Jeżeli nieopatrznie zadaliście pytanie na forum, albo grupie na Facebooku, szczególnie składając swój pierwszy sprzęt, mogliście otrzymać odpowiedź naszpikowaną wprost terminami i skrótami, które są zupełnie dla Was niezrozumiałe. Na przykład:
- "Spróbuj przeflashować FC najnowszym BF i wtedy zrób jeszcze raz dump z CLI."
- "Mogłeś mieć FS podczas lotu. Patrzyłeś w trakcie lotu na wartość RSSI, które masz na OSD?"
- "Może być też tak, że ESC nie obsługują DSHOTa, albo któryś regiel ma inną wersję BLHeli."
- "Aha, zerknij jeszcze, czy XM+ jest FCC, czy LBT, bo możliwe, że apka chodzi na innym FW, niż ci się wydaje i dlatego RX ci się nie binduje."
- "A antenę masz RHCP, czy LHCP? Ważne, żeby po obu stronach były takie same."
- "Jeśli VTX jest z MMCX to nie podłączysz tam anteny z SMA. Ewentualnie możesz użyć pigtaila i wtedy na końcu przykręcić Pagodę stubby."
Niewykluczone, że czytając 4Śmigła.pl nadzialiście się nie artykuł, który przyprawił Was o zawrót głowy, bo autor (czyli ja) zagonił się i nie wyjaśnił każdego ze skrótów, albo anglicyzmu, którego użył. Na szczęście na ratunek przychodzi ten oto słowniczek! Zaczynamy!
Lista alfabetyczna:
1S, 2S, 3S... - określenie liczby cel w danym pakiecie (baterii) litowo-polimerowym połączonych szeregowo. Każda cela jest pojedynczym ogniwem o napięciu znamionowym 3.7V. Można je łączyć szeregowo (stąd oznaczenie "S" - ang. serial) uzyskując na wyjściu sumę napięć na wszystkich celach. Oznacza to, że bateria 3S będzie miała 3 cele połączone wewnątrz szeregowo i napięcie znamionowe 11.1V (ponieważ 3 x 3.7V = 11.1V), zaś pakiet 4S będzie już miał 14.8V (gdyż tutaj mamy 4 x 3.7V = 14.8V).

1.2 GHz - określenie pasma częstotliwościowego, używanego do transmisji wideo na duże dystanse. Sygnał ten, w odróżnieniu od 5.8 GHz jest dużo bardziej przenikliwy i łatwiej przechodzi przez przeszkody, takie jak drzewa, liście, budynki itd. Niższa częstotliwość wymaga jednak dłuższych anten, zaś 5.8 GHz często sprawdza się wystarczająco dobrze, w szczególności z odbiornikami Diversity (patrz: Diversity) typu RapidFire (patrz. RapidFire)
2.4 GHz - określenie jednego z ogólnodostępnych pasm ISM (Industry, Services, Medicine) w zakresie 2400 MHz - 2483 MHz. Powszechnie korzysta z niego sprzęt Wi-Fi (choć teraz także na 5GHz), Bluetooth, a także większość sprzętu zdalnie sterowanego. Dopóki nie zmienimy modułu na Long Range (patrz. CrossFire, R9) oczywiście. Aparatury obsługujące 2.4 GHz stosują różne protokoły w celu komunikacji z odbiornikami i z tego względu wyróżnia się 4 standardy (FrSky: ACCST, ACCESS; FlySky: AFHDS i AFHDS 2A, DSMX oraz Futaba: S-FHSS).
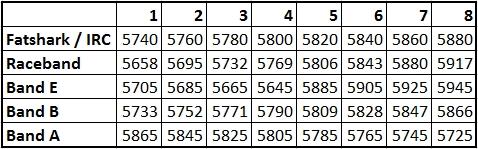
5.8 GHz - jest to, podobnie jak 2.4 GHz, kolejne z dostępnych pasm ISM. Na tej częstotliwości najczęściej odbywa się przesył wideo z koptera do gogli. Pasmo 5.8 obejmuje częstotliwości: 5725 MHz - 5875 MHz. Pod kątem przesyłu obrazu zostało podzielone na 5 różnych pasm, w każdym 8 kanałów. Poszczególne pasma wykorzystują pełne spektrum częstotliwości, jednak każde dzieli je w nieco inny sposób. Piloci wyścigowi wykorzystują tzw. Raceband, w którym kanały zostały ułożone w taki sposób, żeby możliwie się nie zakłócały. Sygnał 5.8 GHz nie wchodzi w kolizję ze sterowaniem na 2.4 GHz, co również jest istotne. Warto też wiedzieć, że im wyższa częstotliwość, tym mniej przenikliwy jest sygnał, co oznacza, że 5.8 GHz dużo łatwiej odbija się od przeszkód i jest przez nie tłumionym. W rezultacie drzewa, liście, budynki skutecznie tłumią ten sygnał, co powoduje, że niektórzy pragnący latać naprawdę daleko stosują albo anteny kierunkowe o bardzo dużym wzmocnieniu (ang. gain), które muszą być skierowane w stronę koptera, albo przechodzą na 1.2 GHz. Zaletą 5.8 GHz jest z kolei to, że można stosować wraz z nim małe i krótkie anteny.
868 MHz - Oznaczenie pasma ISM, które jest używane do lotów dalekich (ang. long-range). Obejmuje ono zakres 868 MHz - 870 MHz. Używa go m.in. TBS Crossfire i FrSky R9. Warto zaznaczyć, iż tej częstotliwości używamy wyłącznie w Europie, ponieważ u nas 900 MHz "gryzie się" z sieciami GSM. Z tej przyczyny wybór profilu EU w przypadku używania R9, czy CrossFire jest niezwykle istotny!
915 MHz - Częstotliwość używana przez TBS CrossFire i FrSky R9 w krajach, których normę reguluje FCC (Patrz: FCC). Często to pasmo jest skrótowo oznaczane jako 900MHz, ale tak naprawdę pasmo ISM dla obszarów obu Ameryk oraz Azji i Oceanii to właśnie 915MHz. Więcej informacji - patrz: 868 MHz, CrossFire, R9
Acro - Jest to jeden z trybów lotu, które wybieramy na ogół przełącznikiem na aparaturze. W Acro, kopter czerpie dane wyłącznie z żyroskopu, a więc te z akcelerometru są pomijane. Oznacza to, że nasz kopter przestaje wracać do pozycji poziomej, gdy puścimy prawy manipulator na aparaturze, a pozostaje w takim ustawieniu, jak w momencie, gdy wycentrowaliśmy drążek. Tryb acro jest używany przez pilotów FPV podczas wyścigów i freestyle z uwagi na to, że nie ogranicza w żaden sposób tego, jak kopter w danym momencie jest ustawiony w stosunku do ziemi. To w tym trybie możemy robić swobodne przewroty, albo chwilowo ustawić się do góry nogami. Jednocześnie tryb ten pozostaje najtrudniejszym, ponieważ dopóki sami nie ustawimy koptera poziomo, on sam do tej pozycji nie wróci. Wśród innych trybów lotu wymieniamy także Angle (inaczej Stabilized lub Atti), Horizon, GPS oraz Altitude Hold.
Actuna - polski sklep, który oprócz osprzętu do składania kopterów FPV, sprzedaje samodzielnie projektowane anteny, które dodatkowo zostają pomierzone pod kątem tłumienia sygnału. Każda z nich ma zapisaną częstotliwość, na której najlepiej jej używać.
Akcelerometr - czujnik przyspieszenia, które jest mierzone w 3 osiach. Używany w celu określenia jak w stosunku do poziomu ziemi ustawiony jest kopter. Dzięki akcelerometrowi kontroler lotu zawsze, gdy puszczamy sterowanie, ustawia kopter w zawisie, w pozycji poziomej. Jest to domyślny tryb w większości zabawkowych kopterów. Akcelerometr ustawia kopter poziomo poprzez pomiar kierunku działania przyspieszenia ziemskiego. Jeśli sprzęt nie jest ustawiony poziomo do ziemi, to akcelerometr wykaże występujące przyspieszenie w więcej niż jednej osi. Czujnik ten jest niezbędny do działania trybów lotu takich, jak Angle albo Horizon. Podlega on też kalibracji. W tym celu układa się kopter na płaskiej powierzchni i informuje kontroler lotu, że to jest wzorcowa pozycja. To do niej będzie dążył kopter w trybie stabilizowanym, więc jeśli znosi go w daną stronę to jest szansa, że to właśnie kwestia akcelerometru.

Altitude Hold - Jest to tryb lotu, który jest dostępny wyłącznie w kopterach z barometrem. Ten ostatni to czujnik ciśnienia atmosferycznego, który pozwala utrzymywać kopterowi stałą wysokość lotu. Pewien utrzymywać on stały pułap, dopóki nie pociągniemy lewego manipulatora w dół lub górę, co będzie sygnałem zmiany wysokości. W trybie Altitude hold może się pojawiać pewne noszenie w górę i w dół zależne od jakości i mocowania czujnika. W celu zmniejszenia fluktuacji najczęściej używa się dodatkowo GPSu, który również podaje bieżącą wysokość. Barometry też kryje się przed słońcem i wiatrem kawałkiem gąbki naklejonej na czujnik. Włączenie Altitude Hold oznacza przy okazji użycie również akcelerometru w celu ustabilizowania lotu także w płaszczyźnie poziomej - tak jak w trybie Angle albo Atti. Jeszcze mocniej wspomaganym trybem jest jeszcze tryb GPS.
Angle - tryb lotu zdefiniowany już w Multiwii, obecny także w BaseFlight, CleanFlight, BetaFlight, EmuFlight, iNav. Oznacza stabilizację z użyciem Akcelerometru (i jednocześnie Żyroskopu). W tym trybie kopter domyślnie utrzymuje pozycję poziomą w stosunku do ziemi, czyli zawis. Ruch manipulatora powoduje wychylenie koptera proporcjonalne do pozycji drążka. W trybie Angle definiujemy maksymalny kąt, o jaki kopter może się przechylić i osiąga go wyłącznie przy skrajnym wychyleniu manipulatora w daną stronę. Po puszczeniu drążka, kopter automatycznie wróci do lotu poziomego. W tym trybie nie da się wykonać żadnego przewrotu i powietrznej ewolucji. Akcelerometr pilnuje, aby kopter zawsze znajdował się w pozycji śmigłami do góry.
Apka, Aparatura (ang. transmitter) - To pierwsze, zwyczajowe, skrócone, to drugie typowo modelarskie oznacza urządzenie, którego używamy do sterowania kopterem. Często przez nowicjuszy nazywana kontrolerem (lepiej), albo pilotem (nieco gorzej). Ta pierwsza nazwa jest popularna wśród użytkowników dronów takich marek jak DJI, czy Yuneec, z uwagi na to, że pod taką nazwą występują aparatury do tych modeli w sklepach. Modelarze i osoby składające swoje koptery samodzielnie unikają nazwy kontroler z uwagi na podobieństwo do z pojęcia - kontroler lotu, który jest częścią samego latającego modelu. Aparatura posiada zawsze manipulatory (ang. sticks) - drążki, którymi się steruje, przełączniki (ang. switches) i pokrętła (ang. pots).

Atti - tryb lotu występujący w kopterach DJI, który jest odpowiednikiem Angle z Betaflight. Oznacza to lot ze stabilizacją, ale bez wspomagania GPS i systemu pozycjonowania z użyciem kamery od spodu koptera. W Atti dron będzie normalnie znoszony przez wiatr, podczas gdy w Position Mode będzie on stale utrzymywał pozycję i kontrował napór powietrza.
"Bacik" - jest to potoczna nazwa anteny dipolowej, często dodawanej do tanich nadajników FPV. Najczęściej kojarzona jest z anteną w plastikowej obudowie, łamanej pod kątem prostym w okolicy wtyku. Ten rodzaj anteny niektórzy dobrze znają z routerów Wi-Fi. Nie jest ona preferowaną przez pilotów z uwagi na podatność na zjawisko multipath i brak polaryzacji kołowej.
"Bezszczotka" - skrócona nazwa silnika bezszczotkowego. Patrz: Silnik Bezszczotkowy
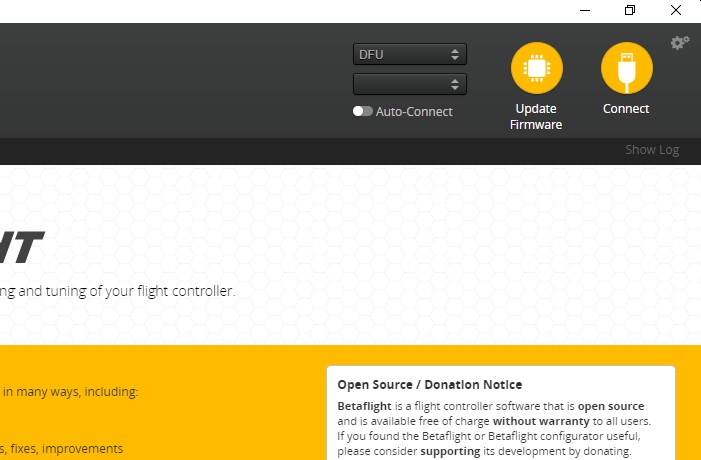
BetaFlight - nazwa oprogramowania obecnego na wielu kontrolerach lotu. Wywodzi się z wcześniejszych: Multiwii, BaseFlight i wreszcie CleanFlight. BetaFlight składa się z Firmware, który jest wgrywany na kontroler lotu oraz Configurator, który służy do ustawiania parametrów z komputera po podłączeniu FC poprzez port USB. Bezpośrednimi alternatywami dla BetaFlight są: Kiss oraz FlightOne, natomiast mają one swoje dedykowane kontrolery lotu. Tym niemniej, w tej chwili zdecydowana większość płytek współpracuje właśnie z BetaFlight.
BF - patrz. Betaflight
BlHeli - nazwa oprogramowania (firmware), która działa na prawie każdym dziś regulatorze obrotów [ESC] (poza Kiss) stosowanym w kopterach. Dawno temu konkurowało ono z SimonK, natomiast po zdominowaniu rynku pojawiają się kolejne ważne wydania, które oznaczają też zmianę mikrokontrolerów na których pracuje. W tej chwili spotkamy przede wszystkim starsze BlHeli_S, które jest wciąż obecne w starszych ESC oraz BLHeli_32, które wzięło swoją nazwę od przejścia z 16-bitowych, na 32-bitowe układy dając nowe możliwości takie jak Bidirectional DSHOT i jeszcze szybszą wymianę danych pomiędzy ESC, a kontrolerem lotu.
BNF (ang. Bind-n-Fly) - oznaczenie gotowego koptera, który w zestawie ma odbiornik, ale nie jest (w odróżnieniu od RTF) dostarczany z aparaturą. Wystarczy go zbindować (skojarzyć) z naszym kontrolerem i można latać. Niektóre zestawy BNF nie mają też baterii, choć tutaj na ogół należy zerkać na opisy.
Bounce-back - jest to reakcja koptera po gwałtownym manewrze, która polega na tym, że najpierw mija on zadaną pozycję, w której miał się zatrzymać (patrz: Overshoot), a następnie odbija lekko w przeciwnym kierunku - to właśnie oznacza bounce-back, czyli dosłownie odbicie. Wynika to ze zbyt małej wartości parametru P lub zbyt małego D w ustawieniach kontrolera PID. Po zbyt słabej kontrze (czyli wyhamowaniu danego manewru), kopter próbuje wrócić do zadanej pozycji korygując lot w przeciwną stronę, z uwagi na to, że docelową zdążył już minąć.
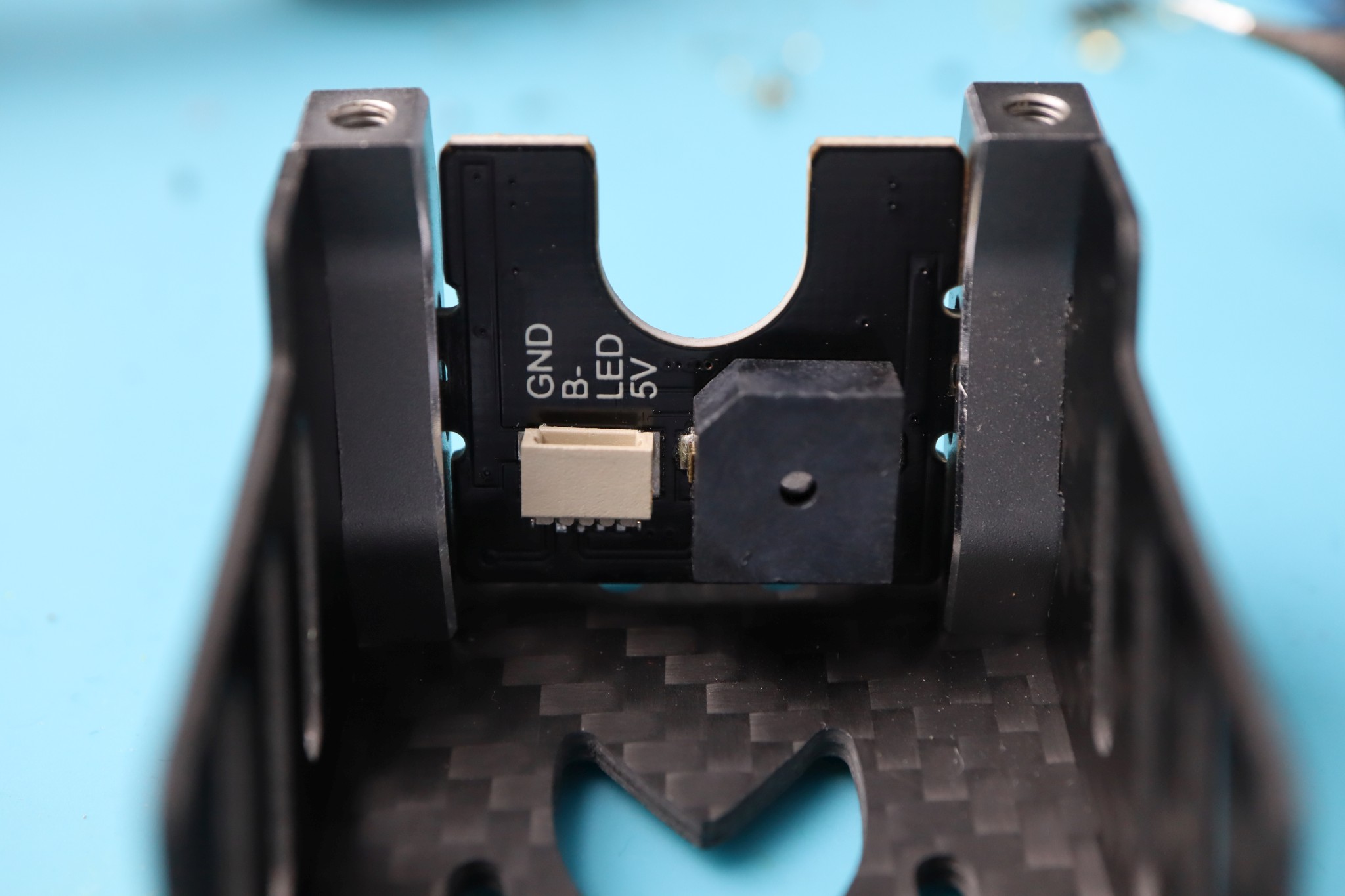
Buzzer - brzęczyk, głośniczek, który będzie odtwarzał dźwięki generowane przez kontroler lotu. Najczęściej buzzera używa się w sytuacji, gdy kopter zniknie gdzieś w trawie, albo krzakach, bo wtedy jego piszczenie łatwo doprowadzi nas do koptera, który leży poza zasięgiem naszego wzroku. Obecnie można też kupić buzzery z własnym zasilaniem, które będą piszczeć, nawet gdy wypnie się nam pakiet Li-Po. Same buzzery występują w wersjach z generatorem lub nie (wizualnie się od siebie nie różnią). Te pierwsze generują dźwięk o danej częstotliwości same - wystarczy tylko podłączyć je do zasilania. Z kolei buzzer bez generatora wymaga podania sygnału PWM o częstotliwości takiej, jak dźwięk, który chcemy uzyskać. Kontrolery lotu w kopterach wymagają buzzera z generatorem, gdyż same decydują tylko o tym, czy prąd ma przez niego popłynąć, czy też nie.
BVLOS (ang. Beyond Visual Line-Of-Sight) - lot poza zasięgiem wzroku. Określenie to stosujemy, gdy pilot porusza się kopterem dalej, niż jest go w stanie obserwować gołym okiem. Na ogół podczas sterowania patrzy wtedy na obraz z kamery koptera - na zewnętrznym ekranie lub goglach. Należy tutaj zauważyć, że z lotem BVLOS mamy de facto do czynienia także, gdy latamy nim blisko siebie, ale na oczach mamy gogle. Wynika to z faktu, że wtedy nie obserwujemy koptera gołym okiem. Liberalne przepisy w Polsce pozwalają wykonywać rekreacyjne loty BVLOS (stan na koniec 2019 roku) w goglach do 200m i 50m wysokości, zachowując oczywiście odpowiednią odległość od ludzi i mienia. Jeśli mamy pokusę latania dalej, powinniśmy mieć drugiego obserwatora, który ostrzeże nas o niebezpieczeństwach, których możemy nie zobaczyć bezpośrednio w kamerze. Jak wspomniałem, w przypadku latania blisko nie ma już takiego wymogu, ale jeśli mamy możliwość poproszenia drugiej osoby, aby informowała nas o otoczeniu, to lot będzie zdecydowanie bezpieczniejszy. Uwaga: Przepisy wciąż się zmieniają, więc zachęcam do szukania aktualnej wykładni, gdyż powyższa mogła już ulec zmianie.
CF - Patrz: CrossFire. Uwaga! Skrót CF, w starych wpisach na forach i grupach dyskusyjnych może oznaczać też CleanFlight, choć to już raczej odmęty przeszłości.

CineWhoop - kategoria kopterów 3-calowych, które charakteryzuje to, że wokół śmigieł mają założone tunele, które chronią osoby postronne przed obrażeniami. Cine pochodzi od cinema (kino) i chodzi o to, że ten typ koptera jest w stanie dźwignąć GoPro, które pozwala na ciekawe nagrania wysokiej jakości. CineWhoopy, dzięki wymiarom i zabezpieczeniu śmigieł pozwalają nagrywać sceny, których piloci nie mieliby odwagi utrwalić kopterem 5-calowym z uwagi na bezpieczeństwo i gabaryty samego koptera. CineWhoopy są więc wykorzystywane do nagrywania scen i reklam wewnątrz budynków oraz latania blisko ludzi (za ich zgodą oczywiście), co pozwala utrwalić zupełnie inną perspektywę. CineWhoopy służą do tworzenia spokojniejszych i płynniejszych ujęć, a nie latania freestyle.

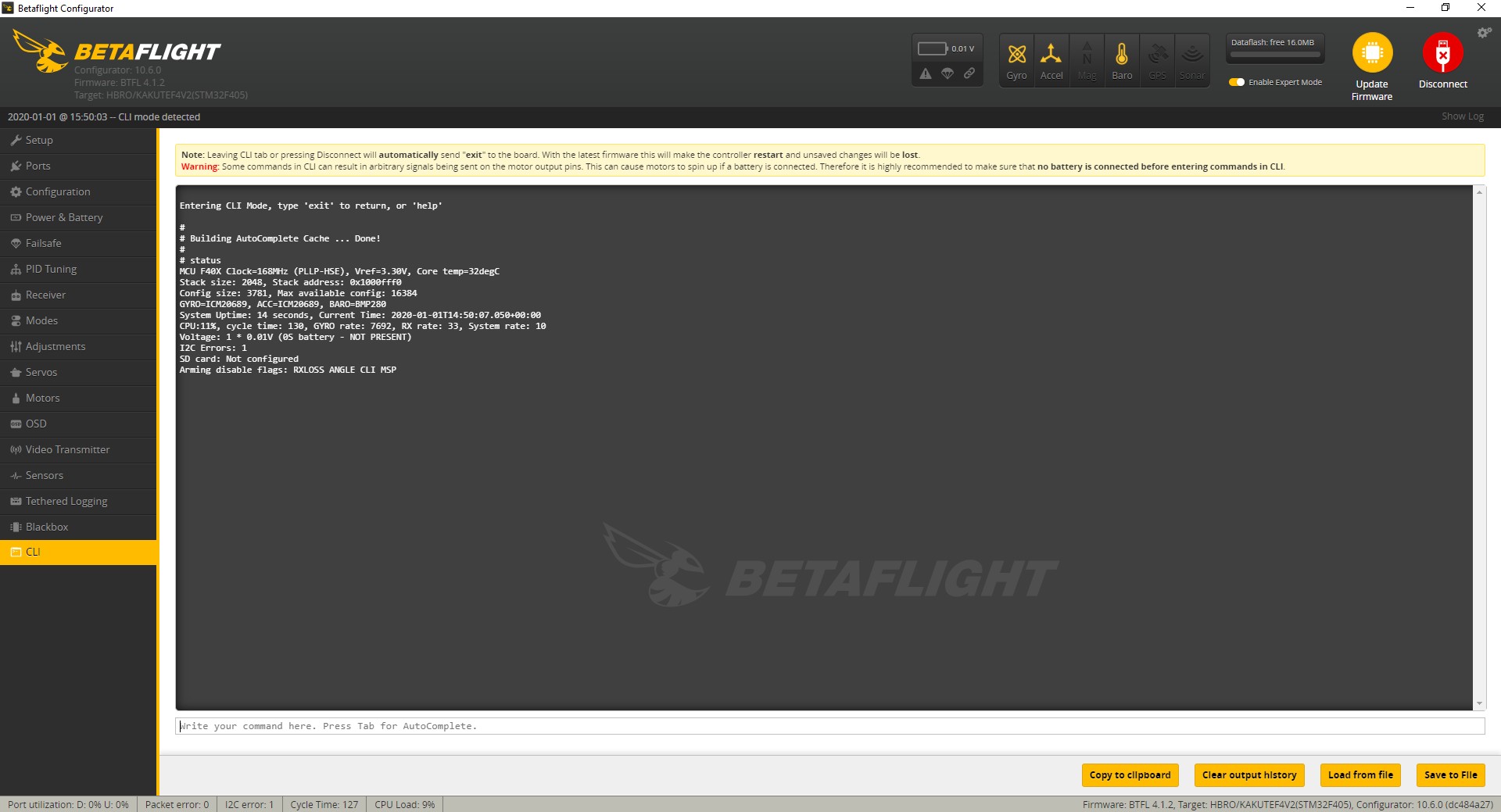
CLI (ang. Command-Line Interface) - jest to jedna z zakładek w BetaFlight (a więc i EmuFlight, ButterFlight etc.), która daje dostęp do linii komend. Możemy tam wpisywać polecenia, które trafią bezpośrednio do kontrolera lotu. Linia komend pozwala wyświetlić i ustawić wszystkie opcje, które są dostępne w BetaFlight, łącznie z tymi, których nie ma w interfejsie graficznym. Można też zrobić tam zrzut ustawień (dump), pobrać wyłącznie elementy, które są inne niż w domyślnej konfiguracji (diff), jak również wkleić czyjś, gotowy zestaw opcji. CLI pozwala doświadczonym użytkownikom na szybsze zmiany znanych opcji, jak również zmianę niskopoziomowych ustawień, do których normalnie nie ma dostępu, bo wymagają nieco więcej wiedzy, aby sensownie je ustawić.
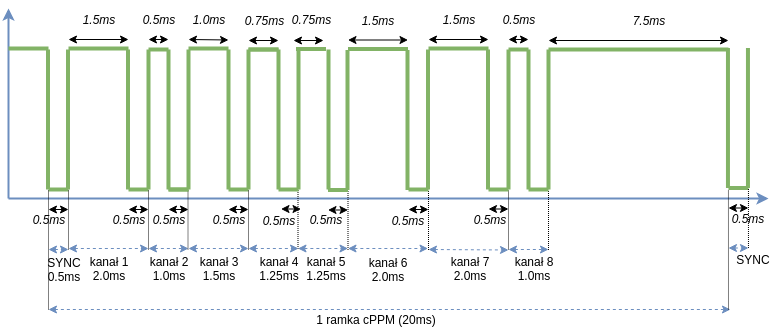
cPPM (ang. collective PPM) - jest to wersja protokołu PPM, która zakłada wysyłkę wszystkich kanałów na jednym przewodzie sekwencyjnie (po kolei) w ramach jednej ramki. W odróżnieniu od PWM i PPM, które wymagały osobnego przewodu na każdy kanał, tutaj można podobnie jak w SBUS wykorzystać tylko jeden przewód. cPPM z rzadka jeszcze spotyka się w bardzo starych rozwiązaniach, ale jego miejsce zdecydowanie przejął SBUS, CSRF, czy DSMX.
CrossFire - Firma TBS (Team Blacksheep) wypuściła system sterowania kopterem pracujący na częstotliwości 868MHz (UE, Afryka, Bliski Wschód, północ Azji) lub 915MHz (Ameryka Północna, Południowa, południowa część Azji, Australia i Oceania). Jest to duża zmiana w stosunku do wszechobecnego 2.4GHz z uwagi na większą przenikliwość fali i mniejsze ograniczenia odnośnie mocy nadawczej. System pozwala na loty tzw. Long Range, czyli dalekiego zasięgu. Przy odpowiedniej konfiguracji anten mówimy tu o dziesiątkach kilometrów. Przy okazji, CrossFire wspiera nowy protokół komunikacji pomiędzy odbiornikiem, a kontrolerem lotu - CSRF. W odróżnieniu od SBUS wykorzystuje on komunikację dwukierunkową (dwoma osobnymi przewodami) i ma mniejsze opóźnienie. Wielu pilotów decyduje się na zmianę dotychczasowego linku RC na R9, albo CrossFire z uwagi na większą gwarancję stabilnego połączenia z kopterem na dłuższych dystansach. Jest ono także droższe od R9 opracowanego przez FrSky.
Demon / DemonRC - skrócona nazwa dla polskiego sklepu internetowego DemonRC.eu, który w ofercie ma autorskie ramy do kopterów FPV - rozmiary od 2 cali, aż do 6 cali. Wśród asortymentu są też części do kopterów - solidnych marek.
Death Roll - niekontrolowane wpadnięcie koptera w nagły obrót wokół dowolnej osi, który na ogół kończy się uderzeniem o ziemię (stąd określenie "death"). Jego przyczyny są różnorakie, ale na ogół jest to awaria sprzętu - silnika, żyroskopu w kontrolerze lotu, desynchronizacja ESC. Rzadziej winę ponosi oprogramowanie - np. zawieszenie albo błąd w kodzie kontrolera lotu.
DFU (ang. Device Firmware Upgrade) - tryb działania mikroukładu (np. kontrolera lotu), w którym możliwa jest podmiana oprogramowanie (firmware). Często odbywa się to poprzez przytrzymanie przycisku Boot podczas podłączania USB do kontrolera lotu, aby wprowadzić go w tzw. tryb Bootloadera. Obecnie BetaFlight pozwala zrestartować kontroler lotu w tym trybie bez konieczności żadnej fizycznej ingerencji. W przypadku BetaFlight w polu ports (tam, gdzie jest COM1-9) pojawia się DFU, abyśmy wiedzieli, że urządzenie jest gotowe do podmiany firmware. Z kolei w Kissie używamy narzędzia DeFuSe.
Dipol, dipolowa antena - jedna z częściej spotykanych w świecie kopterów. Jest tania i prosta w budowie, zaś jej dookólna charakterystyka powoduje, że działa poprawnie, niemalże bez różnicy na jej ułożenie. Najpopularniejsza odmiana to antena liniowa - albo zamknięta w czarnej, plastikowej obudowie aparatur działających na 2.4GHz, albo w postaci miękkiego przewodu w oplocie. Taką spotkamy w większości odbiorników - również w CrossFire, gdzie ma kształt litery T. Często jest ona podstawową w aparaturze (np. Taranis X9D) i pojawia się również w małych kopterach FPV. Tam dostała pieszczotliwe określenie "bacik", ponieważ elastyczna i zamknięta w czarnej termokurczce - takowy przypomina. Jest ona bardziej podatna na zakłócenia z uwagi na polaryzację liniową sygnału. Odbity sygnał wciąż będzie do niej docierał powodując niepożądane zmiany w obrazie. Do transmisji obrazu FPV najczęściej stawia się na anteny z polaryzacją kołową (np. Pagoda, Foxeer Lollipop, TBS Triumph).

Dive - znane z lotnictwa nurkowanie w przypadku lotów kopterami oznacza długotrwałe spadanie, najczęściej wzdłuż jakiejś budowli. Stąd wziął się m.in. building Dive, kiedy to piloci wylatują ponad wysoki budynek, aby następnie ślizgać się wzdłuż jego pionowej elewacji. Dive może też dotyczyć wysokiego komina, mostu i wszystkiego, wzdluż czego da się efektownie opadać.

Diversity - określenie odbiornika, który stosuje więcej, niż jedną antenę do otrzymywania sygnału. W przypadku odbiorników RC na ogół jedna z nich pełni funkcję nadawczą (telemetria), druga zaś otrzymuje sygnał sterujący, ale może być również tak, że obie go przyjmują. W przypadku odbiorników FPV (sygnał wideo), oprócz duplikacji anten (Antenna Diversity) stosuje się także odrębny układ przetwarzający sygnał płynący z danej anteny (Module Diversity). W tym drugim przypadku tak naprawdę mamy 2 odbiorniki oraz układ, który bazując na sile odbieranego przez nie sygnału (RSSI) wybiera ten, który w danym momencie jest mocniejszy. Aby w pełni wykorzystać korzyści płynące z Diversity należy odpowiednio ułożyć anteny, albo stosować różne ich typy. Jeśli anteny są takie same (dipolowe) to powinny one leżeć prostopadle do siebie (kąt 90 stopni), aby druga możliwie dobrze łapała sygnał w pozycji, w której druga jest najmniej optymalnie ustawiona. W przypadku gogli FPV wykorzystuje się na ogół dwie anteny różnego typu (nie jest to sztywna reguła!) - jedną dookólną, która łapie sygnał równie dobrze niezależnie od kierunku, z którego przychodzi (w uproszczeniu), zaś drugą kierunkową, która jest bardziej czuła, ale tylko w wąskim zakresie, w którym jest skierowana. Finalnie, gdy kopter znajduje się obok nas, czy za nami, na ogół sygnał będzie łapała antena dookólna (bo chwyta go z każdego kierunku), zaś gdy odlecimy dalej, albo znajdziemy się za przeszkodą, odpowiednie ustawienie anteną kierunkową w stronę koptera pozwoli nam poprawić jakość sygnału, a nawet zapobiec jego utracie.

DJI - chiński producent dronów zarówno do użytku domowego, jak i profesjonalnego. Znane serie modeli to: Spark, Phantom, Mavic, czy Inspire. Ostatnio DJI wprowadziło na rynek model Mavic Mini, jak również zwróciło oczy pilotów FPV na swój zestaw DJI FPV, który bazuje na cyfrowej transmisji sygnału. Nie jest to pierwsza próba - wcześniej był m.in. Connex ProSight, ale wszystkie poprzednie systemy bardzo źle radziły sobie z osłabieniem sygnału (zamarzanie obrazu). Co prawda w goglach DJI ten temat również nie został w pełni rozwiązany, ale spadek jakości sygnału jest widoczny w postaci pogarszającej się jakości (większych bloków pikseli) oraz wskaźnika w goglach. Daje to pilotom szansę na skorygowanie kierunku i wysokości lotu w celu odzyskania sygnału. Ponadto jest to pierwsze rozwiązanie, które mocno się upowszechnia, także za sprawą bardzo silnego marketingu. W tej chwili konkurencyjnym dla niego pozostaje FatShark ByteFrost, który jednak jest bardziej hybrydą, niż finalnym produktem.

DSHOT - Nazwa cyfrowego protokołu, który jest używany w wymianie danych pomiędzy kontrolerem lotu, a ESC. Jest to w tej chwili najpopularniejsze rozwiązanie. Ostatnim odkryciem jest bidirectional DSHOT, czyli obustronna wymiana danych. W ten sposób kontroler lotu steruje silnikami, zaś regulator dostarcza z kolei informację o ich obrotach. DSHOT ma różne oznaczenia wiążące się z jego prędkością pracy, a dokładniej ilością danych, które wymienia w danym czasie. Ważne, aby zapamiętać, że im wyższa wartość, tym mniejsze opóźnienia w wymianie danych i częstsza ich aktualizacja płynąca z kontrolera lotu. Wyróżniamy DSHOT150, DSHOT300, DSHOT600 i DSHOT1200. Najczęściej dziś spotkamy dwa ostatnie. Sam protokół został opracowany przez Felixa Niessena z Flyduino, który odpowiada za całą linię Kiss (FC i ESC). Cyfrowy protokół w odróżnieniu od analogowych (OneShot i MultiShot) jest bardziej odporny na błędy, które łatwo wykryć i ewentualnie odrzucić nieprawidłowe ramki. DSHOT nie wymaga też kalibracji ESC, ponieważ wartości sygnału są w nim jednoznaczne.
DSMX/DSM2 - jest to protokół komunikacji radiowej używany przez aparatury marki Walkera serii (Devention) Devo i odbiorniki zgodne z nim. Popularnymi alternatywami jest FrSky (ACCST i ACCESS), FlySky (AFHDS i AFHDS 2A) oraz Futaba (S-FHSS) od tychże producentów.
DVR (ang. Digital Video Recording) - nagrywanie obrazu, który jest odbierany przez gogle, albo zewnętrzny ekran. Określenie jest stosowane wielorako, ale zawsze odnosi się do zapisywania wideo z lotu. DVR może oznaczać urządzenie, które jest w stanie rejestrować obraz (np. gogle z DVR), ale piloci też często mają na myśli nagranie z określonego lotu (np. "pokaż DVR z tego dive-u").

"Dzwonek" - zwyczajowa nazwa wirnika silnika bezszczotkowego. To ta zewnętrzna jego część, która się obraca podczas pracy. U góry "dzwonka" znajduje się gwint na którym mocujemy śmigło. Od wewnętrznej strony wirnika przyklejone są magnesy, które są odpychane i przyciągane przez pole magnetyczne powstające w wyniku przepływu prądu przez stojan, na którym nawinięto uzwojenie. Stojan z uzwojeniem pełni funkcję elektromagnesu.

{kind=link}
EmuFlight - jest to oprogramowanie do kontrolerów lotu, które wywodzi się (tzw. fork) z BetaFlight . W odróżnieniu od tego ostatniego, jest skupione wokół zapewniania możliwie najlepszego filtrowania i parametrów lotu. Również konfigurator bazuje na BetaFlight. W chwili pisania tego artykułu, EmuFlight jest dość młode i czas pokaże, czy skończy się na ambitnym planie i oprogramowanie podzieli los ButterFlight (które miało podobne ambicje), czy też wyrośnie na realną alternatywę.
ESC (ang. Electronic Speed Controller) - regulator obrotów do silnika bezszczotkowego. Płytka zwana kontrolerem lotu (FC) przekazuje do niego sygnał sterujący, który jest interpretowany przez procesor i poprzez tranzystory zamieniany na prąd przemienny sterujący samym silnikiem. Rolą ESC jest rozpędzanie i hamowanie silnika, a więc sterowanie jego obrotami - stąd nazwa.
EU LBT - oznaczenie oprogramowania odbiorników, które jest przeznaczone dla krajów Unii Europejskiej (stąd skrót: EU) oraz innych, w których stosuje się regulacje tworzone przez ETSI (w odróżnieniu od amerykańskiego FCC). LBT to skrót od Listen-Before-Talk, które oznacza, iż nadajniki powinny najpierw zobaczyć, czy w danym momencie nie odbywa się inna transmisja na częstotliwości, którą chce zająć i dopiero wtedy wysłać dane. W przeciwnym razie wprowadzane jest mikroopóźnienie, które pozwoli nie wejść w kolizję z innym nadajnikiem. Należy wziąć pod uwagę, że firmware FCC i EU LBT są ze sobą niekompatybilne i musimy mieć wgrany ten sam rodzaj w module nadawczym aparatury, jak i odbiorniku.
Expo - nazwa pochodzi od funkcji eksponencjalnej (czyli wykładniczej). Blisko zera rośnie ona powoli, zaś im dalej, tym silniej jest nachylona. W modelarstwie mówimy o tym parametrze w kontekście ustawienia aparatury, bądź konfiguracji sterowania po stronie oprogramowania naszego koptera. Chodzi o takie ustawienie reakcji na ruch manipulatorów, w którym przy niewielkich wychyleniach, mamy bardzo łagodną, płynną reakcję na ruch, co daje precyzję, zaś przy skrajnych, mamy gwałtowniejszą i szybszą, co pozwala na dynamiczne manewry. W expo chodzi głównie o wygładzenie sterowania przy niewielkich wychyleniach, aby kopter przy delikatnych ruchach nie reagował zbyt mocno.
F3, F4, F7 - Są to oznaczenia rodziny procesorów produkowanych przez STMicroelectronics, które są absolutnie dominujące na kontrolerach lotu w zastosowaniach nieprofesjonalnych. Kolejne generacje pozwalają na wyższe taktowania, a więc wykonują więcej operacji na sekundę, często też pozwalają na częstszy odczyt danych z żyroskopu i mają więcej mocy obliczeniowej np. dla wszelkiego rodzaju filtrów. Oczywiście na tym różnice się nie kończą. W obecnej chwili odchodzi się już od generacji F3 (BetaFlight już nie wspiera ich w najnowszych wersjach) na rzecz F4 oraz F7.
FatShark - producent niezwykle popularnych gogli do FPV. Znawcy tematu kojarzą różne linie tych produktów: Attitude, Dominator, HD, HDO.

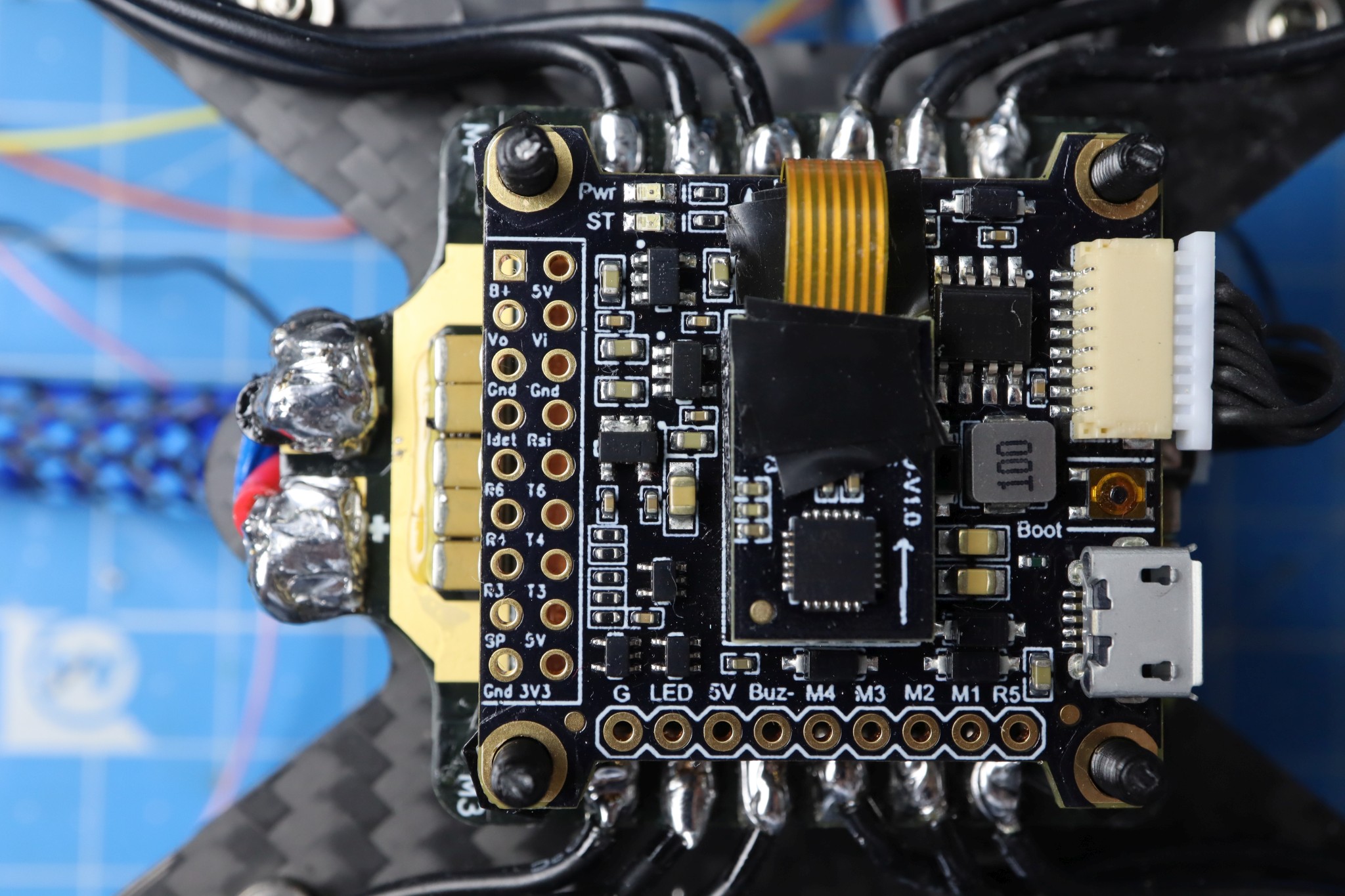
FC (ang. Flight Controller) - jest to płytka, której obowiązkowym wyposażeniem jest procesor (patrz wyżej: F3, F4, F7), żyroskop oraz akcelerometr. Jest to serce koptera. Kontroler lotu odpowiada za odbiór sygnału z odbiornika; sterowaniem ESC, a w konsekwencji obrotami silników; filtrowaniem odczytów żyroskopu; stabilizacją koptera w locie poprzez akcelerometr; nakładaniem OSD na obraz z kamery; obsługą peryferiów takich jak GPS, czy SmartAudio w nadajniku; i jeszcze można by wymieniać. Obecnie kontrolery lotu najczęściej są w pełni zintegrowanymi układami w ramach jednej płytki o rozstawie otworów 30.5mm x 30.5mm w przypadku większych kopterów (3"+) oraz 20mm x 20mm w przypadku mniejszych, bądź lżejszych konstrukcji. Kontroler lotu może mieć też gniazdo microSD, aby rejestrować parametry lotu (Blackbox), a z pewnością ma złącza UART, które można potraktować jak odpowiednik komputerowego USB - wykorzystujemy je do podłączenia różnego rodzaju zewnętrznych urządzeń takich jak GPS. W zasadzie wszystkie dziś kontrolery lotu, które działają w oparciu o oprogramowanie BetaFlight mają także wlutowany moduł MAX7456, który odpowiada za OSD, czyli nałożenie dodatkowych informacji na obraz, który pokazuje kamera. Wybór kontrolera lotu najczęściej wiąże nas też z konkretnym rodzajem oprogramowania, które wspiera. Z jednej strony mamy oprogramowanie zapoczątkowane przez MultiWii, a obecnie dzielące się pomiędzy BetaFlight, EmuFlight, iNav i inne. Następnym, odrębnym obozem jest Kiss, a trzecią opcją FlightOne. W niektórych przypadkach możliwe jest przejście z jednego w drugi, ale najczęściej jesteśmy związani z daną opcją. Należy nadmienić, iż Kiss i FlightOne są związane z konkretnymi producentami (z drobnymi wyjątkami), zaś BetaFlight jest z tego wszystkiego najbardziej otwarte i powszechne, ponieważ bardzo wiele firm produkuje kontrolery lotu właśnie pod to oprogramowanie (i jemu podobne, wywodzące się ze wspólnej gałęzi).
FCC - oznaczenie Federalnej Komisji Łączności w USA, która reguluje zasady wydawania i użytkowania danych pasm częstotliwości radiowej. Użytkownicy dronów spotykają się z tym skrótem kupując aparatury lub odbiorniki. Oznaczenie "FCC" oznacza sprzęt, który ma firmware dedykowany dla krajów spoza Unii Europejskiej (my mamy własny standard EU LBT). Na szczęście oprogramowanie zarówno aparatury, jak i odbiornika da się łatwo podmienić, więc nawet jeśli mamy niekompatybilny komplet - możemy łatwo to zmienić.
FHSS (ang. Frequency Hopping Spread-Spectrum) - metoda rozpraszania widma sygnału radiowego poprzez ciągłe skakanie po częstotliwościach. Przy okazji zakupu aparatury możecie się spotkać z takim skrótowcem. Aby dwa urządzenia radiowe mogły się efektywnie skomunikować, muszą pracować na tej samej częstotliwości. Jeżeli jednak ktoś inny będzie jednocześnie nadawał na niej, albo zbliżonej - urządzenia będą wzajemnie się zakłócać. Jednym ze sposobów ograniczenia zakłóceń niezależnie od tego, które częstotliwości są używane, jest ciągła ich zmiana (wielokrotnie w ciągu sekundy). Nadajnik i odbiornik zmieniają częstotliwości według określonego klucza, co pozwala im utrzymać ciągłość komunikacji. Jednocześnie mogą wykorzystać całe pasmo i nawet jeśli jego fragmenty będą zajęte, to szansa na zakłócenie całej komunikacji jest niewielka. Daje to większą pewność, że dane wysłane zostaną odebrane - przynajmniej częściowo, a być może w całości, jeśli mechanizmy korekcyjne na to pozwolą. W przypadku apartury 2.4 GHz wykorzystującej to rozwiązanie, będzie ona użytkowała pełne pasmo tego zakresu (trochę tak, jakby router Wi-Fi pracował jednocześnie na wszystkich 13 kanałach) i w ten sposób będzie unikać lokalnych zakłóceń. Wiele aparatur w tym standardzie jest też w stanie pracować równolegle z uwagi na to, że każda z nich może używać innego klucza zmiany częstotliwości, a więc w danym momencie nie będą na siebie nachodzić. Jedną z technologii, która używa odmiany FHSS jest Bluetooth.
Flashowanie - proces wgrywania nowszej wersji oprogramowania do danego układu. Wśród pilotów FPV najczęściej mówi się o flashowaniu kontrolera lotu, lub ESC.
FlightOne - producent sprzętu związanego z kopterami FPV. Wcześniej występujący pod nazwą RaceFlight, skupiony na produkcji kontrolerów lotu i własnego oprogramowania do nich. Po swoistej awanturze związanej z własnością kodu źródłowego, po zawirowaniach, całość odżyła jako FlightOne przy okazji rozszerzając dostępny sprzęt o ESC, ramy (sygnowane imionami znanych pilotów FPV). FlightOne jest intensywnie skupione na przystępności początkowej konfiguracji, która obecnie nie wymaga podłączenia do komputera - wszystko robi się poprzez OSD i aparaturę, skupiając się również na zapewnieniu odpowiednich parametrów lotu. Oprogramowanie w odróżnieniu od BetaFlight ma zamknięte źródła, co oznacza, że nie jest ono publicznie dostępne, producent pracuje nad nim sam i de facto ogranicza je do własnego sprzętu. Podobną strategię stosuje również Kiss zapewniając swój ekosystem i oprogramowanie. Zwolenników każdej z opcji nie brakuje, więc i niekończących się dyskusji na temat, które oprogramowanie jest lepsze.
FlySky - producent aparatur i odbiorników. Tak jak i pozostali gracze na rynku, również i ten ma własny protokół, który zapewnia komunikację pomiędzy obydwoma urządzeniami. Tak naprawdę są to dwa protokoły: AFHDS oraz AFHDS 2A. Własny standard oznacza, że musimy się trzymać odbiorników od FlySky, ponieważ nie ma kompatybilności z nota bene podobnym w nazwie FrSky (czytane: FriSkaj), czego nie należy mylić, ponieważ to dwie różne firmy. Wielu początkowych adeptów latania zaczyna właśnie od FlySky, ponieważ najtańszą aparaturę dostarcza ta właśnie firma i jest nią FS-i6. Obecnie sprzęt od FlySky np. Nirvana bazuje już na otwartym oprogramowaniu OpenTX (to samo, co w Taranisach od FrSky) i wspiera zewnętrzne moduły np. CrossFire, czym otwiera się na więcej odbiorców.
FMC - oznaczenie zestawów DJI Fly More Combo. Producent różne drony sprzedaje w wersji podstawowej (kontroler oraz sam kopter) oraz właśnie Fly More Combo. Ta druga to na ogół pełny zestaw z dodatkowymi bateriami, ładowarką, etui itd. Ostateczne wyposażenie zależy od modelu (Mavic Mini, Mavic Air, Mavic Pro), ale zważywszy na ceny akcesoriów DJI, często warto jest dopłacić do takiego zestawu.

FOV (ang. Field of View) - jest to szerokość pola widzenia, którą zapewniają gogle oraz kamera. W przypadku tych pierwszych, oznacza to de facto wielkość obrazu, jaką zobaczymy po założeniu sprzętu. Im większy FOV, tym ekran będzie się wydawał większy. W przypadku bardzo małej wartości rzędu 20, będziemy mieli wrażenie patrzenia na znaczek pocztowy (Eachine EV100). Większy obraz zapewni FOV w granicach 35 (Fatshark HDO) - 42 (Fatshark HD3). Z kolei gogle tzw. kubełki, które mają jeden ekran i soczewkę fresnela z przodu potrafią mieć FOV rzędu 70, które sprawia, że dużą część naszego pola widzenia zajmie obraz z gogli. Daje to wrażenie imersji (zanurzenia), czyli poczucia, że faktycznie siedzimy w środku koptera, ale jednocześnie nie będziemy w stanie objąć wzrokiem całego obrazu. Dlatego tak popularne są gogle z dwoma soczewkami i osobnymi wyświetlaczami na każde oko, ponieważ stanowią kompromis - patrząc w jeden punkt widzimy cały obraz, ale jednocześnie wyświetlacze są na tyle duże, że widzimy szczegóły. W przypadku gogli kubełkowych na ogół musimy poruszać gałką oczną, aby rozglądać się na boki - nie widzimy ostro wszystkiego na raz. Z kolei FOV w kamerze oznacza kąt widzenia, jaki zapewnia stosowana soczewka. Im krótsza ogniskowa (ang. focal length), tym większy FOV, a więc kąt jaki obserwuje kamera. Najczęściej mówimy o wartościach rzędu 120 - 170 stopni. Te pierwsze powodują, że widzimy mniej dookoła, ale te ostatnie z kolei zniekształcają mocno krawędzie obrazu, w zamian pozwalając widzieć wiele z tego, co się dzieje wokół nas.
FPV (ang. First Person View) - określenie latania, w którym zamiast obserwować kopter gołym okiem (VLOS), śledzimy obraz z kamery zamocowanej na urządzeniu latającym poprzez gogle lub zewnętrzny ekran. FPV jest często kolejnym krokiem w lataniu kopterami po nauczeniu się sterowania i kontroli w lotach LOS. FPV daje wrażenie siedzenia za sterami danego koptera i kontrolowanie go z wnętrza. FPV pozwala też latać dalej, niż widzimy kopter, oraz kadrować obraz, jeśli jednocześnie nagrywamy go drugą kamerą typu GoPro.

FrSky - najpopularniejszy bodaj producent aparatur i odbiorników. Znany najbardziej z serii Taranis. Współpracuje blisko z OpenTX, które z kolei opracowuje oprogramowanie do tychże. FrSky podobnie jak FlySky (nie mylimy tych dwóch - to odrębni producenci!) ma swoje autorskie protokoły do komunikacji z odbiornikami: ACCST i nowszy ACCESS. Natywnie jest obsługiwany przez wszystkie aparatury FrSky i niekompatybilny np. z FlySky. Aparatury innych producentów, które posiadają gniazdo zewnętrznych modułów mogą zapewnić współpracę, szczególnie z tym pierwszym protokołem, natomiast w ogólności wiążemy się z danym producentem i jego odbiornikami. Najbardziej w tej chwili znane moduły odbiorcze to: seria XSR oraz XM. Odbiorniki z tej pierwszej mają telemetrię (a więc przesyłają dane także w drugą stronę - do aparatury), zaś te drugie są tańsze, ale jej nie posiadają. W ogólności aparatury od FrSky są droższe od FlySky, natomiast bez wyjątku posiadają one złącze umożliwiające wpięcie innego modułu nadawczego takiego jak FrSky R9 (moduł 868-900MHz od FrSky do lotów dalekich), czy TBS CrossFire (te same częstotliwości, co R9, również loty dalekie). Podobną elastyczność FlySky usiłowało uzyskać z pomocą modelu Nirvana.
FS-i6 - najtańsza aparatura od FlySky - z tej też przyczyny bardzo często wybierana przez początkujących pilotów. Jest ona dość "plastikowa" i "toporna", ale zalicza się do regularnych aparatur modelarskich. Do jej podstawowych wad zalicza się współpracę z protokołami od FlySky, które są po prostu mniej popularne, niż FrSky (i nie wszyscy kupujący rozumieją ten brak kompatybilności), jak również niełatwe podłączanie jej do komputera. O ile aparatury od FrSky mają złącze USB, o tyle w przypadku FS-i6 od FlySky musimy ją podłączać poprzez port mikrofonowy i odpowiednią przejściówkę wraz z oprogramowaniem, które jest nietrywialne w konfiguracji. W rezultacie autor bloga 4Śmigła poleca jednak rozważyć dopłacenie do jednego z modeli od FrSky (ale to jego prywatna opinia!)

Gimbal - stosowane na ogół w 2 kontekstach. Oznacza on po pierwsze mocowanie kamery, które przy pomocy silników będzie stabilizowało ją zawsze w tej samej pozycji. Np. 3-osiowy gimbal w DJI Mavic Air utrzymujące obiektyw zawsze w tej samej pozycji w stosunku do horyzontu niezależnie od wychylenia koptera. Po drugie jest to określenie stosowane w odniesieniu do mechanizmu, który zapewnia pracę manipulatora (drążka) w aparaturze. W modelarskich najczęściej występują gimbale oparte o potencjometry lub czujniki Halla (ang. Hall Sensor Gimbal) - oba mierzą wychylenie manipulatora w obu osiach (pionowej i poziomej), z czego ten drugi jest droższy i bardziej pożądany z uwagi na większą precyzję i wolniejsze zużycie.


Halle, Hall Sensor - czujnik Halla, którego celem jest pomiar pola magnetycznego i przekazywanie jego wartości w postaci numerycznej. Sensor ten jest wykorzystywany np. w manipulatorach, aby mierzyć ich wychylenie. Tradycyjnie gimbale w aparaturach wykorzystują potencjometry, których rezystancja zmienia się wraz z pozycją. Wadą jest to, że potencjometry bazują na wielu mechanicznych elementach, które podlegają zużyciu i ich prezycja na tym traci. Gimbal z sensorem Halla może mieć mniejsze opory podczas pracy, jak również charakteryzuje się wyższą trwałością, ponieważ cały mechanizm jest de facto prostszy mechanicznie, a więc też w mniejszym stopniu się zużywa.
Headless Mode - tryb, w którym kontroler lotu wspiera się magnetometrem (elektronicznym kompasem) lub akcelerometrem w celu uproszczenia sterowania kopterem. Chodzi o uniezależnienie się od obrotu koptera w kontekście lotu przód-tył, lewo-prawo. Bez headless mode kopter będzie poruszał się w osi poziomej zależnie od tego, w którą stronę jest odwrócony. "W przód" będzie oznaczało - tam gdzie znajduje się przód koptera. W przypadku headless mode - ruch manipulatora będzie zawsze wymuszał ruch w tą samą stronę - niezależnie jak zwrócony do nas jest kopter. W teorii tryb ten jest przeznaczony dla nowicjuszy, aby ułatwić im latanie, jednak zawodność tego trybu (obracanie się osi sterowania w czasie) powoduje, że nie jest on specjalnie pożądany i celowo nieobecny w sprzęcie z nieco wyższej półki.
HD3, HDO, HDO2 - Oznaczenia najwyższych modeli gogli FPV firmy Fatshark. Jest parę serii, zaczynając od najniższych: Teleporter, Attitude, Dominator, i wreszcie HD. Model HD3 to następca HD2 z bardzo dużym polem widzenia (patrz: FOV), zaś HDO to pierwsze gogle z ekranami OLED (zamiast LCD), które zapewniają bardzo dobre nasycenie barw i kontrast. Obecnie rynkowym topem są gogle HDO2, które konkurują z nowymi na rynku - Orca, wyposażonymi dokładnie w te same ekrany OLED.
Horizon - tryb lotu, który jest połączeniem trybu stabilizowanego (Angle albo Attitude) i Acro. W Horizon przy pełnym wychyleniu manipulatora, kopter zachowuje się jak w Acro, co oznacza, że może wykonywać przewroty w różnych kierunkach, a odczyty akcelerometru nie są brane pod uwagę (kopter możemy obrócić brzuchem do góry w powietrzu). Jednak już przy mniejszych wychyleniach akcelerometr staje się z powrotem aktywny, a kopter wraca do stabilizowanego trybu, w którym siła wychylenia manipulatora decyduje o tym, jak mocno kopter pochyli się w danym kierunku, nie przekraczając jednak zadanego kąta. Tryb Horizon jest dobry dla pilotów, którzy boją się ewolucji (w zasadzie przewrotów wokół własnej osi) w Acro i chcą je wykonać w sposób kontrolowany. W tym momencie, gdy stracą kontrolę nad kopterem (nie mogąc wyrównać lotu po przewrocie), kopter po puszczeniu prawego manipulatora sam ustabilizuje lot w pozycji poziomej.
iNav - jest to odgałęzienie oprogramowania CleanFlight, które skupia się na maksymalnym wykorzystaniu zewnętrznych czujników w kopterze w celu zapewnienia możliwie automatycznego i autonomicznego lotu. INav stosuje się w kopterach, które mają przynajmniej GPS i najlepiej kompas (magnetometr) oraz barometr, co pozwala mu na bieżąco kontrolować własną pozycję, jak również ruch w przestrzeni. iNav może też nam posłużyć do obsługi modelu, który ma latać autonomicznie po wyznaczonej trasie.

Jumper - firma, która produkuje aparatury - konkurencyjne do sprzętu FrSky, czy FlySky. Dość świeża, ale skutecznie rzucająca wyzwanie cenowe i funkcjonalne modelami T12 i T16.

Kret - pieszczotliwie nazwane zarycie kopterem o ziemię. Jeżeli odpowiednio szybko koptera nie rozbroimy, jest szansa, że śmigła zdążą wykopać jeszcze odpowiedni dołek, co dodatkowo wiąże się z nazwą. Z uwagi na analogię do kreta, który ryje w gruncie, powieszenie koptera na drzewie (równie częste) już 'kretem' się raczej nie nazywa.
Kubły, Kubełki - pieszczotliwa nazwa gogli, które zamiast dwóch osobnych ekranów i kompaktowych rozmiarów posiadają jeden duży wyświetlacz dla obojga oczu i na ogół soczewkę Fresnela przed ekranem. Nazwa wzięła się prawdopodobnie z tego, że wyświetlacz jest odsunięty dość daleko od oczu, co powoduje, że gogle są podłużne i mocno odstają na długość od twarzy. Najczęściej "kubełki" zaliczają się do tańszych, prostszych gogli, podczas gdy te lżejsze, bardziej kompaktowe to domena drogich modeli, w których dla każdego oka przeznaczono miniaturowy wyświetlacz, co mocno wpływa na ich gabaryty.

LHCP (ang. Left Hand Circular Polarization) - oznaczenie polaryzacji kołowej lewoskrętnej. Dla pilotów FPV istotne jest to, że anteny tego typu stosujemy po obu stronach, czyli np. LHCP w kopterze, oraz w goglach, które odbierają sygnał. Sygnał o takiej polaryzacji wynikowo daje mniej zakłóceń przy odbiciach i opóźnieniu transmisji, ponieważ antena "odrzuca" sygnał o przeciwnej polaryzacji. Tego typu rozwiązanie pozwala też separować sygnały z anten RHCP nawet na zbliżonych kanałach, ponieważ antena jednej polaryzacji w dużej mierze "wycina" drugą z nich. Anteny o polaryzacji kołowej są chętniej używane niż anteny liniowe, które są prostsze, ale prezentują nieco gorsze parametry, szczególnie jeśli mówimy o transmisji sygnału wideo.
Lipo, Lipol - określenie pakietu Litowo-Polimerowego - podstawowego sposobu zasilania dronów. Charakteryzuje się on niezwykle dużym prądem, który może oddawać przy dość niewielkich gabarytach i wadze.
LUA - interpretowany język programowania, który można uruchamiać także na urządzeniach o niewielkiej mocy obliczeniowej. Oprogramowanie OpenTX obecne w aparaturach FrSky Taranis, FlySky Nirvana, czy Jumperach zawiera interpreter i maszynę wirtualną pozwalającą uruchamiać skrypty napisane w języku LUA. Piloci FPV wykorzystują dedykowane programy dla kontrolerów Kiss oraz tych wspierających BetaFlight, w celu ustawienia wielu funkcji. Skrypty LUA pozwalają zmienić ustawienia nadajnika FPV poprzez SmartAudio, zmodyfikować PIDy, Rates, a także zmienić filtrowanie. Dzięki temu, że programy można uruchomić bezpośrednio na aparaturze, nie trzeba ani OSD, ani komputera. Pozwala to zmienić wiele opcji w sposób natychmiastowy i łatwy.
Manipulatory (ang. sticks) - są to drążki aparatury, którymi sterujemy kopterem. Nazwa wywodzi się jeszcze z modelarstwa, a jej znajomość na ogół świadczy o tym, że używający jej latał czymś więcej, niż tylko gotowym sprzętem DJI.

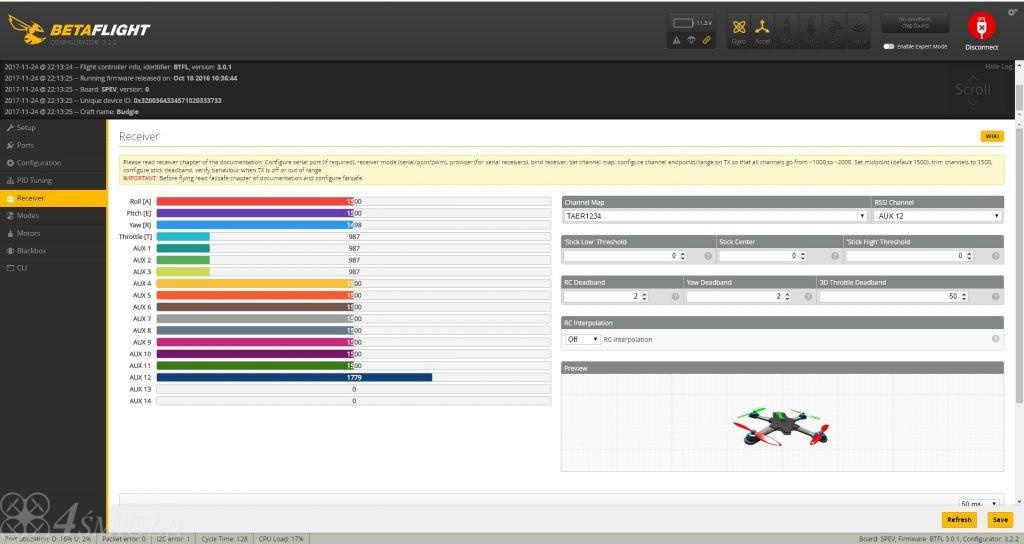
Mode - manipulatory w aparaturze ruszają się w dwóch płaszczyznach, co oznacza, że każdy z nich odpowiada za dwie osie sterowania. Razem, na dwóch manipulatorach sterujemy wartościami: Throttle, Pitch, Roll i Yaw. To, który drążek (i płaszczyzna ruchu) odpowiada za daną oś sterowania wynika z ustawienia Mode numerowanego od 1 do 4. W tej chwili większość świata lata na Mode 2, który specyfikuje, że lewy manipulator w pionie odpowiada za Throttle (gaz), w poziomie za Yaw (obrót w osi pionowej), zaś prawy w pionie to Pitch (pochylenie), a w poziomie (Roll). Nic jednak nie stoi na przeszkodzie, aby przepustnica była na prawym manipulatorze (w osi pionowej), zaś Yaw pozostało na lewym. Mamy wtedy konfigurację Mode 1. W niektórych aparaturach łatwiej bądź trudniej możemy zmienić ustawienie Mode na inny tryb. Jest to łatwiejsze w tych, w których oba manipulatory wracają do środkowej pozycji. W tych, w których w osi Throttle nie ma sprężyny i manipulator pracuje luźno na ogół wymaga to otwarcia aparatury i regulacji napięcia sprężyn centrujących, ale finalnie rozwiązanie zależy od producenta. W przypadku zabawkowych modeli na ogół trzeba przekładać i przelutowywać całe gimbale od aparatury.
Monopolowa (antena) - najprostszy rodzaj anteny, która najczęściej jest tylko cienkim drucikiem wychodzącym z płytki - np. kontrolera lotu. Drugą część anteny stanowi sama płytka, do której przylutowana została antena, stanowiąca drugą połowę aktywnego elementu. Więcej informacji znajduje się tutaj: https://4smigla.pl/podstawowa-wiedza-na-temat-anten/
MMCX - złącze antenowe zyskujące coraz większą popularność z uwagi na wymiary i pewność wpięcia anteny. Jest dużo mniejsze od SMA i bardziej pewne od u.fl. Jedyną wadą z punktu widzenia montażu w kopterze może być duża sztywność samego wtyku, więc trudno może być ułożyć pigtail lub przewód antenowy wewnątrz kadłuba.
OneShot - analogowy protokół do komunikacji kontrolera lotu z ESC. Został wprowadzony jako szybszy niż PWM. Oneshot występuje w dwóch wariantach: Oneshot125 i OneShot42. Jest to oznaczenie, które wiąże się z długością ramki (2x 125us = 250us lub 2x 42us = 84us). Ramka zawsze trwa tyle samo, natomiast zmienia się jej wypełnienie. Przy przepustnicy = 0%, OneShot125 najpierw poda stan wysoki przez 125us, a potem przez drugie 125us będzie to stan niski. Razem 250us. W przypadku przepustnicy na 100%, przez całą długość ramki utrzyma się stan wysoki. Oneshot wykorzystuje PWM, czyli stopień wypełnienia impulsu. Im dłużej utrzymuje się stan wysoki, tym wyższa wartość jest przesyłana. Ramka OneShot 42 została skrócona do 84us, co powoduje, że pozwala on dostarczać dane do ESC 3 razy szybciej. W OneShot125 ramka trwa 250us, co oznacza, że w ciągu sekundy można przesłać ich 4000. Oznacza to też częstotliwość komunikacji z ESC na poziomie 4kHz. Z kolei już OneShot42 to 12kHz. Szybszy protokół pozwala szybciej reagować silnikom, ponieważ ESC częściej otrzymuje oczekiwaną wartóść obrotów danej jednostki, którą steruje.
Optical Flow Sensor - jest to czujnik, który składa się z kamery i procesora, który przetwarza obraz. Kamera jest skierowana pionowo w dół i cały czas rejestruje to, co dzieje się pod dronem. Podstawą działania jest porównywanie pomiędzy sobą kolejnych obrazów i na podstawie ich różnicy - analiza, w którą stronę kopter się przesunął, a więc i w jaki sposób skorygować ten ruch. Optical Flow Sensor działa najlepiej na niewielkiej wysokości (co jednak zależy od jakości kamery i algorytmu), gdzie wspomaga dane z GPS, który siłą rzeczy nie jest aż tak precyzyjny. Z oczywistych względów czujnik ten nie działa po zmroku i nad całkowicie jednolitymi powierzchniami.

ORQA - dość świeża marka na rynku. Dotychczas wyprodukowała swoje pierwsze gogle ORQA FPV One konkurujące z najmocniejszymi modelami na rynku.

OSD - (ang. On Screen Display) to wyświetlanie dodatkowych informacji na obrazie, który pochodzi z kamery. Nakładanie tekstu jest realizowane poprzez specjalny układ MAX7456, który przyjmuje sygnał w standardzie PAL lub NTSC, a następnie na niego nanosi teskt wygenerowany przez kontroler lotu. OSD pozwala wyświetlać informacje takie jak pozycja i wysokość koptera (dane z GPS), napięcie baterii, czy siła sygnału (RSSI). Obecnie OSD jest częścią albo kontrolera lotu (wtedy sygnał podajemy z kamery na FC, a z FC do nadajnika FPV) albo wbudowane jest bezpośrednio w kamerę. W tym drugim wypadku kamera jest w stanie wyświetlać zdefiniowaną nazwę koptera oraz napięcie baterii, które jest mierzone przy pomocy dodatkowego przewodu, który lutujemy do "+" zasilania. W przypadku OSD w kamerze mamy więc skromniejszy zestaw informacji, ale jeśli nasz kontroler lotu nie ma układu odpowiedzialnego za On Screen Display (np. FC Kiss), to mamy przynajmniej tyle. Dodatkowo możemy wtedy połączyć przewód sygnałowy kamery bezpośrednio z nadajnikiem.

Overshoot - oznacza, że kopter po gwałtownym manewrze (np. przewrót 360 stopni wokół własnej osi) mija pozycję, w której powienien się zatrzymać i jeszcze przez chwilę kontynuuje obrót, mimo, iż manipulator już nie jest wychylony. Jest to na ogół związane ze zbyt niskim parametrem P kontrolera PID, który powoduje, że kopter niewystarczająco mocno kontruje (wyhamowuje) manewr, który przed chwilą wykonaliśmy.
Pagoda - antena o polaryzacji kołowej, która składa się z dwóch płaskich płytek zamocowanych jedna nad drugą. Jest to alternatywa dla anteny typu "koniczynka". Najczęściej Pagoda z uwagi na jej kruchość znajduje się w osłonce z TPU (drukowana na drukarce 3D) lub innego miękkiego materiału. Wiecej informacji tutaj: https://4smigla.pl/podstawowa-wiedza-na-temat-anten/

Pakiet - określenie zamiennie stosowane najczęściej dla baterii Litowo-Polimerowej (pakiet Li-Po). W ogólności pakiet oznacza tyle, że mamy więcej ogniw zlutowanych ze sobą (wiele cel). Z uwagi na to, że większość baterii, które kupuje się do kopterów ma więcej, niż jedno ogniwo (np. 2S, 3S, 4S, 6S itd.), powszechnie stosuje się określenie właśnie "pakiet". Do długich lotów niektóre osoby zaczynają łączyć ze sobą baterie litowo-jonowe (np. typ 18650), więc równie dobrze można mówić o pakietach Li-Ion. Jeśli jednak nie dodaje się celowo typu, to większość rozumie przez "pakiet" baterię, którą zasilamy kopter.

Pass-through - Opcja ta pozwala skomunikować się jakiemuś zewnętrznemu urządzeniu np. ESC poprzez kontroler lotu z wykorzystaniem jego portu USB. Pass-through oznacza tyle, że dane są kierowane z portu USB wprost do docelowego urządzenia, przeźroczyście przenoszone przez to pośrednie. Dzięki tej opcji możemy zmieniać firmware ESC przez kabel USB podłączony do kontrolera lotu. Ten ostatni transparentnie pozwala komunikować się aplikacji BLHeli bezpośrednio z regulatorem obrotów i zmieniać ich oprogramowanie. Nie musimy już mieć niezależnego programatora i wlutowywać się w piny ESC, aby zmienić im oprogramowanie.
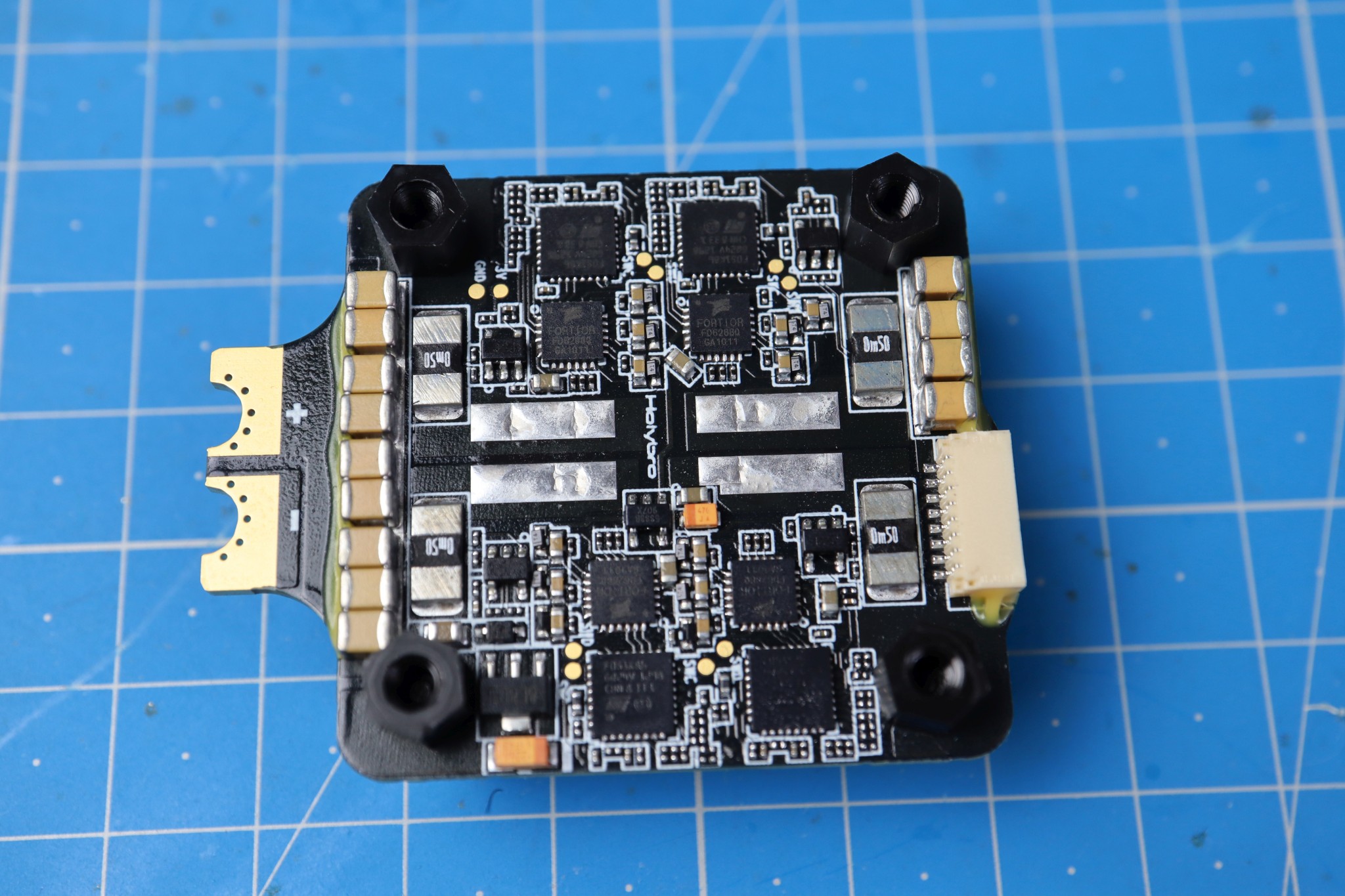
PDB (ang. Power Distribution Board) - płytka dystrybucji zasilania. PDB jest stosowana, aby podłączyć do niej baterię (po przylutowaniu złącza XT-60). Oprócz tego do PDB podłącza się zasilanie do ESC (jeśli stosujemy pojedyncze układy dla każdego silnika). Dodatkowo PDB najczęściej posiada też miernik prądu i napięcia oraz regulatory np. 5V i 12V w celu zasilania elektroniki. W początkach PDB służyły wyłącznie temu, aby spotkały się na niej wszystkie przewody zasilające z uwagi na to, że prąd z baterii należało rozprowadzić do poszczególnych ESC, jak również zasilić kontroler lotu, nadajnik FPV, kamerę czy odbiornik. Obecnie często PDB jest zintegrowana z ESC (regulatory obrotów) 4w1, lub kontrolerem lotu. W pierwszym przypadku moduł posiada wszystkie regulatory na jednej płytce, miejsce do dolutowania zasilania, oraz specjalne wielopinowe gniazdo do podłączenia do kontrolera lotu, którym otrzyma on zasilanie oraz sygnał z ESC, a czasem także telemetrię. Jeśli PDB została zintegrowana z kontrolerem lotu, to oprócz złącza zasilania, będzie on też miał odpowiednie pola lutownicze, do podłączenia pojedynczych ESC. Obecnie to drugie rozwiązanie jest nieco rzadsze.
PID, Pidy - jest to skrócone oznaczenie kontrolera PID (proporcjonalno-różniczkująco-całkującego), czyli algorytmu, którego zadaniem jest płynne sterowanie pewnym fizycznym układem, z wykorzystaniem danych podawanych w pętli sprzężenia zwrotnego. W świecie kopterów kontroler PID na wejściu otrzymuje sygnał z żyroskopu (oraz ew. także akcelerometru) oraz błąd (error), który oznacza odchylenie od żądanej wartości. Zadaniem kontrolera PID jest wyznaczenie kolejnej wartości sterowania (np. przyspieszenie jednego z silników) w celu skorygowania błędu. Jego ustawienie wpływa na to, jak będzie się zachowywał kopter w powietrzu. W coraz nowszych wersjach oprogramowania kontrolerów lotu (np. BetaFlight, czy EmuFlight) domyślne ustawienia są coraz lepsze przez co wiele osób nie potrzebuje zbyt wiele ustawiać. Tym niemniej ci, którzy zmierzają do możliwe stabilnego i płynnego lotu, korygują parametry kontrolera pod własne potrzeby. Kontroler PID bazuje na 3 podstawowych wartościach: P, I oraz D. "P" (Proportional - Proporcjonalna) odpowiada za to, jak mocno kopter zareaguje w zależności od wielkości błędu. Im większe P, tym mocniej i gwałtowniej kopter spróbuje np. wejść w obrót, albo się zatrzymać. Zadaniem parametru D (Derivative - Różniczkujący) jest wygładzenie reakcji P, która może wprowadzać kopter w oscylacje wynikające z niemożności dojścia do błędu wynoszącego 0. Przy zbyt dużym P kopter może cały czas mijać punkt 0 i wtedy D stłumi jego działanie na tyle, żeby wygładzić, ustabilizować kopter w danej pozycji. Wreszcie I (Integral - całkujący) odpowiada za osiągnięcie punktu 0, jeśli utrzymuje się on przez dłuższy czas, a P i D nie są w stanie go skasować. Innym ciekawym wyjaśnieniem parametrów PID jest ujęcie, w którym mówi się, że P reaguje na bieżącą wartość błędu, D na to, co za chwilę się wydarzy (wyliczoną wartość wynikającą z P), natomiast I jest zawieszone w przeszłości, ponieważ zbiera zakumulowaną wartość przez dłuższy czas i na tej podstawie podejmuje decyzję.
Pigtail - jest to krótki przewód antenowy, który służy jako elastyczna przedłużka, bądź adapter jednego złącza na drugie. Najczęściej spotkamy je w nadajnikach FPV. Do sztywnego gniazda w nadajniku wpina się pigtail, który jest elastyczny i pozwala się ułożyć wewnątrz kadłuba, jak również wyprowadzić gniazdo antenowe w dogodnym miejscu. Pigtail jest stosowany również po to, aby w razie rozbicia koptera zabezpieczyć gniazdo w nadajniku. Jeśli zdarzy się nam wyrwać antenę, to pigtail powinien przejąć część uderzenia i nie pozwolić na to, żeby zostało uszkodzone gniazdo antenowe - dużo łatwiej jest wtedy naprawić kopter, niż wymienić cały nadajnik.

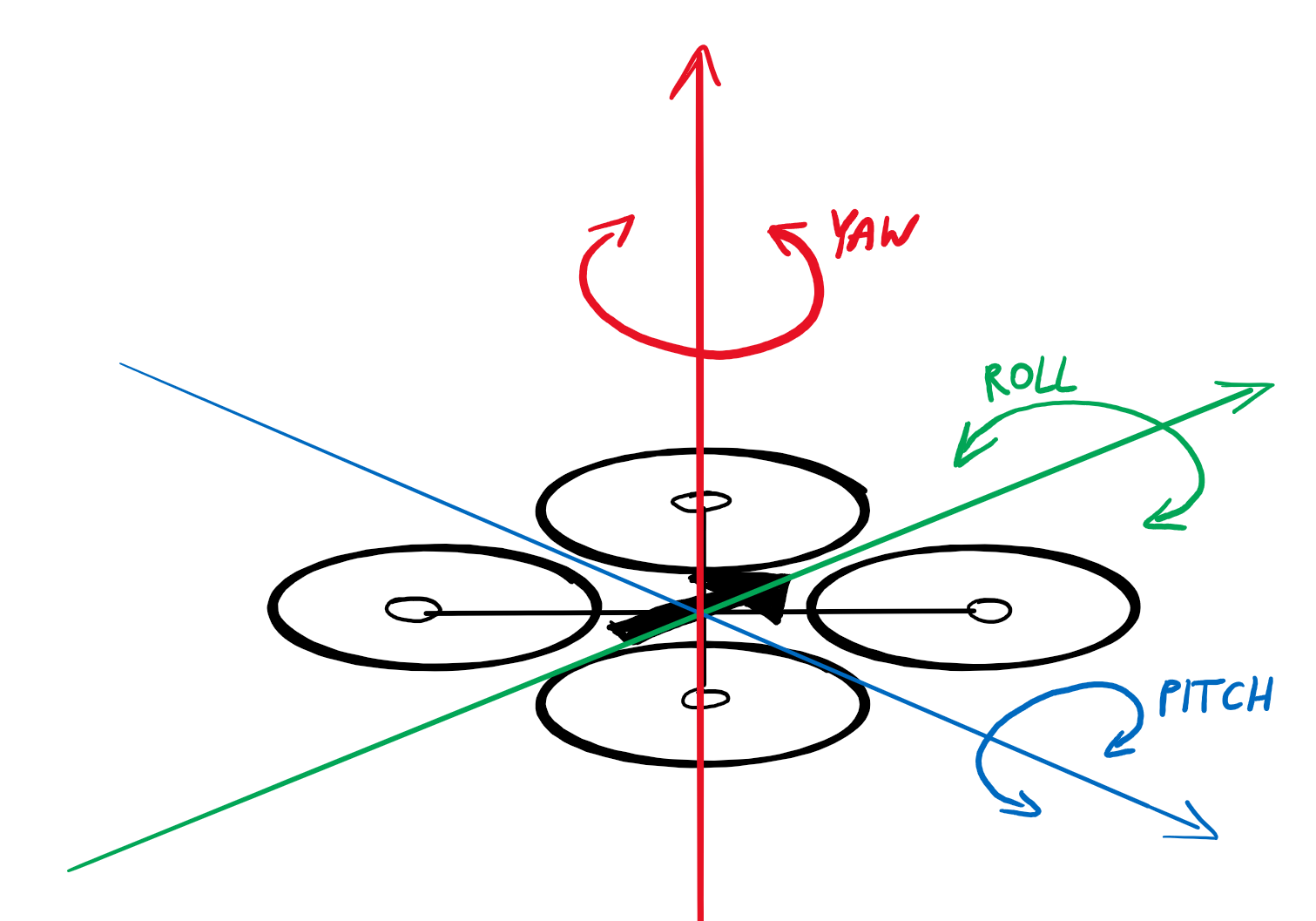
Pitch - jedna z osi obrotu koptera i ogólnie sprzętu latającego. Pitch to po polsku "pochylenie". Określa ono jak mocno kopter jest pochylony w przód lub tył. W przypadku aparatury Mode 2 (gaz po lewej stronie), za "pitch" odpowiada prawy manipulator i jego ruch przód-tył. Pozostałe osie obrotu to Yaw i Roll.
PNF (ang. Plug'n'Fly) - Oznaczenie stosowane najczęściej dla modeli złożonych, ale bez odbiornika. Oznacza to, że w pierwszej kolejności musimy dokupić odbiornik, jak również posiadać zgodną z nim aparaturę. Model PNF od BNF odróżnia właśnie brak odbiornika. Niektóre modele mogą być sprzedawane z baterią, inne bez - tutaj również warto doczytać opis.
Polaryzacja (anteny) - Oś, w jakiej odbywają się zmiany pola magnetycznego emitowanego przez antenę. W przypadku anteny liniowej jest to sinusoida drgająca w jednej tylko osi, czyli polaryzacja liniowa. Nic nie stoi jednak na przeszkodzie, aby zmiana rozchodziła się w dwóch osiach, czego przykładem jest helisa, czyli śrubokształtny ruch. Jeżeli skręca ona ciągle w prawo (zgodnie z ruchem wskazówek zegara) to mówimy o polaryzacji kołowej w prawo (RHCP), zaś przeciwnie to LHCP (Left-Handed Circular Polarization).
Position Mode - jeden z trybów lotu w kopterach DJI, który wykorzystuje nie tylko stabilizację lotu z użyciem akcelerometru, ale także pozycjonowanie GPS i barometryczne utrzymanie wysokości. W tym trybie dron utrzymuje stałą pozycję w powietrzu, a więc nie tylko nie przemieszcza się w poziomie, ale także utrzymuje stały pułap.
PPM (ang. Pulse Position Modulation) - sposób wysyłania sygnału cyfrowego, który bazuje na regulacji długości impulsu. Im dłużej dany stan się utrzymuje, tym wyższa wartość sygnału. Im krótszy, tym niższa wartość.
PWM (ang. Pulse Width Modulation) - sposób wysyłania sygnału, który opiera się o użycie impulsów o stałej długości, ale opóźnianiu ich w czasie. Im później pojawia się dany impuls, tym wyższa jest wartość, którą ma odczytać odbiornik. W odróżnieniu od PWM tutaj impuls ma stałą długość (jest bardzo wąski), ale liczy się mocno synchronizacja zegarów nadajnika i odbiornika. Ten ostatni liczy, jak długi jest czas minął od momentu, kiedy sygnał mógłby się pojawić, do momentu, kiedy się pojawi. Im dłużej czeka, tym większa wartość, którą wysyła nadajnik.
R9 - rozwiązanie long-range (do lotów dalekich) od FrSky. Firma w odpowiedzi na TBS CrossFire wypuściła swoje własne moduły nadawcze do aparatur (R9M i R9M Lite) i odbiorniki. Urządzenia z serii R9 działają na częstotliwościach 900MHz i 868MHz, w odróżnieniu od standardowego modułu w aparaturach FrSky obsługującego zakres 2.4GHz. Niższe częstotliwości mają lepszą przenikliwość i inne normy związane z mocą nadawczą, co przekłada się na dużo lepszy zasięg, w jakim możemy bezpiecznie kontrolować model. Ceną są większe anteny i konieczność kupienia takiego zestawu osobno.

RaceBand - jeden z podziałów pasma 5.8 GHz, specjalnie dedykowanego pod kątem wyścigów. Ideą była możliwie duża separacja częstotliwości pomiędzy kanałami, tak aby w jak najmniejszym stopniu na siebie nachodziły.
RapidFire - jeden z popularniejszych (ale i droższych) odbiorników do gogli FPV. Opracowany przez firmę ImmersionRC. Jest to odbiornik diversity (wykorzystujący sygnał z więcej, niż jednej anteny), a jego cechą charakterystyczną jest to, że przy pomocy odpowiednich algorytmów, próbuje poprawiać odbierany sygnał. W rezultacie uzyskujemy obraz, który ma mniej zakłóceń, w warunkach gdy inne odbiorniki mogą sobie radzić lepiej. Pierwszym takim rozwiązaniem na rynku było ClearView. Alternatywy to m.in. OwlRC Receiver, FuriousFPV Achilles.

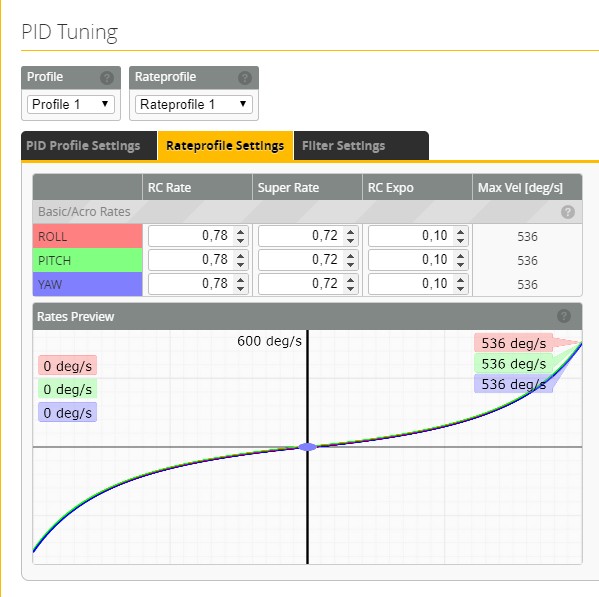
Rate, Rates - jest to funkcja, która definiuje, jak szybko nasz kopter będzie się obracał w danej osi w zależności od stopnia wychylenia manipulatora. Najczęściej piloci ustawiają Rates, jako nieliniowe, co oznacza, że przy niewielkim wychyleniu reakcja jest łagodna i precyzyjna, podczas gdy w skrajnych pozycjach prędkość obrotowa sięga nawet 1100 stopni na sekundę. Rates wyrażamy właśnie w tej jednostce - stopnie na sekundę. Mówię, że to funkcja, ponieważ dla każdego poziomu wychylenia manipulatora mamy dokładnie określoną zadaną prędkość kątową. Rates konfigurujemy dla każdej osi z osobna: roll, pitch i yaw. Możemy mieć więc inny stopień reakcji na wychylenie prawego manipulatora w przód niż w bok. Na wynikowy Rate składają się 3 parametry (różnie nazywane). Jeden z nich to RC Rate - liniowa i proporcjonalna reakcja w całym zakresie. Im większa, tym proporcjonalnie szybciej nasz kopter będzie się obracał im mocniej wychylimy manipulator. Osobnym ustawieniem jest Super Rate, który obejmuje wyłącznie końcówkę zakresu, czyli skrajne wychylenia. Zwiększamy go, gdy chcemy wykonać błyskawiczny obrót ciągnąc manipulator do maksimum w danej osi. Ostatnią częścią jest Expo, czyli wypłaszczenie funkcji w najmniejszym zakresie wychyleń. Expo ustawiamy, aby zapewnić sobie bardzo gładką, delikatną reakcję, przy niewielkich ruchach manipulatora (lub, żeby zminimalizować wpływ nieznacznych ruchów palców). Ustawienie tych 3 parametrów daje nam wynikowy Rate, czyli nieliniową funkcję, która określi, jak szybko kopter będzie się obracał w danej osi, zależnie od tego, jak mocno wychylimy manipulator.
"Regiel" - skrócona nazwa na regulator obrotów. Patrz: ESC
RF - skrót stosowany powszechnie dwojako. Kiedyś oznaczał RaceFlight, czyli oprogramowanie dla kontrolerów lotu, z którego zrodziło się Flight One. Obecnie częściej przyjmuje się, że chodzi o odbiornik do gogli FPV - RapidFire. Patrz: RapidFire.
RHCP (ang. Right Hand Circular Polarization) - oznaczenie polaryzacji kołowej prawoskrętnej. Dla pilotów FPV istotne jest to, że anteny tego typu stosujemy po obu stronach, czyli np. RHCP w kopterze, oraz w goglach, które odbierają sygnał. Sygnał o takiej polaryzacji wynikowo daje mniej zakłóceń przy odbiciach i opóźnieniu transmisji, ponieważ antena "odrzuca" sygnał o przeciwnej polaryzacji. Tego typu rozwiązanie pozwala też separować sygnały z anten RHCP nawet na zbliżonych kanałach, ponieważ antena jednej polaryzacji w dużej mierze "wycina" drugą z nich. Anteny o polaryzacji kołowej są chętniej używane niż anteny liniowe, które są prostsze, ale prezentują nieco gorsze parametry, szczególnie jeśli mówimy o transmisji sygnału wideo.
Roll - oznacza jedną z 3 osi obrotu pojazdu latającego. Roll to obrót wzdłuż osi wzdłużnej, czyli wychylenie w lewo lub w prawo. W przypadku samolotu byłoby to wychylenie na skrzydło, natomiast w świecie kopterów oznacza to lot w bok - lewo lub prawo.
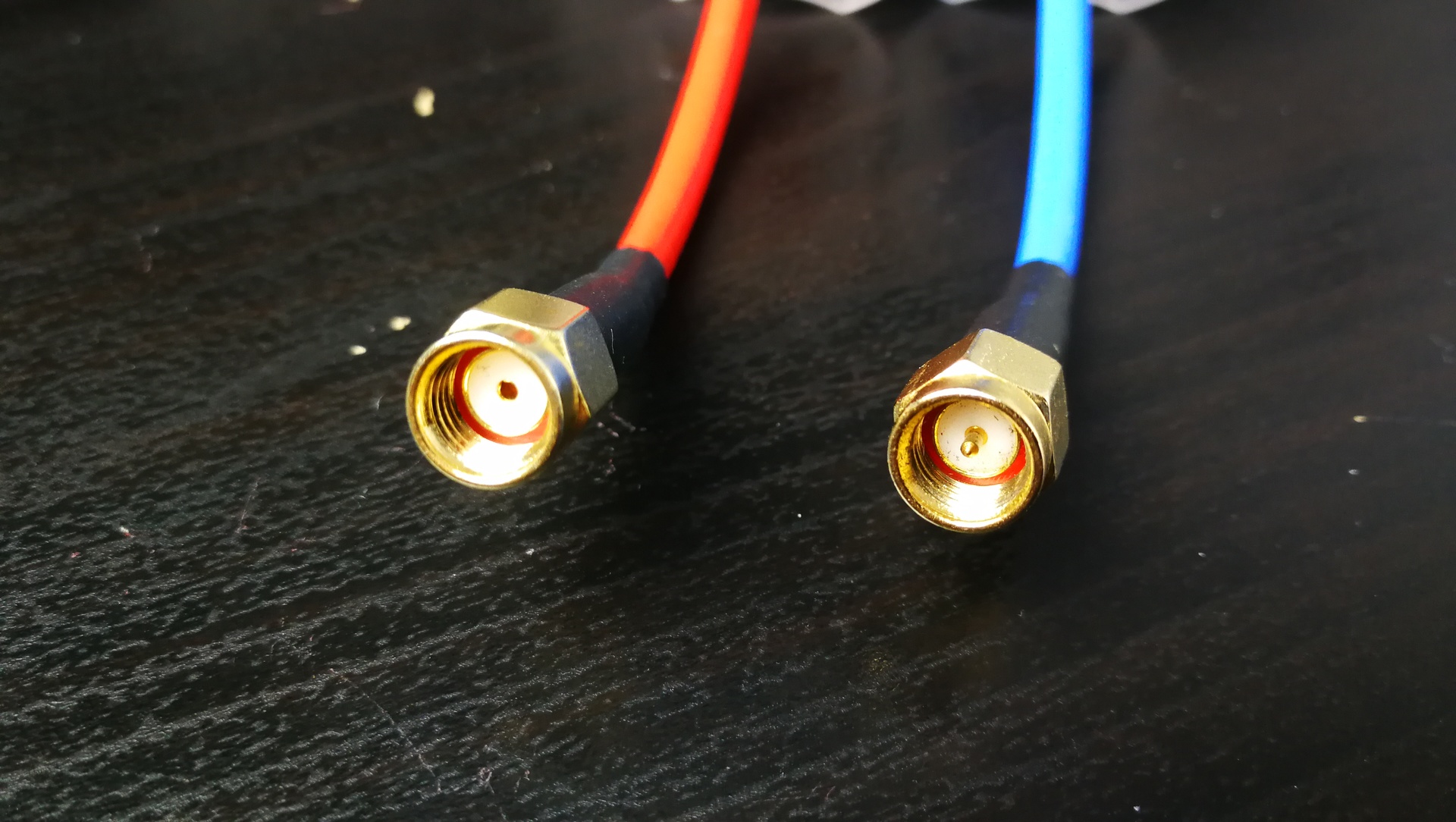
RP-SMA - złącze antenowe będące niejako lustrzanym odbiciem złącza SMA. Ma dokładnie te same gwinty i średnice, ale w RP-SMA bolec występuje w złączu żeńskim (RP-SMA Female), zaś otwór pojawia się w złączu męskim (RP-SMA Male). Jest to równorzędny standard do SMA, jednak nie można ich mieszać z uwagi na to, że albo obie strony miałyby bolce w swoim złączu (i wyłamalibyśmy je przy skręcaniu), albo też po obu stronach byłby otwór (nie dający połączenia). Wiele nadajników przeszło już na mniejsze standardy np. MMCX lub u.fl, ale często producencie dodają przejściówkę na SMA, rzadziej na RP-SMA. Zdarza się, że ten ostatni pojawia się w goglach i modułach odbiorczych.
RTF - Ready To Fly. Oznaczenie modeli zdalnie sterowanych, które są kompletne - gotowe do lotu. W przypadku dronów model RTF będzie zawierał aparaturę do sterowania oraz baterię i ładowarkę. Jeśli jest to model FPV (patrz: FPV) to dodatkowo w zestawie powinny być gogle pozwalające nam oglądać obraz z kamery.
RX - jest to skrót od angielskiego "Receive" albo "Receiver". W przypadku złącza UART oznacza stronę odbierającą sygnał. Wtedy do RX lutujemy przewód, który z drugiej strony wchodzi do TX, czyli strony nadawczej. Zdarza się też, że RX może być potraktowane jak skrótowe oznaczenie odbiornika, czyli całego układu, który odpowiada za odbiór sygnału z aparatury. Zależy to od kontekstu, ale rozumiejąc, że chodzi o stronę odbiorczą - łatwo jest ustalić, które ze znaczeń przypisać. Na ogół chodzi o to pierwsze.
siać, sianie - na pewno zdążyliście usłyszeć, że nadajnik FPV "sieje". W idealnych warunkach, po ustawieniu na nadajniku danej częstotliwości (np. kanał Raceband 5 - 5806MHz), sygnał powinien być wyłącznie na niej. Oznacza to, że osoba latająca na 5840MHz, albo 5745MHz nie powinna w ogóle mieć zakłóceń spowodowanych naszym ustawieniem. Niestety, tanie i niskiej jakości nadajniki FPV mają to do siebie, że nie potrafią trzymać się idealnie częstotliwości na której nadają i sygnał "rozlewa" się na sąsiadujące również. Powoduje to, że trudniej jest z nami latać, bo dobranie częstotliwości w taki sposób, aby piloci sobie nie zawadzali jest trudniejsze, gdy jeden z nadajników zakłóca także pasma, na których nie nadaje. Niektóre urządzenia potrafią też na moment spowodować zakłócenia w szerokim zakresie częstotliwości podczas podłączania zasilania, albo zmiany kanału. Z wyżej wymienionych względów na wyścigach dopuszcza się jedynie 3 producentów: TBS (modele Unify), ImmersionRC (Tramp) oraz FuriousFPV (Stealth).
"Szczotka" - skrócona nazwa silnika szczotkowego. Patrz: Silnik Szczotkowy
Silnik bezszczotkowy - od silnika szczotkowego odróżniają go 2 podstawowe elementy. Pierwszym jest oczywiście brak szczotek i komutatora. Drugim, użycie 3 przewodów, które do niego wchodzą, zamiast dwóch. Wynika to ze sposobu sterowania obrotami. Silnik bezszczotkowy jest wprawiany w ruch prądem przemiennym o 3 fazach, który wzbudza kolejne części uzwojenia nawiniętego na stojan. Zmieniające się pole magnetyczne odpycha magnesy przyklejone do wirnika i rozpędza silnik. Zasadniczą różnicą jest to, że silnik bezszczotkowy potrzebuje urządzenia, które przyjmie prąd stały i zamieni na 3 fazy prądu zmiennego. Przy tym wymaga jednak układu, który będzie sterował podawaniem kolejnych faz, zmianą częstotliwości itd., ponieważ musi on także sterować prędkością obrotową. Tym urządzeniem jest ESC, czyli elektroniczny regulator obrotów. Silnik bezszczotkowy pracuje więc wyłącznie w tandemie z ESC, z czego każdy motor potrzebuje osobnego układu. Warto zauważyć, że silniki bezszczotkowe mają niewielkie straty i potrafią wykrzesać z siebie ogromną moc, dlatego też coraz więcej kopterów lata właśnie na nich. Obecnie spotykamy się nawet z miniaturowymi silnikami bezszczotkowymi do TinyWhoopów z uwagi na coraz większą integrację i miniaturyzację elektroniki, która pozwala "upchać" na jednej płytce 4 ESC i sam kontroler lotu.

Silnik szczotkowy - jednostka stosowana w najmniejszych i najtańszych, często zabawkowych kopterach. Najczęściej będzie on w srebrnej, metalowej obudowie, która od wewnątrz będzie miała wklejone magnesy. Przez jej środek będzie z kolei przechodzić ośka z wirnikiem i nawiniętym na stojan uzwojeniem. Prąd, który przez to ostatnie popłynie, powoduje powstanie pola magnetycznego, które odepchnie wirnik i w rezultacie wprowadzi ośkę w ruch wirowy. Aby silnik się obracał, potrzebne jest zmienne pole magnetyczne. Zmiana pola następuje poprzez obrót wału i stykanie się komutatora ze szczotkami. Silnik szczotkowy ma zawsze tylko dwa przewody, a regulacja jego obrotów odbywa się poprzez sterowanie przepływem prądu przez tranzystor. Tego typu silniki są tanie i proste w sterowaniu, co powoduje, że są szeroko używane w tanich kopterach. Droższe modele (i te wymagające wyższej mocy) używają jednostek bezszczotkowych.

SMA - typ złącza antenowego, które charakteryzuje się dość szerokim gwintem i powszechnie pojawia się zarówno w aparaturach, jak i nadajnikach FPV. Występuje w wersji męskiej (SMA Male), czyli zewnętrznej nakrętki i bolca w środku, jak i pasującej - żeńskiej (SMA Female), która to składa się z zewnętrznego gwintu i otworu. Niejako lustrzanym odbiciem SMA jest RP-SMA i mimo, iż da się przykręcić anteny jednego typu do drugiego gniazda, to nie będzie to działać jak należy.
Soft Mount - oznacza mocowanie danego elementu koptera na miękkiej podstawie, która ma tłumić wibracje. W przypadku silników są to gumowe, lub piankowe podkładki, z kolei kontrolery lotu montuje się na O-ringach (gumkach) pod śruby. Wszystkie te zabiegi mają na celu wyeliminowanie wibracji, które przenoszą się na żyroskop. Oczywiście z takimi radzą sobie także później filtry zaimplementowane w oprogramowaniu, ale im mniej ich jest, tym mniej filtrowania można stosować. Jest też większa pewność, że kopter będzie stabilnie latał i łatwiej będzie poustawiać parametry typu PID, filtry itd.

Stub, Stubby - oznaczenie bardzo krótkiej anteny, która właściwie nie ma przewodu, tylko gniazdo jest przylutowane bezpośrednio do niej samej. Anteny typu stubby są stosowane szczególnie chętnie w kopterach wyścigowych i wszędzie tam, gdzie antena powinna być schowana w obrysie kadłuba.

SWR - (ang. Standing Wave Ratio) - współczynnik fali stojącej, czyli numeryczne określenie, jaka część mocy sygnału zostaje wypromieniowana przez antenę w stosunku do odbitego, czyli wracającego do urządzenia. W idealnym przypadku wynosiłby 1.0, czyli nie byłoby żadnej straty mocy w urządzeniu nadawczym i antenie. Producenci, którzy mierzą anteny przed sprzedażą, dodają ulotki, bądź naklejki określające wynik pomiaru SWR dla różnych zakresów częstotliwości, abyśmy mogli optymalnie wykorzystać jej parametry. Tak robi m.in. Actuna.
Taranis - nazwa serii aparatur produkowanych przez FrSky. Są to jedne z popularniejszych wyborów, stąd zostały tutaj wspomniane. Taranisy mają przedstawicieli w linii X-Lite (także Pro, podobne do padów konsolowych), QX7 (linia pośrednia przed X9) i wreszcie X9 (X9 Lite, X9D, X9D+). Osobną linią produktową FrSky jest Horus.
TBS - Team BlackSheep to producent sprzętu do lotów FPV. Najbardziej znanymi i popularnymi są TBS Unify (nadajnik FPV) oraz TBS Crossfire (moduł nadawczy i odbiornik do lotów dalekiego zasięgu na częstotliwości 868MHz i 900Mhz). Oprócz tego TBS dysponuje też ramą TBS Oblivion, sprzedaje TinyWhoopy i ma trochę produktów np. we współpracy z Ethix.
Telemetria - przekazywanie danych pomiarowych na odległość. W świecie kopterów mówimy o przesyłaniu do aparatury informacji o sile odbieranego sygnału (RSSI), napięciu baterii, chwilowym prądzie, czy pozycji GPS. Telemetrię mogę też udostępniać regulatory obrotów (ESC) - tutaj byłaby to na przykład ich temperatura, czy pobierany prąd. W telemetrii chodzi o to, że dane i chwilowe parametry koptera możemy odbierać zdalnie i wyświetlać je na ziemi. Tak samo do telemetrii zalicza się wskazanie wysokości i kierunku świata wyświetlane na OSD w goglach, albo na ekranie, który pozwala nam na podgląd obrazu z kamery.
Throttle - gaz, przepustnica. Sterowane lewym manipulatorem (w Mode 2) w górę i w dół powoduje proporcjonalne zwiększenie i zmniejszenie obrotów silników, a wraz z tym unoszenie lub opadanie. Throttle, jako kanal sterowania jako jedyny nie jest sterowany przez kontroler PID, tylko wartość przepustnicy jest przekładana bezpośrednio na silniki - zwiększając, lub zmniejszając ich obroty.
TinyWhoop - seria miniaturowych kopterów FPV zapoczątkowana przez produkt o tej samej nazwie. Oryginalnie TinyWhoopy miały miniaturowe silniki szczotkowe (na ogół typ: 615 lub 617), śmigła o średnicy 31mm, polipropylenową ramę i nadajnik FPV zintegrowany z kamerą. To też jedne z pierwszych rozwiązań z cieniutkim, opływowym kadłubem. Po tym, jak TinyWhoop okazał się sukcesem, wielu innych producentów zaczęło produkować swoje odmiany i pojawiła się cała kategoria "Whoop", ponieważ koptery zaczęły rosnąć. Obecnie miniaturowe koptery ze śmigłami poniżej 2 cali, z jednolitą miękką ramą, która ma tunele w celu zwiększenia ciągu, kategoryzuje się właśnie jako Whoopy, lub TinyWhoopy.

Toothpick - jest to kopter oryginalnie wymyślony przez vloggera KababFPV. Poskładał on bardzo lekki kopter (okolice 60 gramów) z bezszczotkowymi silnikami na ramce z włókna węglowego o niezwykle cienkich ramionach. Konstrukcja została sparowana ze śmigłami 2-płatowymi 65mm i na mocowaniu z drukarki 3D została osadzona kamera oraz nadajnik FPV. Cała konstrukcja nawet na pakiecie 1S latała bardzo dynamicznie, więc temat dość szybko chwycił i kolejne osoby zaczęły konstruować własne wariacje na temat Toothpicka. Podchwyciły to również firmy i obecnie mamy wiele różnych konstrukcji (mniejszych i większych), które kwalifikują się do tej kategorii. W ogólności mówi się o tym, że Toothpicki mają śmigła poniżej 3 cali (65mm, 60mm), oraz lekkie ramy typu X. Charakterystyczne są też miniaturowe silniki nie przekraczające rozmiaru 110X, choć obecnie trafiają się też 130X. Koptery te plasują się pomiędzy tzw. CineWhoopami, a TinyWhoopami.

TPA (ang. Throttle PID Attenuation) - jest to proporcjonalne zmniejszanie wartości PID wraz ze zwiększaniem throttle (przepustnicy, gazu - jak zwał, tak zwał). Kopter podczas lotu jest stabilizowany na bazie wskazań z kontrolera PID (funkcji, która na wejściu pobiera bieżące wskazanie żyroskopu i oczekiwaną wartość, zaś na wyjściu decyzję o tym, co zrobić z poszczególnymi silnikami). Jego parametry są dobierane przy relatywnie niewielkim wychyleniu lewego manipulatora. Gdy jednak dodamy mocno gazu, reakcja pętli PID staje się często niepoporcjonalnie wysoka, co może wprowadzić kopter w oscylacje (w uproszczeniu - trzęsienie). Aby temu zapobiec, kontroler lotu może proporcjonalnie zmniejszać wartości parametrów PID zależnie od stopnia otwarcia przepustnicy (czyli wychylenia manipulatora sterującego throttle właśnie).
Trymer, Trym (ang. Trim) - przyciski położone wokół manipulatorów na aparaturze, służące korekcie sygnału wysyłanego przez nią przy neutralnym położeniu drążków. Gdyby się okazało, że kopter samoczynnie, minimalnie ucieka w danym kierunku, możemy to poprawić i "wycentrować" położenie bez potrzeby podłączania koptera do komputera. Trymowanie jest, jak już wspomniałem, korektą sygnału wysyłanego przez aparaturę. Oznacza to, że trym jest odpowiednikiem delikatnego, stałego przechylenia manipulatora w danym kierunku. W tanich, prostych kopterach jest to jedyny sposób wyrównania lotu drona w zawisie. Ustawienie trymów jest zapamiętywane w aparaturze, więc nie trzeba tej korekty wprowadzać za każdym razem.

Tune, Tuning - angielskie określenie zmiany parametrów kontrolera lotu w celu uzyskania oczekiwanego zachowania w powietrzu. W ogólności jest to dobór parametrów PID, ustawień filtrów, TPA, Feed-Forward itd. Każdy kontroler lotu ma nieco inny zestaw opcji, ale poprawne ich ustawienie powinno dawać pożądane zachowanie koptera. Oczywiście, tune może być inny dla koptera wyścigowego (racing tune), a inny dla Freestyle, jeszcze inny dla CineWhoopa, który ma po prostu się nie trząść podczas lotu.
Turtle mode - jest to dodatkowy tryb, który możemy włączyć, gdy kopter leży do "góry nogami". Zamiast uzbrajać kopter, w zamian wykorzystujemy prawy manipulator, aby uruchomić tylko dwa z nich, ale działające w przeciwną stronę niż zwykle. to powoduje powstanie ciągu, który odpycha jedną stronę koptera od ziemi i potrafi przewrócić go z powrotem, aby był gotowy do lotu. Wielokrotnie może to oszczędzić chodzenia po kopter, a także uprościć jego ściągnięcie z drzewa. Może też popalić ESC, jeśli silnik jest zblokowany. Cóż, ryzyko wkalkulowane. Warto napisać, że Turtle mode wymaga protokołu DSHOT, ponieważ wykorzystuje specjalną komendę, aby tymczasowo odwrócić kierunek pracy silników.
TX (ang. Transmit / Transmitter) - jest to oznaczenie strony nadawczej w procesie wysyłania danych. Używa się tego dwojako. Albo jako oznaczenie pinu na kontrolerze lotu, który odpowiada za nadawanie sygnału w ramach jednego z portów UART; albo też jako nadajnik - np. moduł w aparaturze.
VTX - (ang. Video Transmitter) - skrótowe określenie nadajnika FPV, który używany jest w kopterach do wysyłania obrazu pochodzącego z kamery.
VLOS (ang. Visual Line Of Sight) - lot w zasięgu wzroku. W przypadku dronów oznacza to sterowanie kopterem w odległości nie większej, niż jesteśmy go w stanie zobaczyć i efektywnie nim kierować. Co prawda niektórzy dyskutują, co to oznacza, ale według definicji mówimy o nieuzbrojonym oku (bez lornetki i sprzętu przybliżającego obraz). Oczywiście bierze się tutaj również ograniczenia danej jednostki, ponieważ każdy widzi nieco inaczej. W ogólności chodzi jednak o to, że jeśli sterujemy kopterem korzystając z podglądu kamery, ponieważ fizycznie go nie widzimy, to lot staje się VLOS, czyli poza zasięgiem wzroku. Zgodnie z przepisami (stan na koniec roku 2019) możemy jednak mieć też obserwatora i jeśli my (sterujący) lub inna, współpracująca z nami osoba, widzi kopter, to pozostajemy w sferze VLOS. Lot w goglach na twarzy z definicji jest lotem BVLOS, z uwagi na to, że fizycznie nie obserwujemy koptera (nie mamy w końcu jak), co jednak nie wyklucza ponownie posiadania dodatkowego obserwatora. Uwaga: Przepisy wciąż się zmieniają, więc zachęcam do szukania aktualnej wykładni, gdyż powyższa mogła już ulec zmianie.
X9D - bardzo popularny model aparatury serii Taranis od FrSky. Wydany wiele lat temu, ale wciąż wielu pilotów z niej korzysta.

X-Lite - również aparatura serii Taranis od FrSky. Jej charakterystyczną cechą jest kształt, który przypomina kontroler od konsoli (np. XBoxa). X-Lite doczekał się już drugiej generacji, która składa się z modelu "S" oraz "Pro".

XF - Patrz: TBS Crossfire
XM - seria odbiorników od FrSky, których cechą są niewielkie rozmiary oraz brak telemetrii. XM to odbiornik mniejszego zasięgu, z pojedynczą anteną do najmniejszych kopterów. XM+ ma dwie anteny i obsługuje pełny zasięg deklarowany przez FrSky (tzw. full range receiver). Odpowiednikami tego ostatniego, które ma telemetrię są XSR oraz R-XSR.
XT-30, XT-60, XT-90- oznaczenie najpopularniejszych złączy bateryjnych stosowanych w kopterach FPV. Mniejszy numer oznacza też mniejszą wtyczkę. Samo złącze jest najczęściej zółte i asymetrycznie ścięte, dzięki czemu nie można podłączyć baterii odwrotnie (zamiana polaryzacji), co skończyłoby się spaleniem podzespołów.
XSR, R-XSR - dość popularne modele odbiorników produkowane przez FrSky. Ich cechą wspólną są dość niewielkie rozmiary, ale w odróżnieniu od XM i XM+ mają one telemetrię, a więc wysyłają informację m.in. o mocy odbieranego sygnału, ale przede wszystkim poprzez SmartPort pozwalają na zmianę wielu ustawień koptera poprzez skrypty napisane w języku LUA, które obsługują aparatury z oprogramowaniem OpenTX.
Yaw - jest pionową osią obrotu koptera, po polsku określaną jako "odchylenie". W lotnictwie yaw byłby sterowany orczykiem i umożliwiał skręcanie bez wychylenia bocznego. W kopterach jest podobnie - yaw to obrót wokół pionowej osi, bez przechylania pojazdu. W aparaturach Mode 2 jest sterowany lewym manipulatorem w osi poziomej. Koptery (drony) nie posiadają usterzenia, ale oznaczenia wciąż pochodzą z lotnictwa, więc po stronie aparatury za sterowanie Yaw odpowiada "Aileron", czyli po polsku - orczyk. Pozostałe osie obrotu to Pitch i Roll.
Żyroskop - jest to czujnik, który podaje prędkość kątową we wszystkich 3 osiach. W przypadku koptera jest niezbędny, aby ten w ogóle latał, ponieważ dzięki niemu kontroler lotu móże ocenić, którym silnikiem, w jaki sposób pracować, by kopter utrzymywał stałe pochylenie. Funkcja żyroskopu i akcelerometru często jest mylona. Ten pierwszy odpowiada na pytanie - "czy kopter się obraca, a jeśli tak - w którym kierunku i jak szybko?". Żyroskop nie podaje natomiast informacji o tym, jak w stosunku do ziemi ustawiony jest kopter. Tą informację dostarcza akcelerometr, który to z kolei jest w stanie odpowiedzieć na pytanie, czy dron jest przechylony w którąkolwiek stronę, ale z kolei nie wie, czy wciąż się obraca, czy też nie.
{kind=link}