Uwaga! Ten wpis powstał już spory czas temu i obecne metody składania kopterów zmieniły się dość znacznie! Poszukaj proszę bardziej aktualnego artykułu. https://4smigla.pl/jak-nie-skladac-koptera-w-2019-roku/
Pamiętam, że nawet po tym, jak sporo poczytałem na temat budowy quadrocopterów, podstawowe pytanie, na które nie mogłem znaleźć odpowiedzi to w jaki sposób zasilić kontroler lotu. Znałem już wszystkie części i rozumiałem, co poszczególna z nich robi, ale musiałem się naoglądać sporo diagramów, żeby zrozumieć jak połączone są ze sobą poszczególne komponenty. Żebyśmy mogli wchodzić w szczegóły dotyczące budowy, chciałbym zacząć od omówienia poszczególnych elementów, ale już w kontekście ich użycia w naszym modelu.
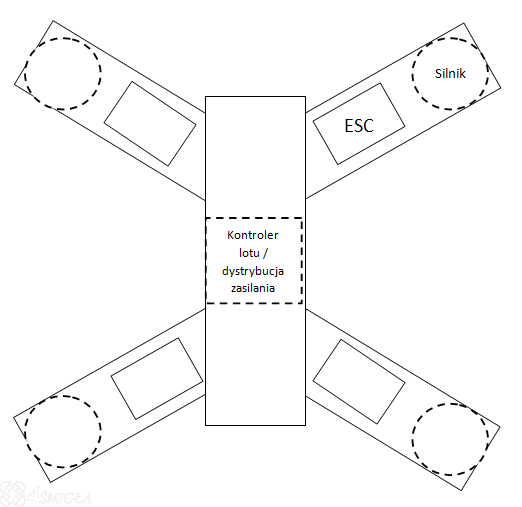
Rama
Pierwszym elementem, który bierzemy do ręki jest rama. Stanowi ona szkielet całości i choć można ją oczywiście stworzyć samodzielnie, na początku lepiej oprzeć się o mnogość rozwiązań, które dostępne są w sklepach. Każda rama składa się z części centralnej, na której umieścimy kontroler lotu, odbiornik RC, a także tzw. dystrybucję zasilania, czyli punkt styku wszystkich części, które muszą być zasilane z baterii. O tym powiem w dalszej części.

Ponadto rama składa się z ramion, które albo będziemy do niej przykręcać, albo też będzie ona monolityczna i będą one scalone z płytą centralną. Na końcu każdego z nich znajdują się otwory montażowe, do których przykręcimy silniki.

Silnik bezszczotkowy
Jednostka bezszczotkowa pracuje w oparciu o zmienne pole magnetyczne, które jest generowane przez prąd płynący przez uzwojenia. Silniki, z którymi będziecie mieli kontakt mają w sumie 3 fazy, każda z nich doprowadzona osobnym przewodem. Z tego powodu każdy silnik, który wybierzecie będzie miał 3 przewody, które z niego wychodzą. Łączą się one z analogicznymi 3 przewodami wychodzącymi z ESC.

Regulator obrotów (ang. ESC - Electronic Speed Controller)
ESC potocznie zwany u nas reglem zgodnie z rozwinięciem swojej nazwy odpowiada za rozpędzanie i hamowanie silnika zgodnie z podanym sygnałem sterującym pochodzącym z kontrolera lotu. Już wiemy, że na wyjściu, po jednej z jego stron znajdują się trzy identyczne przewody, które podłączamy do silnika. Z drugiej strony na ogół będziemy mieli jedną 3-pinową wtyczkę oraz dwa przewody - czarny i czerwony. Tymi ostatnimi doprowadzamy prąd do ESC bezpośrednio z baterii. Oczywiście połączenia są zgodne kolorystycznie, czyli (+) z baterii (przewód czerwony) podłączamy do takowego w ESC. Biegun (-) łaczymy przewodami koloru czarnego. ESC wykorzystuje połączenia z baterią dwojako. Po pierwsze pobiera z niej prąd stały, który następnie zamienia na zmienny i kieruje go na silniki. Po drugie ESC ma regulator napięcia (BEC), który zamienia napięcie baterii (np. 11.1V z 3S) na 5V potrzebne do zasilania elektroniki. Każdy regulator obrotów ma w parametrach ograniczenie odnośnie maksymalnego napięcia, które jest w stanie sprowadzić do 5V.

Przewód wychodzący z ESC ma 3 piny (ten na zdjęciu ma 2 - o tym też będzie) i podłączamy go do kontrolera lotu, zgodnie z kolejnością silników, która jest określona w oprogramowaniu. Biały przewód w tym przypadku będzie doprowadzał sygnał sterujący. To w ten sposób kontroler lotu informuje ESC, jak szybko ma kręcić się silnik. Oprogramowanie regulatora następnie przetwarza ten sygnał na prąd zmienny, który trafia bezpośrednio na silnik. Ważna w tym przypadku jest kalibracja ESC tak, aby każde z nich reagowało na sygnał w ten sam sposób, ale o tym jeszcze będę pisał.
Dwa pozostałe przewody w 3-pinowym złączu to zasilanie 5V, które dostarczy prąd do kontrolera lotu. Tak, pobiera on energię bezpośrednio z ESC, więc problem z szukaniem specjalnego gniazda do podłączenia baterii macie z głowy.

No dobrze, pozostaje jeszcze kwestia połączenia ESC z baterią. Ta ostatnia ma końcówkę, żeńską, na ogół jest to typ XT60. A dokąd podłączyć baterię ? Otóż najłatwiej drugi koniec przewodu z końcówką męską dolutować do płytki dystrybucji zasilania.

Płytka dystrybucji (rozprowadzenia) zasilania (ang. power distribution board)
Jej zadaniem jest ułatwienie podłączenia równoległego 4 ESC, a nierzadko zawiera ona również regulatory napięcia odpowiednio 12V i 5V.

Jak widzicie na zdjęciu, moja akurat była dobrze opisana, ale nawet jeśli nie, to jej działanie jest banalnie proste. Otóż, każde pole lutownicze z (+) będzie połączone z dodatnim biegunem baterii, a te z (-) - z ujemnym. Jeśli nie ma dedykowanego miejsca, gdzie mamy wlutować przewód z wtykiem dla baterii (tutaj - Vin) to przylutowujemy go zgodnie z biegunami: czerwony do (+) i czarny do (-) do dowolnej pary tak oznaczonych punktów. Od tego momentu, po podłączeniu baterii, każde z pól lutowniczych oznaczonych (+) będzie połączone z biegunem dodatnim baterii. W każde z takich wolnych miejsc (tutaj Vout) możemy podłączyć czerwony przewód zasilający od ESC. Analogicznie jest z tymi w kolorze czarnym.

Na zdjęciu widzicie dokładnie rozprowadzenie zasilania. Z lewej strony (Vin) przylutowane są przewody z końcówką do podłączenia baterii. Vout1-4 to miejsce do podłączenia ESC. Miejsca są w narożnikach, ponieważ ESC na ogół jest pomiędzy płytką dystrybucyjną, a silnikiem, zamocowane pod ramą, lub częściej - na samym ramieniu.
Te elementy elektroniczne pośrodku płytki dystrybucyjnej to regulatory napięcia. Jak widzicie ich wyjście jest wyprowadzone tam, gdzie pojawia się oznaczenie 5V. Wewnątrz płytki zostały poprowadzone ścieżki, które prowadzą od (+) baterii do regulatora napięcia i z niego do pola lutowniczego z (+). Mają one również wspólną masę. Tam, gdzie pojawia się oznaczenie Vout mamy napięcie bateryjne (w przypadku 3S - 11.1V), natomiast w jednymi miejscu płytki dystrybucyjnej pojawia się właśnie napięcie 5V pochodzące z regulatora. Możemy do niego podłączyć wszystkie urządzenia, które wymagają takiego właśnie zasilania.

Łączymy Silniki z ESC i kontrolerem lotu
Teraz pora zmierzyć się z całościowym podejściem do połączeń pomiędzy komponentami. Przygotowałem dla Was dwa schematy. Pierwszy pokazuje, jak połączyć ze sobą wszystkie wspomniane elementy zgodnie z rzeczywistymi kolorami przewodów, które będą miały urządzenia.

Silnik połączony jest z ESC trzema przewodami, które łączymy dowolnie - w najgorszym wypadku silnik będzie pracował w drugą stronę. Tego jednak nie sprawdzimy dopóki nie będziemy mieli połączenia. Dalej dwa przewody od ESC - czerwony i czarny - podłączamy do płytki dystrybucji zasilania. Aby napięcie rozprowadzić po wszystkich komponentach, z drugiej strony potrzebujemy podłączyć baterię. Z racji tego, że quadrocopter nie ma własnego włącznika, musimy mieć jakiś sposób, żeby podpiąć i odłączyć zasilanie. Realizujemy to poprzez wtyk i gniazdo. Jedno z nich jest na przewodzie od baterii. Kawałek kabla z drugim musimy dolutować do płytki dystrybucyjnej. Żeby nasz kontroler lotu miał zasilanie i mógł się "dogadać" z ESC, 3-pinowe złącze od tego ostatniego podłączamy do odpowiednich pinów na kontrolerze lotu. Jednym z nich dostarczany jest sygnał sterujący, pozostałe dwa to zasilanie i masa.
Teraz przyjrzyjmy się jak rozkładają się napięcia zasilające w całym quadrocopterze. Do tego użyję drugiego schematu, który kolorami pokazuje, na których przewodach mamy zasilanie bateryjne (np. 11.1V dla 3S), a w których tylko 5V, czyli zasilanie elektroniki pokładowej (np. kontroler lotu). Jak widać na razie większość urządzeń wykorzystuje zasilanie z baterii. Jedyne ESC zamienia jej znamionowe napięcie na 5V i to dostarcza do kontrolera lotu.

ESC OPTO
Należy jednak uważać, ponieważ nie wszystkie ESC dają na wyjściu 5V. Te, które w opisie mają BEC (ang. Battery Eliminator Circuit) lub UBEC (ang. Ultimate Battery Eliminator Circuit) owszem. Są jednak również ESC, które są określone jako OPTO, co pochodzi od optoizolacji. Polega ona na galwanicznej separacji układów elektronicznych i sterujących, od pozostałych elementów, w których płynie duży prąd. A po polsku ? Jeżeli nastąpi zwarcie w ESC, albo silniku, to nie spali się przy okazji kontroler lotu i inne elektroniczne komponenty. Regle OPTO mają jednak także tą cechę, że nie zawierają regulatora napięcia, więc do kontrolera lotu prowadzą tylko dwa przewody - sygnałowy i uziemienie. W takiej sytuacji zasilanie 5V dostarczamy poprzez osobny regulator, który z jednej strony przylutowujemy do płytki dystrybuującej zasilanie (bezpośrednie podłączenie do baterii), a 3-pinowe złącze wpinamy do kontrolera lotu w dowolne niezajęte gniazdo (w quadrocopterze pierwsze 4 są zajęte przez ESC).
Analogiczne schematy do powyższych przedstawiam także dla regulatorów OPTO.

Kluczową zmianą jest nowy komponent nazywający się 5V UBEC. To nic innego jak regulator napięcia 5V, który można kupić albo jako osobny element, albo wykorzystać ten z płytki dystrybucyjnej, jeśli takowy się tam znalazł. Jego jedyną funkcją jest zamiana napięcia baterii (np. 11.1V) na 5V, którego oczekuje elektronika. Jeśli dostarczycie jej bezpośrednio prąd z baterii - po prostu się spali.

No dobrze, a więc podsumowując tą część, zasilanie rozprowadzamy z baterii poprzez płytkę dystrybucyjną bezpośrednio do ESC. Te łączymy z silnikami z użyciem 3 przewodów, które odchodzą od każdego z nich. Możemy je połączyć dowolnie, tyle, że silnik będzie pracował w jedną, lub drugą stronę. Chcąc odwrócić kierunek pracy motoru wystarczy zamienić miejscami dwa dowolne kable. W kolejnych wpisach wyjaśnię dlaczego tak jest. 3-pinowe złącze z ESC wpinamy z kolei do kontrolera lotu, zgodnie z kolejnością w jakiej tego oczekuje. Na ogół rozpoczyna się od lewego-przedniego silnika i idzie zgodnie z ruchem wskazówek zegara. Wspomniany przewód dostarcza regulowane zasilanie 5V z ESC do kontrolera lotu (czerwony i czarny przewód) oraz przenosi sygnał od niego do ESC (biały przewód).
Odbiornik RC, a kontroler lotu
Quadrocopter nie byłby w stanie polecieć, gdyby nie sygnał sterujący z aparatury. Aby go obsłużyć, należy do quadrocoptera podłączyć odbiornik RC. W przypadku tego ostatniego potrzebuje on zasilania (również 5V), a w zamian musi dostarczyć sygnał sterujący, który odbierze, do kontrolera lotu. Zależnie od sposobu komunikacji między obydwoma urządzeniami, będziemy mieli wszystko na jednym bądź wielu przewodach. Co istotne, zasilanie do odbiornika dostarczane jest ponownie 3-pinowym złączem, które również podpinamy do kontrolera lotu tylko do innego zestawu złącz niż silniki. Jak pamiętacie, ten ostatni dostaje zasilanie z ESC, więc może się nim podzielić z odbiornikiem. W zamian, używając trzeciego przewodu (pozostałe to + i -) przenosi on sygnał, który otrzymuje z aparatury.

Na zdjęciu powyżej macie kontroler lotu Naze32 z podłączonym odbiornikiem FrSky. Ten pierwszy leży oczywiście po lewej stronie. Możecie na nim zauważyć 3 rzędy otworów oznaczonych od 1 do 8, w które wlutujemy później goldpiny. Tam zostaną podłączone kolejne ESC. Pierwszy silnik (na ogół lewy-przedni) do 1 i potem zgodnie z ruchem wskazówek zegara. Jeśli mamy ESC OPTO to podłączymy je normalnie do pinów 1-4, a zasilanie z UBEC wyląduje na przykład na 5, choć nie ma to wielkiego znaczenia.
W przypadku tego kontrolera mamy dedykowane złącze prowadzące sygnał z odbiornika, do którego wpinamy dołączony w zestawie komplet przewodów zakończony z drugiej strony 3-pinowymi wtykami serwo. Bystre oko zauważy także, że odbiornik ma numerację 1-8, co odpowiada kolejnym kanałom sterowania. Jak wspomniałem wcześniej, zasilanie jest doprowadzone z kontrolera lotu, co widać po wtyczce wpiętej w pierwszy kanał. Idą tam 3 przewody - czerwony i czarny, czyli 5V i masa oraz biały - sygnał PWM z pierwszego kanału. Dla pozostałych, mimo iż wtyczka ma 3 piny, tak naprawdę idzie tam tylko jeden przewód, ponieważ dublowanie zasilania nie ma sensu - wystarczy podać je do odbiornika jednym zestawem kabli. Zwróćcie też uwagę na to w jaka jest kolejność przewodów na wtyczce od kontrolera i tych, które wchodzą do odbiornika. Idąc od prawej - dwa pierwsze to zasilanie (czerwony, czarny) i 1-wszy kanał (biały). Następnie jest niebieski, żółty, zielony, czerwony i czarny. Dwa ostatnie kolory są powtórzone, ale wypełniają tylko jeden pin wtyku, który ma miejsce na 3. Stąd wiemy, że to przewód sygnałowy. Do odbiornika wchodzą one w kolejności, którą wymieniłem i jest zgodna z tym, jak ułożone są w wielopinowym wtyku. Takie podłączenie uprości Wam sprawę podczas konfigurowania aparatury.
Analogicznie tak naprawdę połączone są ESC z kontrolerem lotu, szczególnie kiedy te pierwsze występują w wariancie OPTO. Spójrzmy na CC3D w wersji mini już z goldpinami i wpiętymi w nie przewodami od regli.

Na powyższym zdjęciu kontroler jest obrócony i pierwszy ESC jest podłączony tak naprawdę z prawej strony. Być może nie jest to od razu klarowne, ale pierwsze cztery wtyczki mają dwa skrajne przewody, bez środkowego. Ten ostatni to właśnie 5V, ale jak już wspominałem, w przypadku ESC OPTO zasilanie podaje się osobno, dlatego do kontrolera wchodzi wyłącznie przewód sygnałowy oraz masa. Z kolei wtyk skrajnie po lewej podaje napięcie, ale bez sterowania. Dlaczego ? Ponieważ na jego końcu znajduje się wcześniej wspomniany regulator napięcia, czyli UBEC. Przedstawiam go na zdjęciu poniżej.

Oczywiście przewód bez wtyczki to ten, który musimy przylutować do płytki dystrybucyjnej.
Warto jeszcze wiedzieć, którą stroną podłączać przewody do odbiornika, bo nie jest to obojętne. Spójrzmy na poniższe zdjęcie.

Na krawędzi obudowy widać 3 kółka, odpowiednio (-), (+) i kształt sygnału cyfrowego. Jak łatwo się domyślić, czarny przewód musi wchodzić z tej strony, gdzie jest masa, czyli oznaczenie (-), natomiast przewody kolorowe (sygnałowe) od strony rzeczonego kształtu, przypominającego pik napięcia w sygnale cyfrowym. Poniżej prezentuję jeszcze jeden odbiornik z pinami wyprowadzonymi pionowo i tak samo oznaczonymi.

Na koniec już ostatnie zdjęcie pokazujące cały przebieg połączeń, o którym w tym artykule rozmawialiśmy.

A więc, silnik połączony jest z ESC 3 przewodami (zielone folie termokurczliwe). Z drugiej strony regulator jest przylutowany do płytki dystrybucyjnej, do której również biegnie przewód zakończony wtykiem XT60 - tam podłączamy baterię (górna część zdjęcia). Kontroler lotu (zółta obudowa - CC3D) "rozmawia" z ESC poprzez biało-czarny przewód. Z boku wychodzi wielopinowe gniazdo, do którego podłącza się pęczek przewodów i wtyczek 3-pinowych prowadzących do odbiornika. Oczywiście ilustracja pokazuje tylko jedno podłączone ESC, natomiast finalnie będą 4. Podobnie jest z odbiornikiem, który ze względu na większą czytelność zdjęcia ma podłączony tylko jeden kanał. Czy czegoś na tym zdjęciu brakuje ?
Jeżeli ze zrozumieniem przeczytaliście cały wpis to zauważycie, że ESC jest OPTO, więc nie daje zasilania kontrolerowi lotu. Na zdjęciu zabrakło więc UBECa, który powinien być przylutowany z jednej strony do płytki dystrybucyjnej, a z drugiej wpięty tam, gdzie pozostałe ESC - byle pod silnikiem, którego fizycznie nie ma, czyli 5, 6 itd.
I co, wszystko jasne ? Super, to zabieramy się za niezbędne obliczenia, które określą nam zgrubnie, jakich komponentów potrzebujemy, a następnie je sobie dobierzemy. A to już w kolejnej części ! Do następnego !
{kind=link}