
Źródło: https://top-10-drones.com/blog/racing-drones-buyer-guide/
Weszliśmy w kolejny już rok, a technologia i rozwój związane z kopterami ani myślą zwolnić. Zapewne niektórzy, korzystając z sezonu zimowego, planują złożenie własnego modelu i uprzedzając ten fakt, w tym poradniku chciałbym przede wszystkim powiedzieć, czego już na pewno NIE kupować. Oczywiście i tak postawisz na swoim, ale muszę to napisać, żeby potem z satysfakcją zapytać: "A nie mówiłem?". A więc do dzieła! Przekopmy się przez historię procesorów, protokołów i kopterowych ram z zeszłej epoki!
Otwieramy muzeum
Początek poradnika musiał się rozpocząć informacjami dla wszystkich, którzy fascynują się archeologią. Na rynku (o zgrozo!) wciąż dostępne są elementy, na których budowałem swój pierwszy kopter mimo iż od tego momentu minęły już na pewno ze 3 lata. W kategoriach smartfonów przemnóżcie ten wynik przez 4 (telefony sprzed 12 lat), zaś motoryzacyjnie od razu przez 8 (24-letnie auto to dobra analogia). Aby odkryć antyczy świat kopterów należy w pierwszej kolejności zapomnieć o Betaflight, Kissie, OSD, DShotcie i skryptach LUA i wszystkich tych hasłach, które czytając ten blog mogły już obić się Wam o uszy. No to teraz słuchajcie!
ZMR250
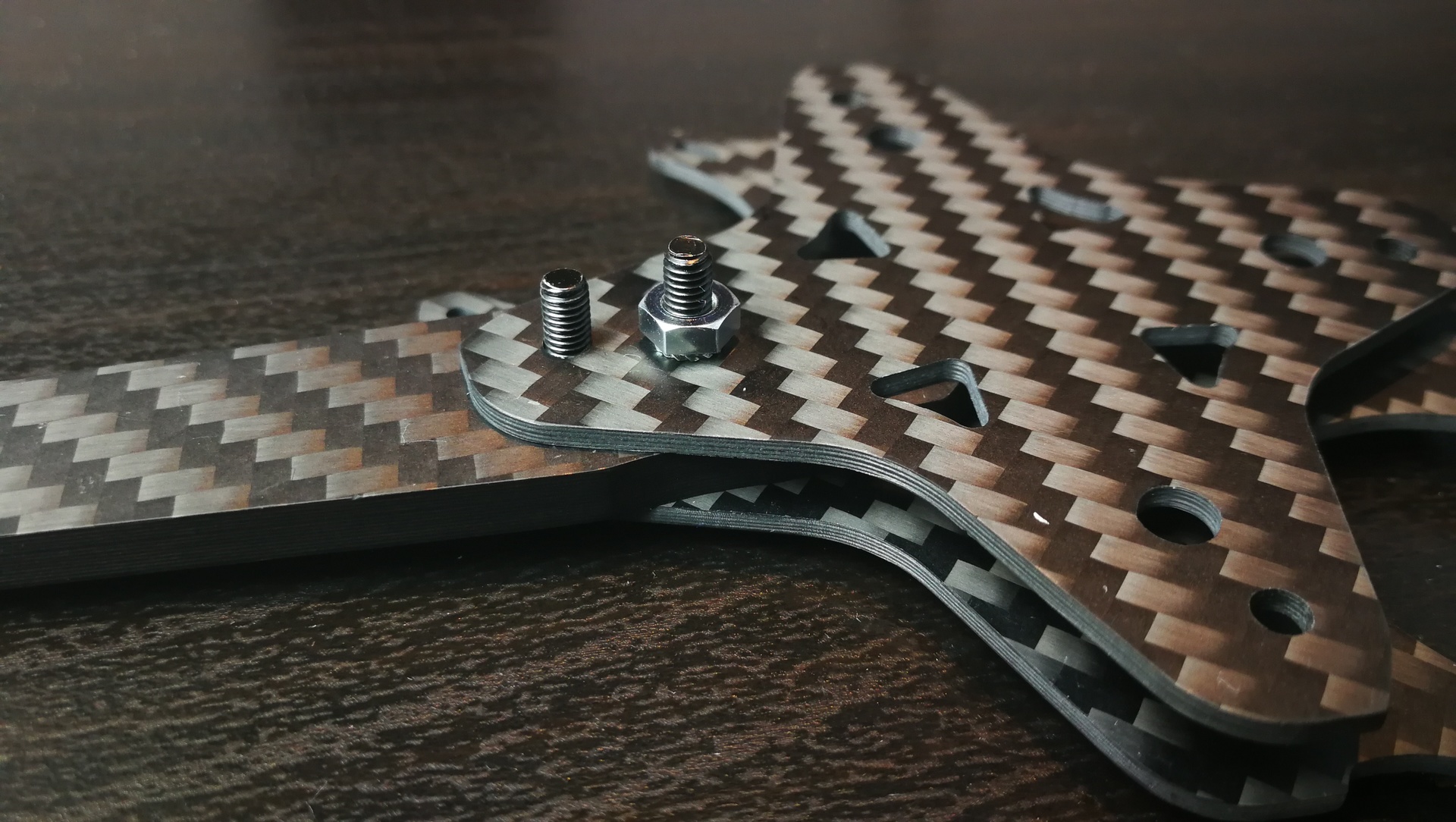
Żadne muzeum nie byłoby kompletne bez klasycznego przedstawiciela gatunku, czyli ramy ZMR250. Wciąż obecna w wybranych Polskich sklepach i w gotowych zestawach na AliExpress, rama ta jest prawdziwym rarytasem dla łowców antyków.

Rama ta w zestawieniu z dzisiejszymi rozwiązaniami miała tylko parę elementów wspólnych. Po pierwsze wykonana była z włókna węglowego (choć nienajlepszej jakości), miała 4 ramiona i podział na bottom-plate i top-plate połączone ze sobą słupkami. Koniec.
W pierwszej kolejności zwróćmy uwagę na to, że dolna część koptera to dwie długie płyty z włókna węglowego pomiędzy które wciśnięte zostały ramiona. Każde z nich trzymane jest przez 4 śruby. Kontroler lotu mocuje się w zupełnie osobnych otworach. Dzisiejsze ramy składają się z jednej dolnej płyty (ang. bottom-plate), ramiona schodzą się na ogół w środku, a całość jest tak pomyślana, że śruby stabilizujące każde ramię są podstawą dla kontrolera lotu, albo ESC 4w1 (rozstaw 30.5 x 30.5mm), zaś reszta śrubek jest przy okazji podstawą dla słupków, na których potem zamocujemy górną część ramy. Pozostałością po drugim bottom plate jest na ogół tylko niewielka przekładka, która usztywnia konstrukcję, ale jednocześnie nie duplikuje głównego elementu ramy.
Rozplanowanie otworów w ZMR250 nie miało większego sensu, a plątaninę przewodów wciskało się pomiędzy dwa dolne płaty, jeśli tylko udało się to sensownie wykonać. Nie brakowało także owijania nadmiarowej długości przewodów wokół słupków, czy zawijania kabli od silników wokół ramion. Musimy pamiętać, że w tamtych czasach na porządku dziennym była płytka dystrybucji zasilania, której jedyną funkcją było skrzyżowanie ze sobą przewodów zasilających od baterii wraz z zasilaniem do ESC. Dziś albo jest to część ESC 4w1, albo wręcz pady lutownicze znajdują się na samym kontrolerze lotu.
Źródło: https://www.getfpv.com/qav250-fury-power-distribution-board.html
Pamiętajmy, że stosowano wtedy kamery płytkowe i nie było mowy o jej pochylaniu, chyba że chałupniczym. Stąd w ramie ZMR250 znajdziemy mocowanie do kamery, które ma otwory ułożone tak, aby śruby weszły w osi kamery, a nie prostopadle do niej. O nie - współczesnego Runcama, Foxeera, czy Caddxa nie zamocujemy, bo nie ma ani płytek do trzymania kamery z boku, nie mówiąc już o otworach montażowych.

Źródło: https://www.instructables.com/id/QAV250-Racing-FPV-Quadcopter/
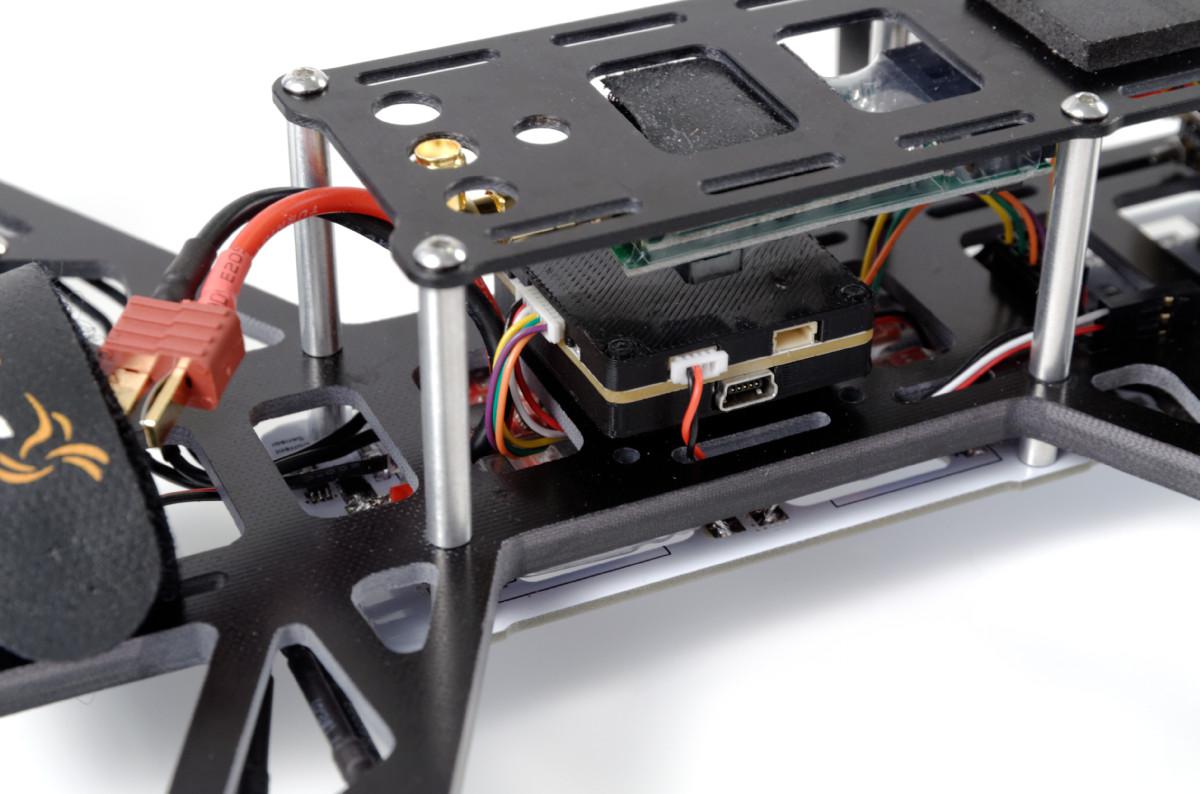
Na pewno zwróciliście też uwagę na zupełnie unikalne mocowanie u góry, w przedniej części koptera. Ta płytka osadzona na 4 gumach to podstawka antywibracyjna pod kamerę do rejestrowania lotu. Chodziło głównie o urządzenia takie jak Mobius HD, który był w miarę płaski i podłużny - gabaryty zupełnie niepodobne do GoPro, które wtedy było jeszcze raczej za ciężkie i zupełnie nie dało się go sensownie zamocować. Oczywiście ponownie mocowanie jest płaskie, bo nikt wtedy nie myślał o tym, że kopter pochyla się podczas lotu, więc przy szybszym locie (nie żeby była to zawrotna prędkość) filmowaliśmy głównie ziemię nad którą lecieliśmy, chyba że przy szerokim kącie załapał się nam kawałek horyzontu, co było nie lada wyczynem.
Kamera płytkowa
Jeśli jest jakiś produkt, który pozostaje wyznacznikiem początków FPV w kopterach, to z pewnością będzie nim kamera płytkowa. To rozwiązanie prawdopodobnie utrzymałoby się do dziś, gdyby nie fakt, że w ramę koptera w żaden rozsądny sposób tej kamery nie dało się zamocować. Nazwa wzięła się od tego, że sama soczewka i matryca były przyczepione do kwadratowej płytki drukowanej, ktora zawierała gniazda i resztę elektroniki. W nowszych kamerach udało się to wszystko schować w małych obudowach, ale wtedy koptery jeszcze raczkowały.

Co ciekawe w tamtym czasie największa nagonka była na sprzęt z sensorem CMOS, który miał dość małą dynamikę obrazu i dość długo zajmowała zmiana ekspozycji, co powodowało, że przy szybkich zmianach oświetlenia (lot pod słońce i w cieniu) kamera albo pokazywała nam prześwietlony obraz (wszystko zbyt jasne), albo wręcz odwrotnie i ziemia pod nami była czarna, co powodowało, że nie wiedzieliśmy dokąd dokładnie lecimy. Dużo lepiej radziły sobie sensory CCD, więc piloci z chęcią przesiadali się na takie właśnie sprzęty. W ciągu ostatnich lat dokonano wielu poprawek w matrycach CMOS i teraz z powrotem wróciły do łask sprawując się doskonale w zmiennych warunkach oświetleniowych i dając naprawdę rewelacyjną jakość obrazu.

Wspomnę też o bardzo istotnej rzeczy - kącie widzenia. Kamery, które znajdziecie w tanich modelach typu Eachine Wizard X220, Tyro 99 itd. to nie tylko marne przetworniki, ale też wąskie soczewki. Aby swobodnie poruszać się w przestrzeni, potrzebny jest w miarę szeroki kąt, aby widzieć nie tylko to, co jest przed nami, ale również pod i obok. Nie jestem w stanie wyrazić, jak wielką trudność sprawia mi latanie sprzętem, który ma wąski kąt widzenia. O ile nie znamy bardzo dobrze okolicy, każdy zwrot będzie dla nas zaskoczeniem, bo nie będziemy np. widzieli krzaka, który czaił się na nas zaraz po zwrocie. Wchodząc łukiem w zakręt możemy nie zauważyć słupa, ławki itd., bo będą poza naszym polem widzenia. Pamiętajmy, że po założeniu gogli, jedynymi "oczami" będzie kamera, i jeśli ona nie pokaże nam jakiejś przeszkody, z pewnością się o niej nie dowiemy.
Jeżeli zaczynacie więc latanie FPV, postawcie na naprawdę szeroki kąt. Soczewka o ogniskowej 2.3mm, czy 2.1mm co prawda może nieznacznie zniekształcić Wam obraz na krawędziach, ale dzięki niej zobaczycie dużo więcej, a im ciaśniejsza przestrzeń, tym bardziej istotne się to staje. W zestawach na ogół znajdziecie 2.8mm, czyli około 90 stopni kąta widzenia. Moim, skromnym zdaniem jest to o wiele za mało, żeby mieć przyjemność z latania.

Kamera jest jedynym sposobem na obserwowanie rzeczywistości, który posiadamy i robienie na niej oszczędności skutecznie utrudni nam cieszenie się FPV. Nawet jeśli kupimy, albo złożymy tani kopter, dołożenie około 80-100 zł i zakup kamery od Runcam, Caddx, czy Foxeera skutecznie poprawi nasze odczucia odnośnie latania - to jeden z najważniejszych zakupów pod względem części! Niezależnie od gogli, których używamy.
Naze32, CC3D, Multiwii i CleanFlight
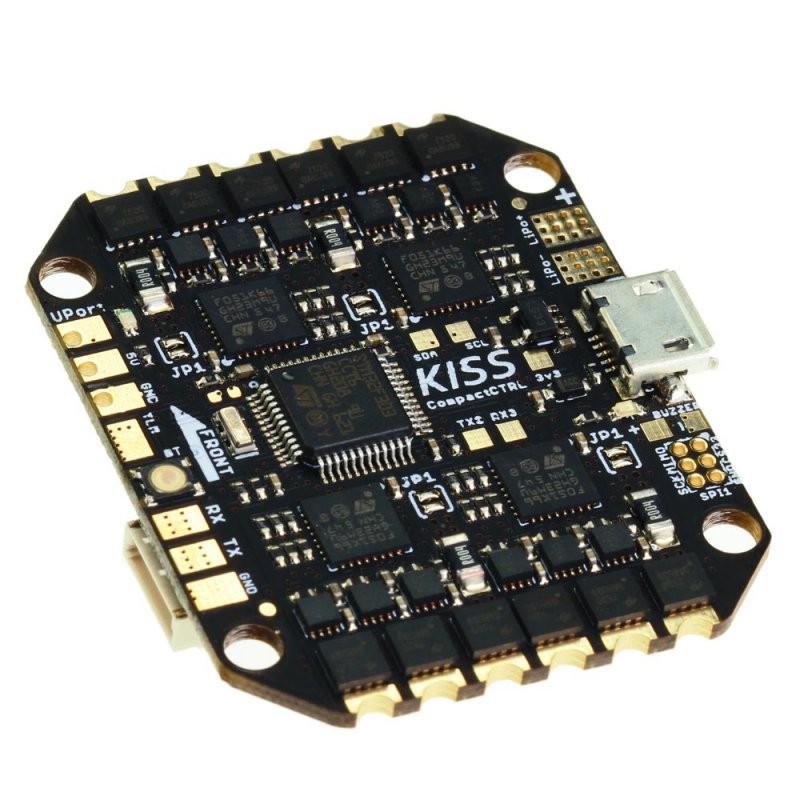
Kontrolery lotu pojawiają się w takim tempie, że trudno za nimi nadążyć. Wraz z miniaturyzacją niektórych elementów i "upychaniem" ich w układach scalonych, np. OSD (ang. On-Screen Display - nanoszenie dodatkowych informacji - np. napięcia baterii na obraz z kamery, który widzimy w goglach), większość współczesnych rozwiązań mocno się różni od swoich poprzedników. Chodzi na przykład o upowszechnienie gniazd do podłączenia regulatorów 4w1, co potrafi nam oszczędzić plątaniny przewodów.
Źródło: https://www.getfpv.com/kiss-compactctrl-cc-all-in-one.html
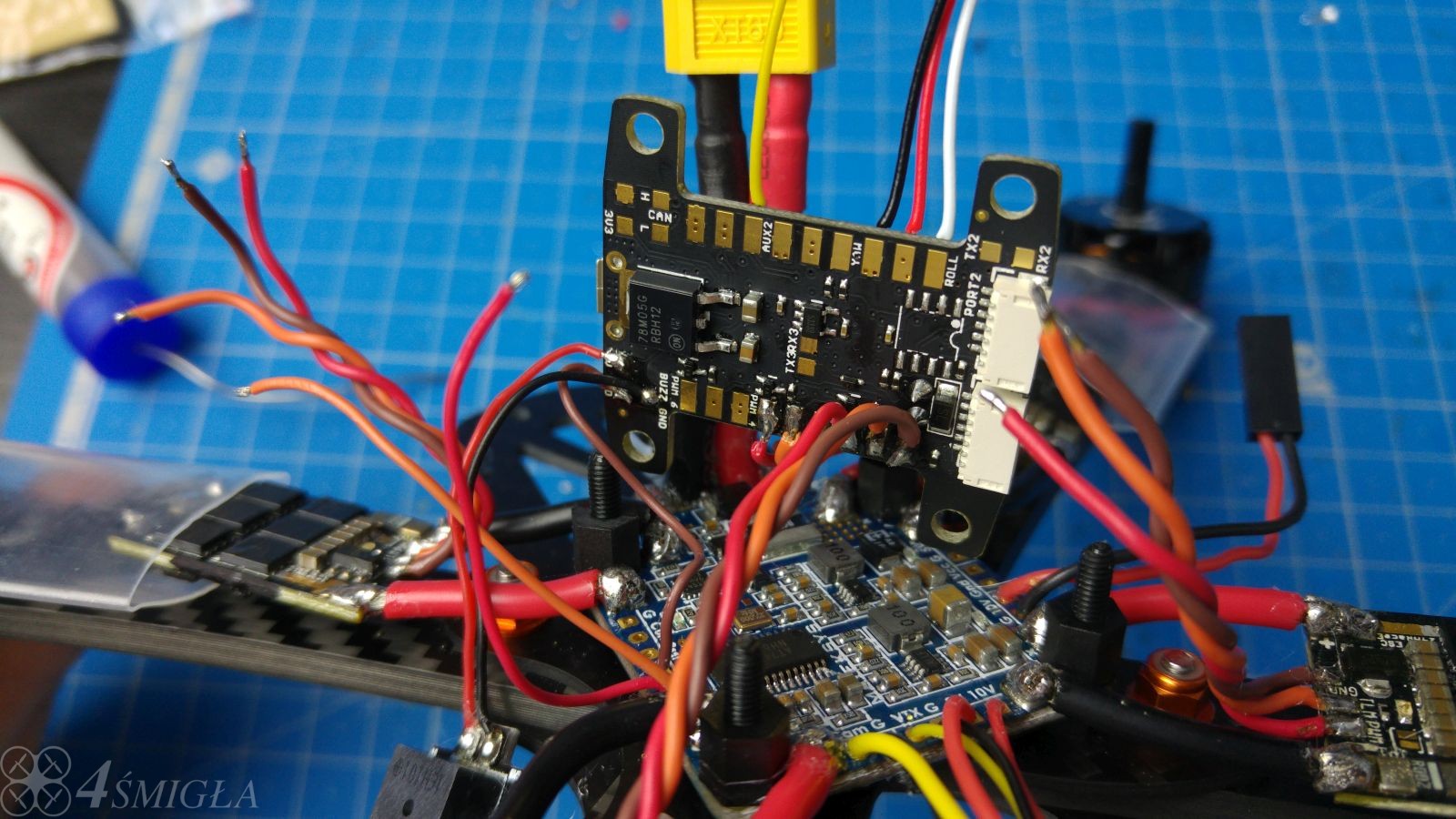
Współczesne kontrolery lotu mają też bardzo rozsądnie rozmieszczone piny i punkty lutownicze, bazując na fizycznym rozkładzie elementów w kopterze. Przykładowo zasilanie do ESC będzie się znajdowało na rogach płytki, zaś przewody od kamery przylutujemy z przodu, bo w ten sposób nie będą one przechodziły przez całą długość płytki. Z dużym prawdopodobieństwem nowoczesny kontroler lotu nie będzie miał pól lutowniczych pod spodem, co potrafi skomplikować montaż. Oczywiście pierwsza generacja Kiss FC, wciąż dobry kontroler, jest dwustronna, ale to dość wyjątkowa sytuacja.
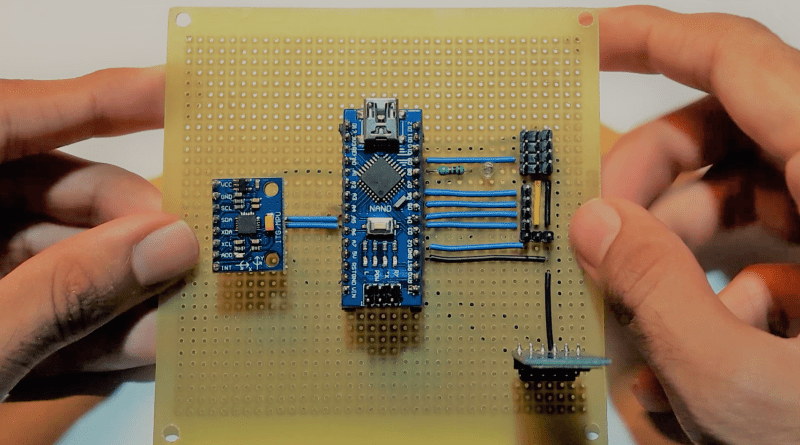
No dobrze, a jak to "drzewiej" bywało? Ogromną popularnością cieszyło się MultiWii. Płytka bazowała na procesorze Atmela i była ewolucją w stosunku do pierwszych prób budowania kopterów w oparciu o płytki Arduino oraz połączone z nimi: akcelerometr z żyroskopem (MPU6050) oraz dowolny odbiornik.
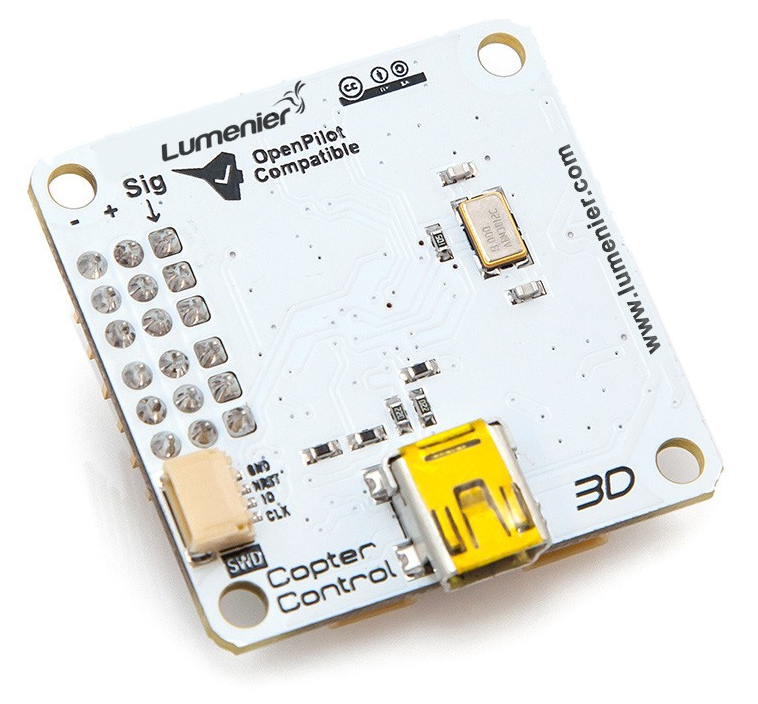
Alternatywą dla płytek bazujących na Arduino było CC3D - również kontroler lotu, który działał w oparciu o oprogramowanie OpenPilot, który bodajże dziś jest jeszcze wspierany przez LibrePilot. Było to jeszcze przed pojawieniem się CleanFlight i Betaflight, które po raz kolejny odmieniły sposób konfigurowania kopterów.
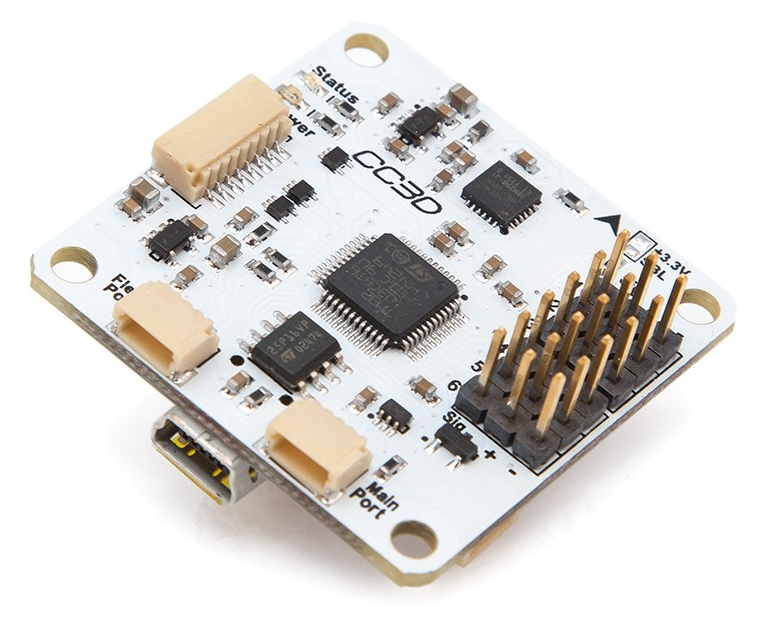
Niewątpliwym plusem CC3D była względna łatwość konfigurowania koptera. O ile Multiwii mogło nieco przytłaczać toną opcji na ekranie, CC3D starało się jak najwięcej ukryć, udostępniając między innymi kreator, który pomagał we wstępnym ustawieniu odbiornika, kierunków działania silników, kalibracji ESC i tak dalej. W porównaniu z surowym MultiWii było to zachęcające oprogramowanie, ale jasnym było, że profesjonaliści wybierają płytki z MultiWii, podczas gdy żółtodzioby takie, jak ja, trzymają się kontrolera CC3D.
Płytka przeżyła dość długo, bo nawet wczesne wersje Betaflight dały się wgrać do tego kontrolera, choć wymagało to sporo ekwilibrystyki i nie wszystkie funkcje działały. Tym niemniej i tak o niebo łatwiej było poustawiać kontroler, niż w OpenPilot/LibrePilot, który był sensowny jak wyszedł, ale potem przyćmiły go nowsze konfiguratory. Obecnie wciąż dostępny jest software LibrePilot, który "gada" z kontrolerami lotu CC3D, ale współcześnie już nikt się za nimi nie ogląda.

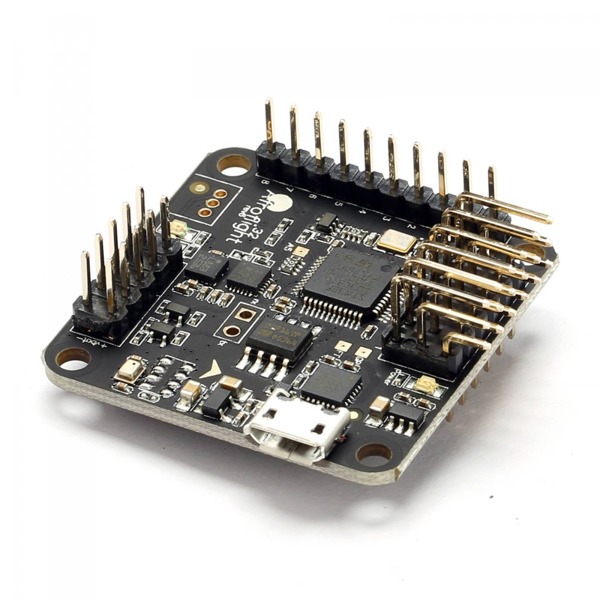
Kolejną generacją, która odświeżyła nieco podejście do latania kopterami, stał się kontroler lotu Naze32. Sukces płytki był na tyle duży, że na rynku pojawił się spory wybór klonów wszelkiej maści i rodzaju. Jednym z późniejszych spadkobierców był np. SP Racing F3. Ważne jest to, że wraz z hasłem "Naze32" zaczęło być kojarzone nowsze oprogramowanie - np. CleanFlight, który był 32-bitową wersją oryginalnego MultiWii. Ewolucja doprowadziła do powstania nowego konfiguratora, który jednak wciąż przypominał swojego protoplastę.

Źródło: http://wiki.sunfounder.cc/index.php?title=MultiWii_GUI_Parameter_Configuration
Późniejsze projekty typu BetaFlight, czy ButterFlight to tzw. forki, czyli odgałęzienia oryginalnego kodu źródłowego danego projektu. I tak ButterFlight jest forkiem BetaFlight, BetaFlight powstał z CleanFlight, zaś CleanFlight to fork BaseFlight. Aha, no i BaseFlight powstał na MultiWii właśnie. Konfiguratory i firmware wszystkich projektów z końcówką "Flight" są więc oparte właśnie o MultiWii, którego wkład w rozwój dzisiejszego latania nie powinien być zapomniany. Oczywiście od tego czasu opracowanych zostało sporo algorytmów i filtrów, które powodują, że kopter zachowuje się w powietrzu o niebo lepiej, niż jeszcze rok, czy dwa temu, ale ktoś tą bazę stworzył.
Żródło: https://abc-rc.pl/product-pol-7161-Kontroler-lotu-Naze32-REV6-10DOF-32bit-procesor-barometr-i-kompas.html
Nie będziemy już zagłębiać się w sploty pomiędzy wersjami oprogramowania, bo BetaFlight, który wyodrębnił się z CleanFlight, w pewnym momencie zdominował rynek na tyle, że ten ostatni w pewnym momencie po prostu przyjął te same źródła (https://github.com/cleanflight/cleanflight/releases/tag/CLFL_v2.0.0-RC1) i zaczął na nowo odgałęziać się tym razem niejako w drugą stronę. Z kolei ButterFlight był odpowiedzią na rezygnację z filtrów Kalmana w Betaflight, więc zaczęto własną gałąź. Obecnie, różnice mogą się zaznaczać w samym firmware, ale konfiguratory są w zasadzie identyczne i rozróżnimy je wyłącznie po kolorystyce, ponieważ CleanFlight będzie miał dominujący kolor zielony, BetaFlight żółtawy, zaś ButterFlight wyraźnie wpada w pomarańczowy. Nic nie stoi też na przeszkodzie, żeby kopter z wgranym Betaflight ustawiać spod ButterFlight Configurator - połączyć i zobaczyć opcje na pewno nam się uda, natomiast należy pamiętać, że nazwy opcji w samym kontrolerze lotu mogą już się różnić i może się okazać, że coś nie zadziała, albo ustawimy jakąś kosmiczną wartość. Szczególnie należy uważać w zakresie konfiguracji PID i filtrów, ale wiele elementów jest też wspólnych.
Źródło: http://butterflight.co/
Podsumowując, jeśli kupicie płytkę bazującą na MultiWii, kontroler lotu CC3D, albo jedną z wcześniejszych płytek Naze32, sami prosicie się o kłopoty z konfiguracją i będziecie pracować na nieaktualnym zupełnie oprogramowaniu. Owszem, kopter pewnie wzniesie się Wam w powietrze, ale nie liczcie na to, że ktoś na grupach Facebookowych, czy forach będzie w stanie za bardzo pomóc, bo prawie nikt już nie używa tak starych kontrolerów lotu i kompatybilnych z nimi konfiguratorów. Jest oczywiście trochę dinozaurów, które coś pamiętają z CC3D, czy Multiwii, mnie nie wyłączając, ale wolimy spuścić na to zasłonę milczenia i pójść dalej.
ESC SimonK
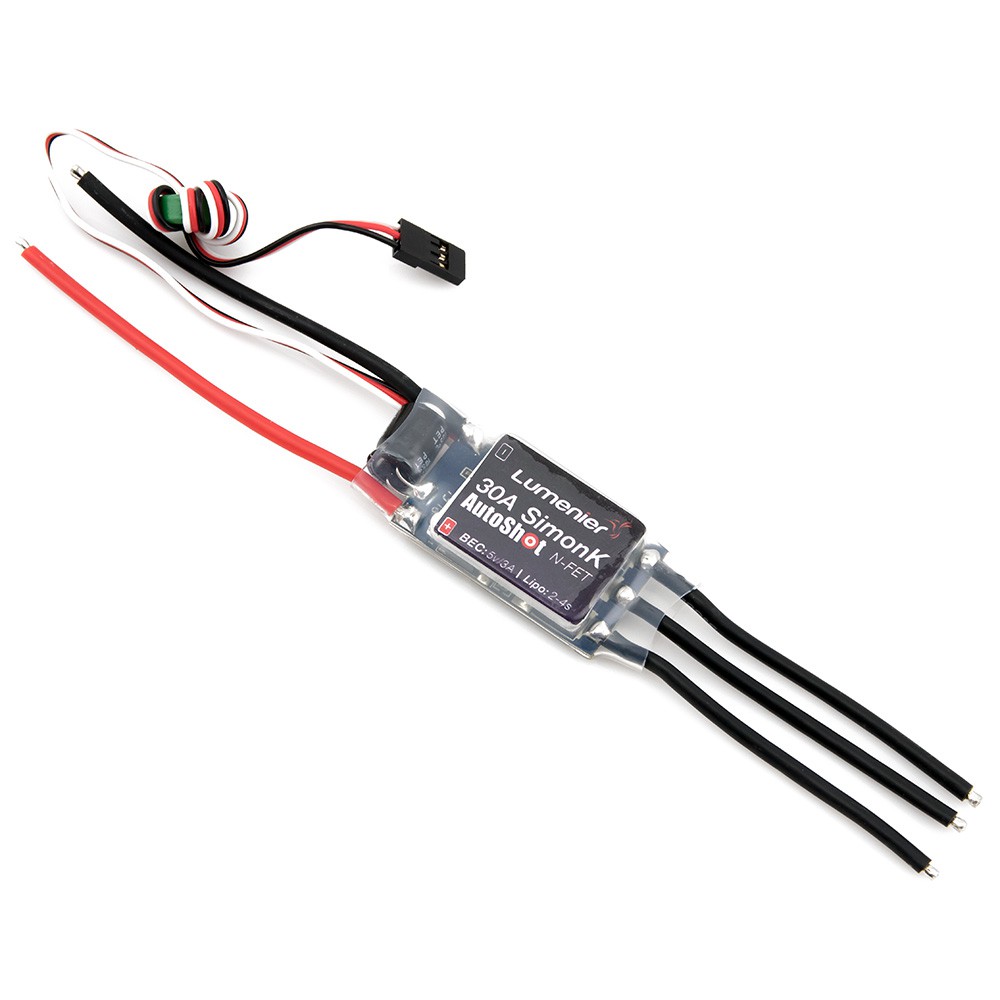
Kiedy zaczynałem przygodę z kopterami, wszyscy chwalili świeży wtedy firmware SimonK, który wprowadzał wiele usprawnień w zakresie obsługi silników bezszczotkowych właśnie dla wielowirnikowców. Na Banggood i w innych sklepach specjalnie podkreślano, że dane ESC mają już wgrane SimonK - nic nie trzeba flashować, bo już jest załadowane, a regulator wspiera ten firmware. W tamtym czasie, zależnie od typu urządzenia, oprogramowanie dało się już aktualizować poprzez 3-pinowy przewód, który odłączało się od kontrolera lotu i przypinało do programatora. To była i tak prosta ścieżka, ponieważ wcześniejsze modele ESC (zresztą pierwsze Kissy też) wymagały zerwania termokurczki i dolutowania przewodów do pinów pozwalających programować dany regulator. Po skończonej operacji odlutowywało się przewody i całość wkładało z powrotem w rurkę termokurczliwą. Bagatela - godzina, czy dwie i gotowe!
Sprawa zaczęła się zmieniać powoli, gdy weszło BlHeli, które podjęło konkurencję z SimonK. Nowsze regulatory aktualizowało się właśnie przez przewód sygnałowy, więc procedura podmiany oprogramowania stawała się nieco prostsza i nie wymagała lutownicy. Wszystko upraszczało BlHeli Suite - aplikacja, która pozwalała wgrywać oprogramowanie do ESC prościej niż dotychczas. W końcu BlHeli wyparło skutecznie SimonK i stało się dominującym firmware na ESC przeznaczonych do kopterów, a potem już nie tylko dla nich.
Kolejne miesiące i lata przyniosły BlHeli_S i w końcu najnowsze BlHeli_32, które podobnie jak Kiss daje sporo zabezpieczeń i dodatkowych funkcji telemetrycznych. Dziś ESC są już naprawdę zaawansowane, mają zabezpieczenia przeciw nadmiernemu przepływowi prądu, ograniczenia termiczne, a dane te potrafią już dostarczać kontrolerowi lotu. Obecnie na OSD możemy ustawić podgląd temperatury regulatorów, a także płynącego chwilowo przez nie prądu.

Źródło: Banggood
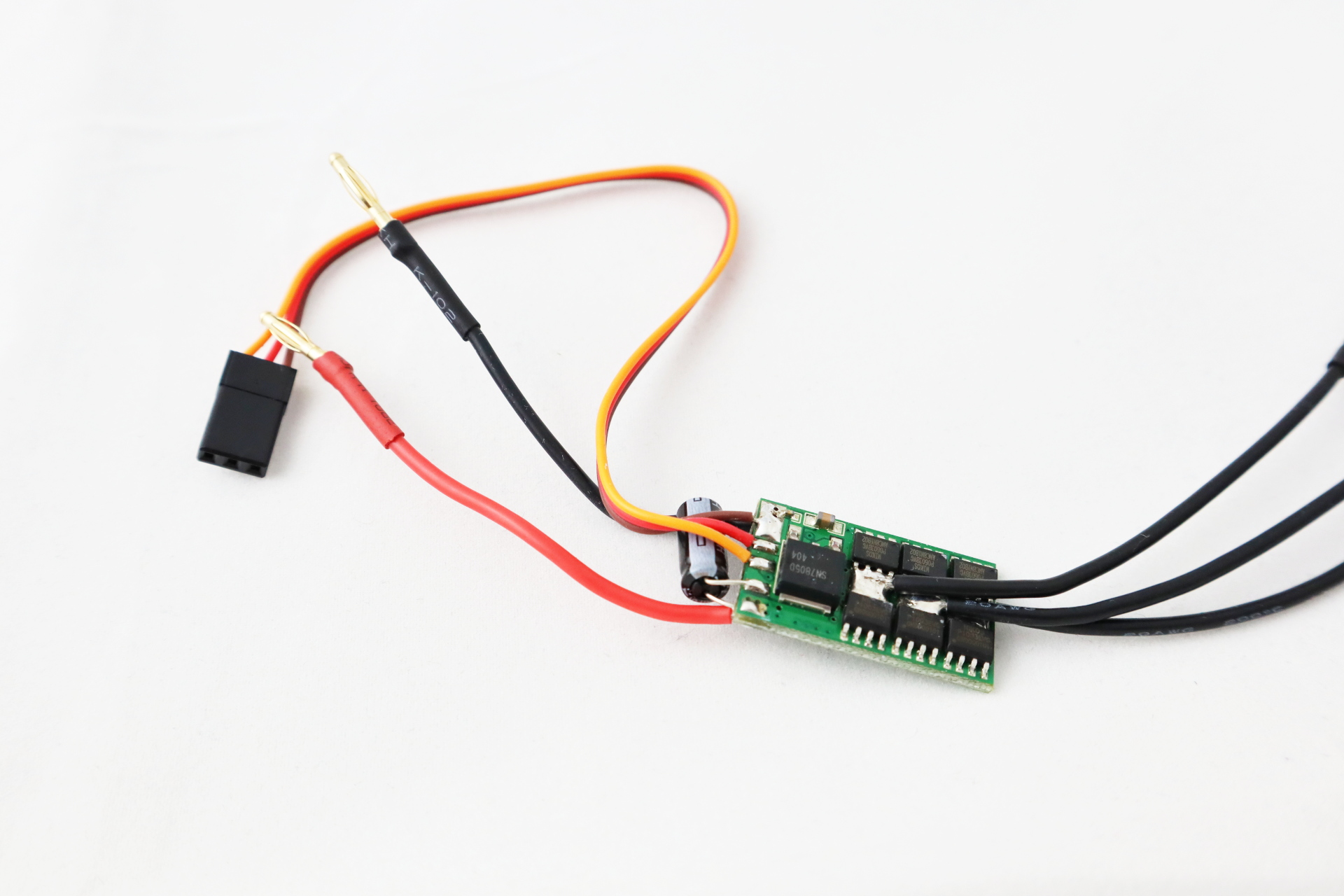
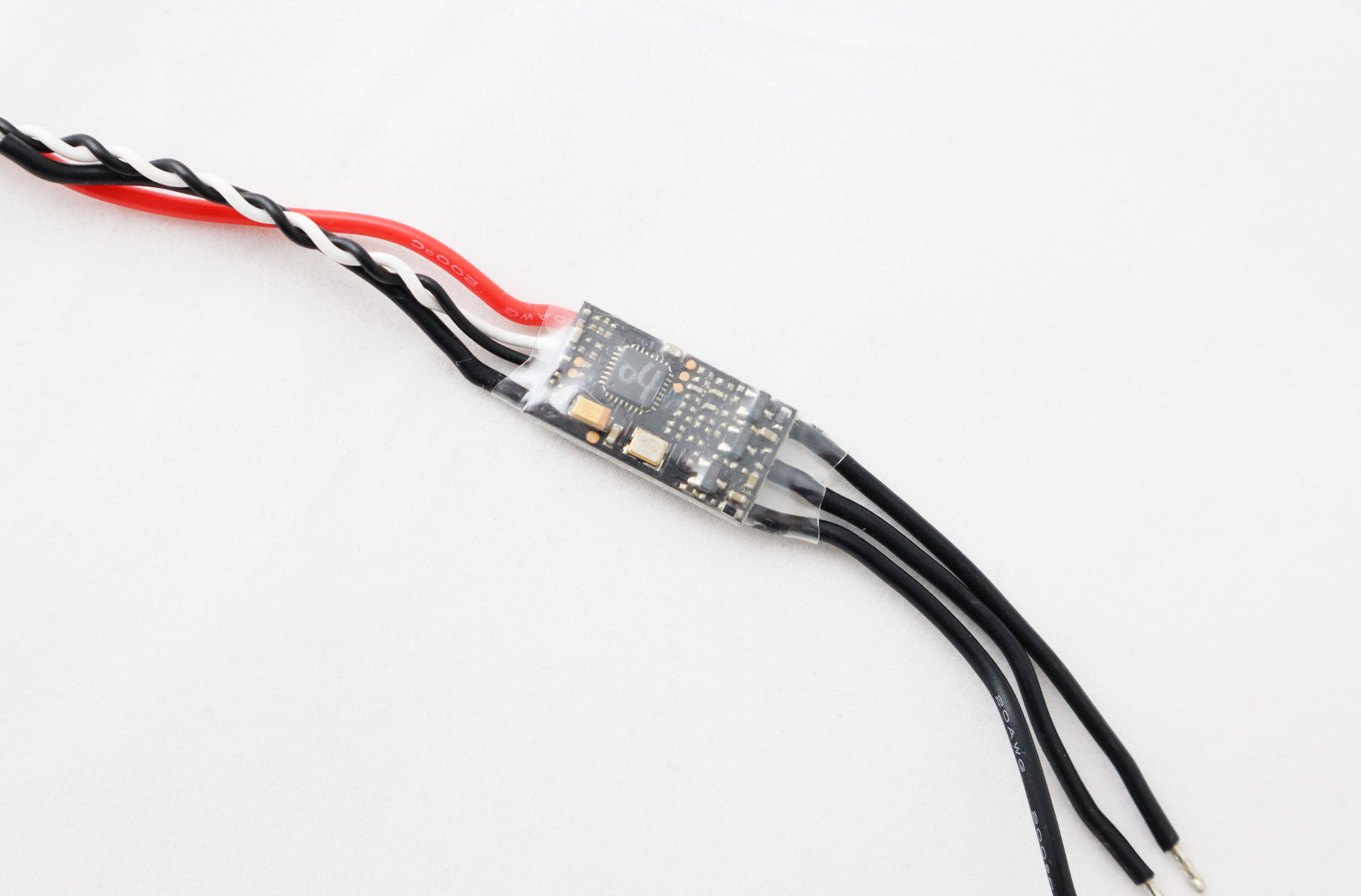
Kiedyś ESC przegrzewało się i paliło. Podobnie kończyło się przeciążenie go śmigłem o zbyt dużym skoku, albo silnikiem o większym, niż zakładane, poborze prądu. Dodatkowo regulatory były relatywnie duże i ciężkie, a większość z nich obowiązkowo miała całkiem spory kondensator elektrolityczny, który filtrował zakłócenia i piki napięcia, ale też znacząco zwiększał gabaryty.
Dzisiejsze ESC dość znacznie się skurczyły, a ich niezawodność skoczyła na tyle, że nierzadko inwestuje się od razu w rozwiązania 4w1, które w dodatku zamiast podawać do 12, czy 20A na silnik, radzą sobie już z 45A, czy nawet 60A. I to wszystko w przystępnej dość cenie. Oczywiście, wciąż są bardziej kosztowne w eksploatacji, niż pojedyncze (z uwagi na to, że wymienia się na ogół całą płytkę), ale i tak nie budzą już takich obaw, jak pierwsze modele.
Wracając do tematu tworzenia muzeum - bardzo zachęcam do zakupu ESC 12A SimonK, ponieważ jeśli jeszcze gdzieś są dostępne, to będzie to idealny eksponat na naszą ekspozycję. AliExpress z pewnością też umożliwi zakup modeli z oryginalnym BlHeli (bez "_s" i "_32"), które będzie stanowiło podobnie łakomy kąsek dla miłośników antyków. Nie należy tego robić.
Protokoły w ESC
Wymyślony przez Kiss DShot stał się protokołem, który zdefiniował na nowo sterowanie ESC. Kontroler lotu po raz pierwszy zaczął dostarczać do regulatora sygnał cyfrowy, który był jednoznaczny i mniej podatny na zakłócenia. Otworzyło to też drogę DShot Commands, czyli komendom, które pozwalały wykonywać ESC inne funkcje. Wartości spoza zakresu 1024-2048, które służą do sterowania obrotami silnika dziś pełnią takie funkcje jak "beacon", czyli udawanie dźwięku buzzera (głośniczka), gdy kopter spadnie w trawę. Jest to robione poprzez wprowadzanie wirników silnika w rezonans o takiej częstotliwości, aby była dla nas słyszalna. Nie sposób też wspomnieć o Turtle Mode, zwanym w Betaflight "Crash Flip", który pozwala ESC gwałtownie rozpędzić wybrane silniki w przeciwną, niż zwykle stronę, aby odwrócić kopter, gdy ten leży do góry nogami. Powoduje to, że często nie musimy już biegać po nasz sprzęt, gdy zahaczymy o ziemię.

Nie jest to artykuł, w którym będziemy omawiać protokoły ESC, ale chciałbym, żebyście mieli świadomość, że po drodze przeszły one sporą ewolucję. Zaczęło się od PWM, które 50 razy na sekundę informowało regulator, jakie obroty powinien wymusić na silniku. Aby przesłać pojedynczy tylko kanał PWM potrzebowaliśmy 2ms (1/500 s), a cała ramka z 8 kanałami już stanowiła 16ms oraz 4ms pomiędzy kolejnymi zestawami danych. Oznaczało to 20ms na przesłanie stanu aparatury (manipulatorów i przełącznków). Łatwo policzyć, że w ciągu sekundy takich sygnałów mogło być właśnie 50 (50 * 20ms = 1000ms = 1s). No dobrze, co było dalej?
Wchodzące kolejno rozwiązania skracały skutecznie czasy przesłania pojedynczego kanału: Oneshot 125 (max. 250us = 1/4ms), Oneshot 42 (max. 84us = 1/12ms), Multishot (max. 25us = 1/40ms). Ten ostatni był najszybszym spośród analogowych sposobów przesyłania danych do ESC. Możemy policzyć, że zamiast 2ms w PWM, uzyskaliśmy 80 razy większą prędkość przesyłania danych.
O DShot już napisałem wcześniej, ale wspomnijmy tylko, że pierwsze wersje były wolniejsze niż Multishot, ale za to bardziej niezawodne. Jak wspomniałem, sygnał cyfrowy ma sumę kontrolną (bądź przynajmniej bit parzystości), które pozwalają ocenić, czy dane, które przyszły z ESC nie zostały przekłamane. To ważne, ponieważ lepiej, żeby regulator odrzucił błędne dane i podał ostatni znany sygnał, niż szarpał silnikami z uwagi na zakłócenia, których nie jest w stanie skorygować, ani rozpoznać. Dodatkowo, wspomniane już DShot Commands naprawdę się przydają.
Jeśli więc planujecie uruchomienie muzeum kopterów to celujcie w ESC z OneShot, najlepiej niewspierające Multishot, a już na pewno nowszych protokołów. Oczywiście taki sprzęt wciąż będzie latał, może nawet całkiem nieźle, ale dziś nawet tanie ESC obsługują przynajmniej DShot300/600, więc nie warto szukać tutaj oszczędności i kupować regulatorów, które tego nie wspierają. Podobnie z samym firmware - celujcie przynajmniej w BLHeli_S albo BLHeli_32. Tutaj zwracam uwagę, że czasem lepiej jest wziąć sprawdzone ESC z nieco starszym oprogramowaniem, niż tanim regulatorem, który chwali się BLHeli_32, ponieważ producent z pewnością nie inwestował w to, żeby wykorzystać pełen potencjał. Działa tutaj podobna reguła, jak w przypadku komputerów reklamowanych przez sieci handlowe - podaje się typ procesora i rozmiary ekranu, bo to działa jak magnes na konsumentów, ale również w świecie kopterów nie warto kierować się tak banalnymi elementami, tylko spojrzeć holistycznie na dany element i jego specyfikację. Warto też polegać na opinii tych, którzy na nich latają. HGLRC 28A, które można kupić naprawdę za grosze (mówię tu o kwotach rzędu 3$), niektórym oczywiście się popaliły, ale w opinii wielu pilotów to naprawdę łakomy kąsek i nawet jeśli oznacza to, że kupią 6 sztuk i potem jedno, czy dwa ESC wymienią to i tak warto, jeśli składamy coś budżetowego.
Silniki 1804 i kolejne generacje
Jeżeli coś w FPV rozwija się błyskawicznie to z pewnością są to silniki, za których rozwojem nie mogą nadążyć pakiety Li-Po. Warto też wspomnieć, że wiele modeli rośnie - albo wszerz, albo wzwyż. Dla przypomnienia - oznaczenie silnika bezszczotkowego to np. 2205 2300KV. Pierwszy blok cyfr to wielkość stojana - wewnętrznej części silnika, na którą nawinięte zostało uzwojenie, które pełni funkcję elektromagnesu rozpędzającego wirnik. Z naszej perspektywy istotne jest to, że im większy stojan, tym więcej mocy możemy "wycisnąć" z silnika. Oczywiście nie jest to jedyny parametr - dla ciekawskich powiem, że rolę pełni też odległość magnesów wirnika od stojana, typ magnesów neodymowych, kształt (zaokrąglone będą na większej powierzchni przylegały) i pewnie parę innych rzeczy, których nie jestem świadomy. Wracając do rozmiarów. W liczbie 2205 ukryte są dwa parametry - średnica i wysokość stojana wyrażone w milimetrach, każda z użyciem dwóch cyfr. W tym przypadku byłoby to 22mm średnicy i 5mm wysokości. Silnik 2305 byłby minimalnie szerszy (23mm), zaś jednostka 2207 będzie o 2mm wyższa (7mm zamiast 5mm).

Dodatkowo, silnik 2204 sprzed 2 lat może pracować gorzej, niż jego dzisiejszy odpowiednik. Mam w kopterach Emaxy 2205 2300KV, natomiast już można dostać jednostkę np. 2208 (https://demonrc.eu/product/drc-inferno-v2-motor-2208-2550kv/). Prócz surowej mocy, którą możemy osiągnąć, znaczenie ma też płynność jego działania, szybkość z jaką będzie się rozpędzał, odprowadzanie ciepła, czy wreszcie zachowanie na niskich obrotach (tzw. "dół") i przy pełnych - tzw. "góra". Nie jestem tak biegły, aby wypowiadać się o szczegółach i różnicach pomiędzy silnikami, ale jedno jest pewne - dziś zapewniają one w szczególności dużo lepsze wrażenia z latania, w dużej mierze z uwagi na kulturę pracy i ogromny ciąg, jaki są w stanie zagwarantować. Jeżeli tylko nasze ESC to wytrzymają, kopter z łatwością można dziś wyprowadzić ze swobodnego pikowania ku ziemi (tzw. "dive") w dużo krótszym czasie wyhamowując prędkość, z jaką zbliżamy się ku ziemi. Szczególnie doświadczeni piloci mogą w tym względzie wiele powiedzieć.
Wracając do tematu. Mój pierwszy kopter miał silniki 1804 i na 3S dało się latać, na 4S było nawet nieźle, ale umówmy się - do dzisiejszych modeli Freestyle sporo brakowało. Swego czasu pisałem o stosunku mocy do masy, ale prawda jest taka, że zawsze można ograniczyć gaz na samej aparaturze, redukując maksymalną moc i w ten sposób uczyć się latać. Jest jednak wiele momentów, w których nadmiarowy ciąg może nas uratować przed pewnym spotkaniem z ziemią. Ponadto, dzisiaj symulatory przyzwyczajają nas do coraz dynamiczniejszych kopterów i pomagając znajomym wejść w świat FPV, widzę, że po paru godzinach w symulatorze są w stanie spokojnie prowadzić współcześnie złożony kopter - wszystko zależy wyłącznie od pochylenia kamery.
Śmigła
Wychodząc polatać kopterem, dziś zabieramy ze sobą parę worków śmigieł, ale trzeba się naprawdę postarać, żeby wykorzystać choć jeden. Kiedy zaczynałem, zapomnienie o kluczu nasadowym, który pasował do nakrętek na silnikach było gwarantem szybkiego powrotu do domu. Śmigła wykonane z poliwęglanu pękały przy kontakcie z najdrobniejszą gałązką, a co więksi szczęśliwcy potrafili je połamać nawet lądując w trawie. Motywacja do nierozbijania koptera była więc naprawdę wysoka. Należy też pamiętać, że niektórzy do dziś mają parę worków 2-płatowych śmigieł 5030 - nie wyłączając autora tego wpisu. Ich żałosny zupełnie skok w połączeniu z tym, że miały tylko 2 płaty powodowało, że kopter przy pomyślnych wiatrach był w stanie nie tylko podnieść własny ciężar, ale nawet kamerę do nagrywania w trakcie lotu. Połączmy to z pakietami 3S i otrzymamy prawdziwego latającego osiołka, który podejmował nierówną walkę z, odkrytą przez Newtona, grawitacją.

W temacie śmigieł zmieniło się naprawdę wiele. Po pierwsze najczęściej kupimy teraz 3-płatowe ze względu na dobry balans między stabilnością w locie i ciągiem, jaki zapewniają. Owszem, po drodze były eksperymenty z 4 płatami (takie śmigła widujemy teraz w mniejszych kopterach), 5-cioma, a nawet 6-cioma, co dawało ciekawe efekty w powietrzu, ale finalnie się nie spopularyzowały.
Drugim aspektem jest budowa samego śmigła. W tym temacie naprawdę wiele czasu poświęcono zarówno samemu kształtowi, jak i różnym wartościom finalnego skoku. Przykładowo są śmigła typu Bullnose, mające spłaszczone krawędzie, albo Fishbone, których końcowa część płata ma ząbkowane wykończenie przypominające rybią łuskę - stąd nazwa. Międzyczasie eksperymentowano też z ekstremalnym skokiem. Śmigła, na których zaczynałem miały oznaczenie 5030, czyli 5" średnicy i 3" skoku - pochylenie płata było względnie niewielkie, a więc i ciąg. Latałem też jednak na 5050, które miały już skok 5" i były interesująco wygięte. Na dzień dzisiejszy Freestyle w zakresie 5" kopterów wykorzystuje śmigła gdzieś w granicach 5040-5045. Wyścigowe modele mogą mieć 5048, albo wręcz 5152 (5.1" średnicy i 5.2" skoku), co wynika z większego zapotrzebowania na ciąg i prędkość maksymalną. Jest to uproszczenie, ale daje odpowiednie wyobrażenie.
Ostatnia kategoria, najważniejsza, to materiały. Mimo, iż na pierwszy rzut oka zdawałoby się, że wizualnie niewiele się zmieniło, dzisiejsze śmigła naprawdę wytrzymują tak wiele, że nawet piloci z dużym doświadczeniem dają się zaskoczyć ich trwałością. Wspomniałem już, jak wyglądało łamanie śmigieł, gdy zaczynałem latanie. Dziś nawet po spotkaniu z solidną przeszkodą, albo uderzeniu w ziemię najczęściej śmigła albo się wyszczerbią, albo wygną, a i o to nie jest łatwo. W wielu przypadkach kolizja z gałęzią drzewa, czy bramką może jedynie wytrącić kopter z równowagi, ale tak szybko jak spadł, tak szybko się podniesie. Oczywiście, nie ma rzeczy niezniszczalnych, aczkolwiek trwałość dzisiejszych śmigieł jest naprawdę imponująca i o ile nie latamy bardzo ostro, starczą nam na o wiele dłużej, niż wczesne generacje.
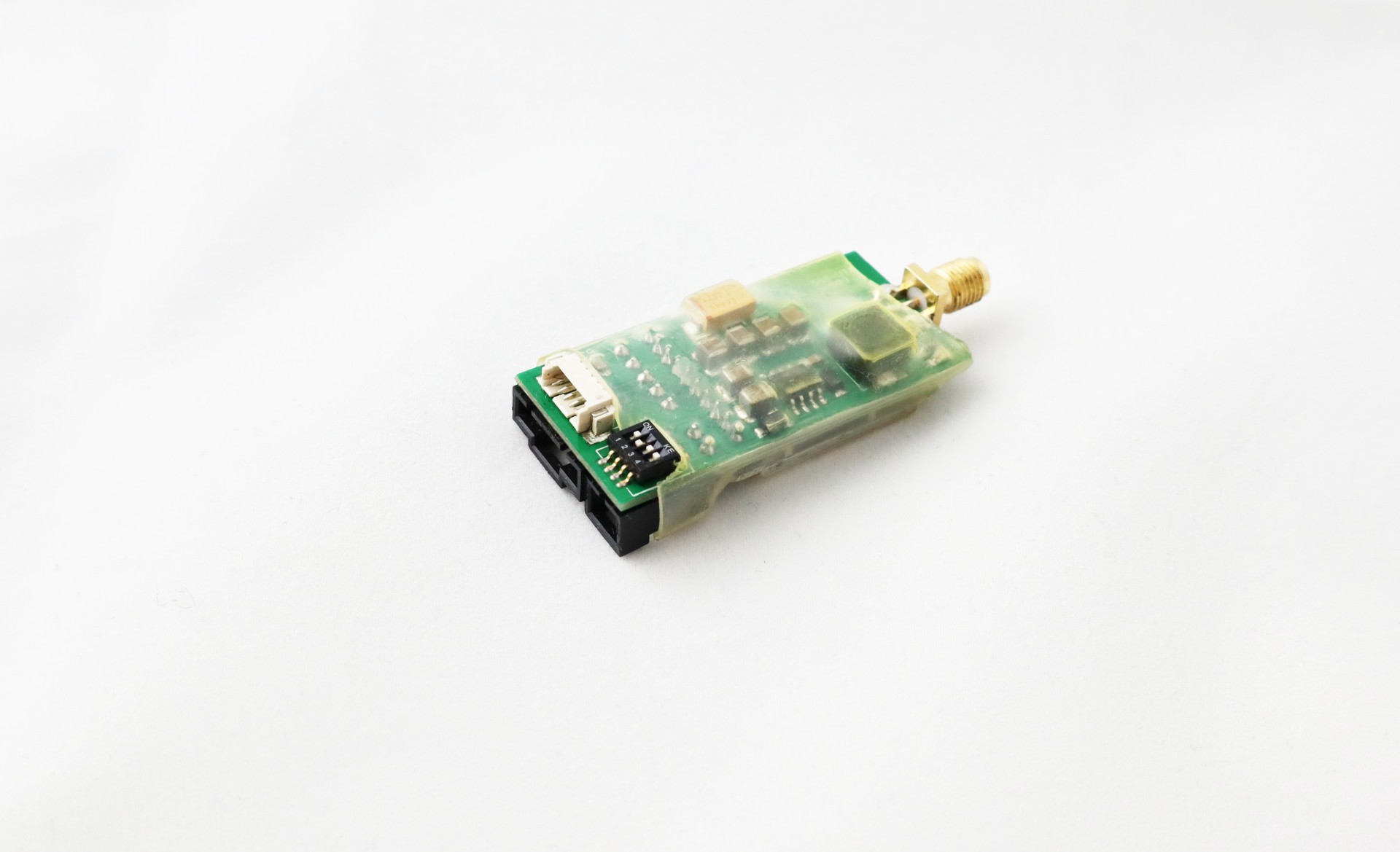
Nadajnik FPV
Urządzenia te, podobnie jak większość, poczyniły naprawdę solidny skok w przód. Uległy znacznej miniaturyzacji, a dodatkowo zostały dostosowane do pracy w środowisku, gdzie wielu pilotów ściga się naraz. Po pierwsze, nadajniki marek takich jak TBS, ImmersionRC, a także FuriousFPV w najmniejszym stopniu zakłócają sąsiednie kanały, trzymając się zadanej częstotliwości pracy. Tanie i starsze nie dawały gwarancji, że kolega latający w paśmie przesuniętym o 50Mhz nadal będzie miał czysty obraz. Dodatkowo, przy włączaniu, wyłączaniu i zmianie kanałów, nadajniki potrafiły solidnie zakłócić bardzo szerokie spektrum, mimo iż w ogóle w okolicy tamtych częstotliwości nie nadawały. Podczas wpinania baterii, czy zmiany kanału, potrafiły na sekundę skutecznie "zabrać" obraz pozostałym pilotom, szczególnie gdy nasz kopter znajdował się dużo bliżej, niż ich, co było naturalne, gdy dopiero startowaliśmy. Popularne określenie, że nadajnik "sieje" właśnie to oznaczało. Osoba latająca na nim mogła mieć niezły obraz, ale skutecznie zakłócał on częstotliwości, na których w ogóle nie powinno go być utrudniając latanie innym. Jest to częściowo powiązane także z antenami i niektóre z nich lepiej nadają się do latania w grupie niż inne, z czego zdaje się, że nieprzerwanie rządzą Pagody.

Nowoczesne odbiorniki mają m.in. Pit Mode, który pozwala uruchomić go z minimalną mocą, która nie zakłóci obrazu w odbiornikach wokoło, ale gdy będziemy siedzieć blisko, my obraz złapiemy. Określenie wzięło się z właśnie z wyścigów i Pit-stopu, czyli miejsca, gdzie na wymianę opon i tankowanie paliwa zjeżdżają kierowcy w Formule 1. Piloci FPV siedzą przy stolikach i przygotowują sprzęt do wyścigu, albo naprawiają go pomiędzy biegami. Aby sprawdzić, czy kopter działa, kiedyś trzeba go jednak włączyć. W trakcie gdy trwa inny bieg, włączający się nadajnik mógłby zakłócić wizję któremuś z zawodników. Dzięki Pit-mode, nadajnik włącza się z tak minimalną mocą, aby nikt inny tego nie zauważył.
Ostatnią, bardzo pożyteczną cechą jest SmartAudio. Dobrych parę lat temu kanały zmieniało się poprzez przestawianie mikroprzełączników (tzw. dip-switchy). Wymagało to ostrego narzędzia i dużej precyzji. Było też uciążliwe. Współczesne nadajniki mają fizyczny przycisk, którym możemy zmienić zarówno pasmo, kanał, jak i moc. Nie zawsze jednak nadajnik FPV jest łatwo dostępny. Z uwagi na to, że większość pilotów kopterów nie używała transmisji dźwięku - był do tego osobny pin Audio w nadajniku, postanowiono stopniowo zacząć go wykorzystywać do odbierania sygnałów sterujących nadajnikiem. Właściwie wszystkie współczesne kontrolery lotu pozwalają zmieniać opcje nadajnika FPV z użyciem OSD. Wchodząc do menu, które nałożone zostaje na obraz z kamery, przechodzimy do opcji nadajnika, tam wybieramy zarówno pasmo (band), kanał (channel), jak i wyjściową moc (power). Wszystko to możemy zmienić bez ściągania gogli, a tym bardziej próby dobrania się do przycisku na samym nadajniku.
Dwóch producentów opracowało niezależne rozwiązania: TBS - SmartAudio oraz ImmersionRC - Tramp Telemetry. Inne firmy takie jak Eachine też próbują implementować to rozwiązanie, ale nie zawsze można być pewnym ich zgodności. Z dużą dozą zaufania można kupować gotowe koptery, które chwalą się SmartAudio, gdyż w tym wypadku kompatybilność jest już sprawdzona. Sporo modeli już chwali się tą opcją i warto z niej skorzystać.
Podobnie jak miniaturyzują się same nadajniki, za tym idą też złącza antenowe, które zwykły zajmować sporo miejsca na płytce. Rynkowe standardy: SMA i RP-SMA powoli ustępują miejsca złączom MMCX i u.fl. Wiąże się to też z próbą zmniejszenia sztywności połączenia anteny i nadajnika, ponieważ urwane gniazda są częstym problemem. Z tego samego względu anten dziś nie mocuje się pionowo, prostopadle do osi koptera, ale wzdłuż. Nawet gdyby nieznacznie miało to pogorszyć sygnał, drastycznie wpływa na trwałość całego rozwiązania. W kopterach wyścigowych antena nieznacznie tylko wystaje poza obrys i jest mocowana tak, żeby przy uderzeniu ugiąć się, co utrudni jej wyrwanie.
Jeśli planujemy założyć własne muzeum potrzebujemy możliwie największego gabarytowo nadajnika. Koniecznie też musi mieć dip-switche, które same w sobie zajmą sporo miejsca, a dodatkowo będą wymagały ostrego narzędzia, aby je przestawić. Nadajnik obowiązkowo mocujemy opaskami zaciskowymi (zwyczajowo zwanymi "trytytkami"), co powinno zagwarantować wyrwanie dowolnego elementu z płytki podczas uderzenia. Nadajnik z anteną warto w ogóle zamocować na wierzchu górnej części ramy. Daje to naprawdę spore prawdopodobieństwo wyrwania nadajnika wraz z anteną podczas upadku. Świetna sprawa, jeśli zamiast latać lubimy tylko dłubać przy kopterze!
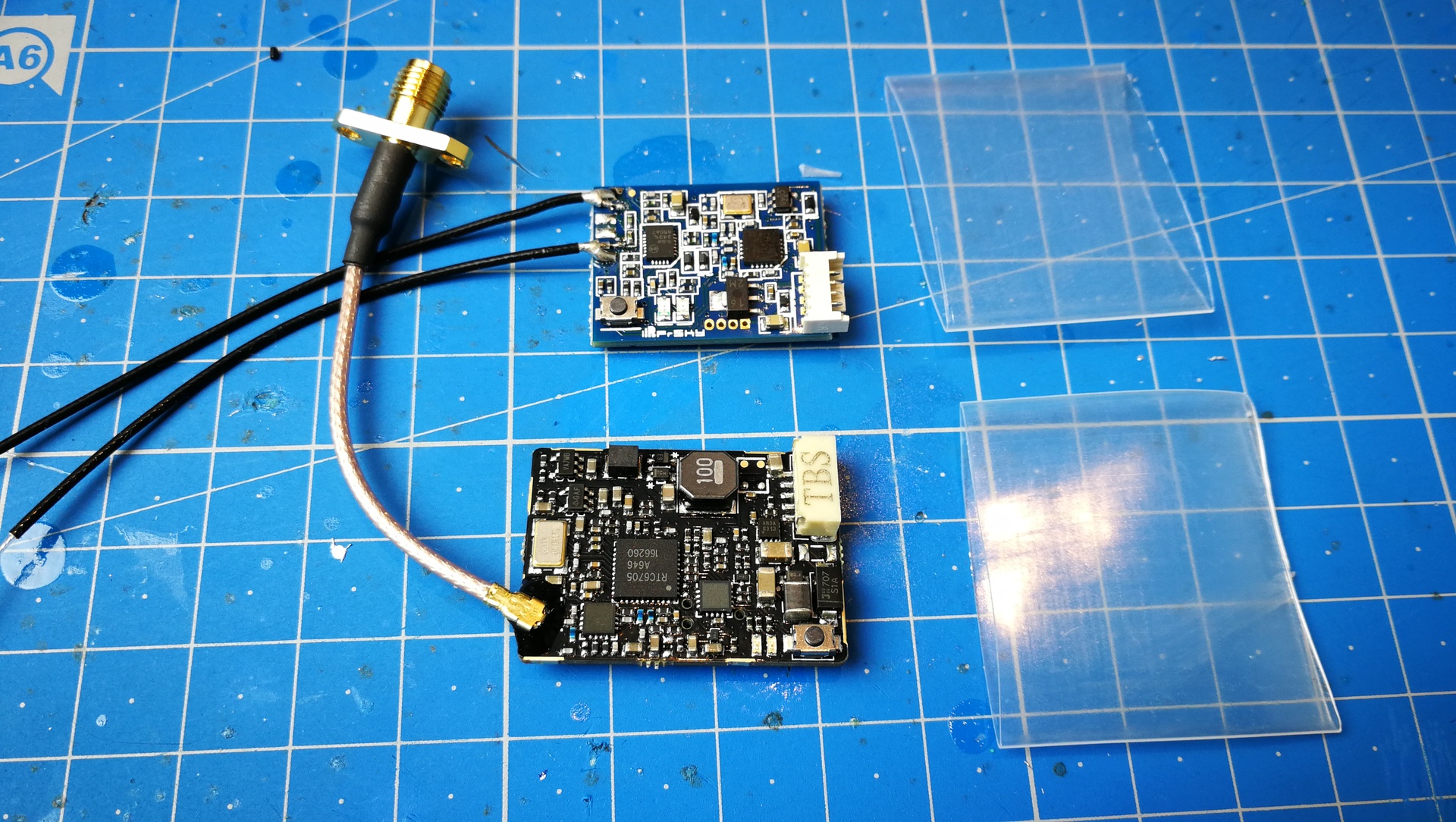
Odbiornik
Miniaturyzacja elektroniki nie ominęła odbiorników. Dawniej toporne, z osobnymi wyjściami PWM na każdy kanał, zostały zastąpione niewielkimi, o równie dobrym zasięgu, ale z pojedynczym gniazdem i na ogół 3 lub 4 przewodami, które z niego wychodzą. Kiedy pisałem swoje artykuły DIY, protokoły PWM, PPM, cPPM wciąż były używane - dziś w zasadzie się do nich nie wraca. Na pewno wciąż aktualny jest SBUS (FrSky), i-Bus (FlySky), czy DSMX (Spektrum). Wśród topowych rozwiązań króluje CSRF, który wspierają m.in. zestawy CrossFire od TBS, ale to już drogie zabawki.
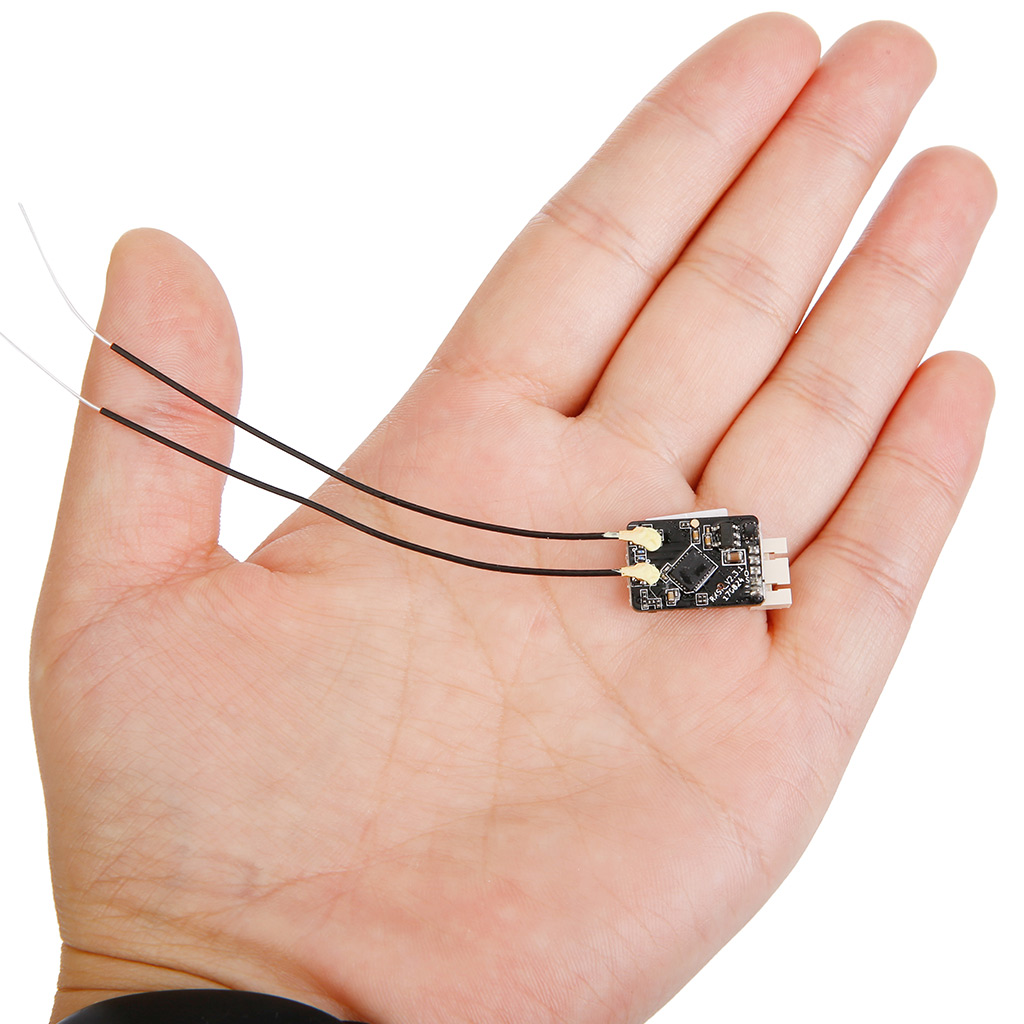
Współczesny odbiornik ma być mały i nie powodować plątaniny kabli. W ramach możliwości polujmy na modele Diversity, czyli posiadające dwie anteny. Wśród sprzętu FrSky będzie to m.in. XM+, R-XSR, XSR (nieco starszy i większy niż R-XSR).
Źródło: Helipal.com
Jeżeli oczywiście celujemy w model muzealny to koniecznie musimy pomyśleć o takim, który ma 3-pinowe złącza PWM dla każdego kanału osobno (np. FrSky V8FR-II). Zajmują one sporo miejsca i dziś są totalnie niepotrzebne, bo nawet najprostsze odbiorniki powinny obsługiwać SBUS, czy i-Bus, a więc zamiast przesyłać każdy kanał osobno (każdy manipulator zajmuje 2 kanały, a przełączniki po jednym) i mieć 8 przewodów wychodzących z modułu, cały sygnał możemy przesłać jednym.
Dzisiejsze odbiorniki są po prostu umieszczone wewnątrz rurki termokurczliwej, aby ich gabaryty były możliwie ograniczone. Jeśli jednak celujemy w model muzealny, obowiązkowo powinien on mieć wielką, plastikową obudowę. Zajmie ona sporo miejsca, więc możemy zapomnieć o niskoprofilowej ramie, a dodatkowo kolorowe kable, które nie zostaną odpowiednio skrócone, dodadzą koloru całej konstrukcji.
Podsumowanie
Budowanie kopterów z roku na rok ulega zmianie. Mojemu poradnikowi DIY ktoś słusznie zarzucił, że jest nieaktualny i to prawda. Gdy był pisany, miał jeszcze sens, natomiast dziś części są zupełnie inne. W miarę współczesne metody składania i łączenia elementów wyjaśniałem przy okazji wpisów o 225-tce oraz składaniu koptera wyścigowego. O ile metody są aktualne, części poszły do przodu, więc ich listą również nie warto się przejmować.

Jeśli chodzi o koptery do kupienia i poskładania samemu - podałem czego wyraźnie unikać. Należy wyraźnie rozróżnić tanie od przestarzałego. Można kupić tanie ESC, które mają świeże oprogramowanie, ale częściej ulegają awarii, albo bardzo wiekowe, niepotrzebnie duże regulatory działające w oparciu o nieaktualne już oprogramowanie. Podobnie z kontrolerem lotu, na który nie będziecie mogli wgrać Betaflight. Współczesny może być nieco droższy niż CC3D, ale możliwość uruchomienia Betaflight 4.0, albo nawet 3.5 skutecznie przyćmi to, co potrafi LibrePilot, a i łatwo otrzymamy pomoc, gdyż zdecydowana większość osób na grupach z tego właśnie korzysta.
A właśnie - rzecz ostatnia. Na grupach i forach często nowicjusze słyszą, że mało kto im pomoże, bo to przestarzałe i nikt na tym nie lata. Jakkolwiek bolesne - jest w tym sporo prawdy. To, że sprzedaje się wciąż kontrolery lotu, ramy, czy ESC sprzed 4 lat jest nieporozumieniem, ponieważ jest to sprzęt, który nie jest w żaden sposób dostosowany do dzisiejszych standardów. Nie da się go poprawić (np. uruchomić nadajnika FPV ze SmartAudio), nie pasują do niego współczesne części (np. kamery FPV do QAV250) i jest po prostu ciężki i toporny. Realną alternatywą na takie przestarzałe części jest zakup taniego kompletu, nawet takiego Eachine Tyro99. Owszem, kamera właściwie powinna pójść do kosza, ale reszta naprawdę będzie latać dużo lepiej, łatwiej będzie go skonfigurować, łatwiej otrzymać pomoc i podpowiedź, a koszt będzie taki sam. Powiem jeszcze raz - lepiej kupić tani, ale współczesny, niż tani, ale z zeszłej epoki, bo to bardzo szybko się zemści. Serio.