
Z roku na rok dostajemy lepsze i mniejsze części do budowy własnych kopterów. Dzisiejszy kontroler lotu będzie miał już procesor F4 albo F7. Zeszłoroczny częściej miałby F3. Odbiorniki także maleją, a popularyzacja TBS Crossfire i FrSky R9 przy okazji dała nam miniaturowe płytki. Bardzo pocieszająca jest też integracja wielu elementów w ramach kontrolera lotu i ESC. Dziś kupno PDB, czyli płytki dystrybucji zasilania w zasadzie nie jest konieczne, bo FC ma swój własny regulator napięcia i wyprowadzenia do podłączenia do nich ESC, bądź też te ostatnie łączymy tylko z kontrolerem lotu przy pomocy jednej wieloprzewodowej taśmy. Składanie kopterów uległo znacznemu uproszczeniu i trend jest podobny, jak w komputerach. Coraz więcej elementów pasuje do siebie nawzajem, a producenci sami dołączają wtyczki pasujące do popularnych komponentów. Z uwagi na to, że niedawno skończyłem składanie kolejnego modelu 5-calowego, tym razem z GPS, zachęcam Was do przejścia, wraz ze mną, procesu składania i łączenia ze sobą wszystkich elementów.
Dobór części
Na początek spójrzmy z jakich elementów powstanie nowy kopter. Oczywiście jest to wyłącznie mój, tym razem nienajdroższy wybór i ze wszech miar nie powinna być to konfiguracja wzorcowa, tylko propozycja jak można zestawić ze sobą poszczególne elementy.
Rama
Tutaj opcji jest bardzo wiele. Nie chciałem tym razem płacić 100$ zarówno za DemonRC Blaze, czy Armattan Marmotte. Uważam, że to bardzo dobre ramy i warte swojej ceny, ale nie zawsze chcemy i możemy latać na komponentach tzw. high-end. Ja postawiłem na firmę GEPRC i model KHX-5. Tym niemniej na włóknie węglowym nie da się zaoszczędzić. Tańsze będzie po prostu gorszej jakości. Ostatnio składałem przyjacielowi Armattana Marmotte. Włókno węglowe połyskujące z każdej strony, wygładzone krawędzie i tytanowa klatka na kamerę - moja rama przy tym wyglądała jednak nie aż tak okazale.

Oprócz tego rama jest zabudowana także z boku, więc mniej brudu powinno dostawać się do środka. Z kolei klatka na kamerę wykonana jest ze stopu aluminium i na pewno nie będzie tak trwała jak tytan w Armattanie, ale wygląda naprawdę solidnie.
Sprzęt od GEPRC ma jednak i tak szereg zalet. Ramiona z silnikami możemy zamocować zarówno u góry, a elektronikę umieścić pod spodem, albo tradycyjnie ramiona od spodu, wyżej wszystkie elementy i na wierzchu baterię. W pierwszym wariancie środek ciężkości jest bliżej geometrycznego środka, więc kopter powinien lepiej radzić sobie z przewrotami. Dodatkowo umieszczenie ramion u góry powoduje, że przewody od silników mogą biec pod spodem, a więc będą wolne od ryzyka bycia rozciętymi przez śmigła podczas upadku.
Włókno węglowe jest przyzwoitej grubości (ramiona mają 4mm) i o ile nie okaże się, że ich wąski profil jest podatny na łamanie - będzie to całkiem zadowalające. Warto też zwrócić uwagę, że w komplecie znajdują się LED-y oraz buzzer, które są zamocowane na specjalnej płytce, którą włożymy z tyłu koptera. Miłe udogodnienie, ponieważ nie musimy ich dokupywać osobno. Zarówno fabryczne oświetlenie, jak i brzęczyk przydadzą się, gdy będę szukał koptera w trawie.

(Źródło: https://geprc.com/product/gep-khx5-elegant/)
W zestawie dostajemy też mocowanie z TPU i rurki przez, które poprowadzimy anteny. Mamy możliwość ustawienia ich albo w kształt T - wymagany przez anteny dipolowe od rozwiązań na 868MHz, albo też Y, gdzie obie anteny będą obrócone względem siebie o niecałe 90 stopni. Jak na ramę za niecałe 250 zł to dostajemy bardzo bogaty zestaw.
Kontroler lotu (FC)
Sercem każdego koptera jest kontroler lotu, więc to jeden z podstawowych wyborów, których dokonamy. W średnim segmencie poleca się Kakute - do wyboru jest wersja z procesorem F4 oraz F7. Uznałem, że zadowolę się wersją F4 V2, która jest mniejsza niż F7 AIO, a ponadto planowałem użyć ESC 4w1, które mocuje się "na kanapkę" - zaraz pod kontrolerem lotu.

Ma on sporo ciekawych rozwiązań, które czynią go godnym rozważenia zakupem. Po pierwsze - żyroskop jest mocowany na zewnętrznej płytce połączonej taśmą z głównym modułem. Całość opiera się na gąbce, która izoluje czujnik od wibracji. Po złożeniu i wstępnym oblataniu koptera mogę potwierdzić, że to rozwiązanie działa. Lot jest "gładki" i na domyślnych ustawieniach nie ma czego się przyczepić. Same wibracje, bo o tym też warto wspomnieć, pojawiają się na skutek wielu różnych czynników. Ogólnie powodowane są przez pracujące silniki i śmigła. Te ostatnie nie zawsze są proste i idealnie wyważone (choćby po upadku), zaś same silniki też nie muszą pracować zupełnie "gładko". Wreszcie z uwagi na duży zakres obrotów silnika, niektóre elementy mogą wpadać w drgania rezonansowe, zaś całość przenosić się będzie na kontroler lotu, tym mocniej, im całość konstrukcji jest sztywna. Każdy kopter będzie miał trochę inną charakterystykę, a i nasz sposób montażu elementów wpłynie na końcową charakterystykę lotu i to, ile wibracji trzeba będzie odfiltrować. Właśnie - w Betaflight i każdym innym oprogramowaniu zostały zaimplementowane filtry, których zadaniem jest wycinanie drgań z odczytów żyroskopu, aby mógł on poprawnie interpretować to, co dzieje się z kopterem. W sprzętach, które mają więcej drgań filtry obejmują szerszy zakres częstotliwości. W dużej mierze da się jednak wyeliminować dużą część niedogodności. Tym niemniej w swoich kopterach staram się montować silniki na podkładkach, które tłumią wibracje i jeśli mam taką możliwość, również sam kontroler staram się przynajmniej oprzeć na gumkach, które również wyeliminują część drgań, nim dojdą do kontrolera lotu. W przypadku Kakute V4 sztywny montaż nie jest problemem. Z kolei taśma, która biegnie pomiędzy płytką, a modułem żyroskopu jest słabym ogniwem i należy zerkać, czy nie została zerwana, albo naruszona, szczególnie gdy kopter wpadnie gdzieś w krzaki i jest szansa, że coś dostało się w okolice elektroniki - gałązki, liście, trawa itd.
Dużą zaletą Kakute F4 V2 są też porty z automatyczną inwersją sygnału. Odbiorniki FrSky podają sygnał SBUS oraz S.Port w postaci odwróconej - z punktu widzenia sygnału cyfrowego, tam gdzie jest '1' - 5V otrzymujemy 0V, zaś tam gdzie '0' - 0V, pojawia się 5V. Wykres sygnału w czasie jest więc odbity względem osi poziomej. W praktyce powoduje to, że procesor, który otrzymuje taki sygnał musi wpierw go odwrócić, aby poprawnie dał się zinterpretować. Jeśli podłączymy sygnał SBUS z inwersją do pinu, na którym nie ma inwertera, nie zostanie od poprawnie odczytany przez kontroler lotu i de facto nie będziemy widzieć nic w zakładce "Receiver" w BetaFlight. W procesorach F3 i F7 inwersja jest zapewniona przez sam procesor, zaś F4 dla odmiany tego nie posiadają. Odbiorniki FrSky pozwalają podłączyć sygnał nieodwrócony (non-inverted), ale wymaga to dolutowania przewodu do jednej z nóżek układów na samym odbiorniku (https://oscarliang.com/uninverted-sbus-smart-port-frsky-receivers/). W zamian producenci zorientowali się, że kontrolery lotu potrzebują wejścia sygnału odwróconego, wobec czego zaczęto obchodzić kwestię słabości procesora F4. Kakute F4 V2 na jednym ze złącz UART ma wejścia z automatyczną inwersją - niezależne od rodzaju sygnału wejściowego, przez co pozwala do siebie podłączyć odbiornik od FrSky bezpośrednio wraz z telemetrią przesyłaną poprzez S.Port.
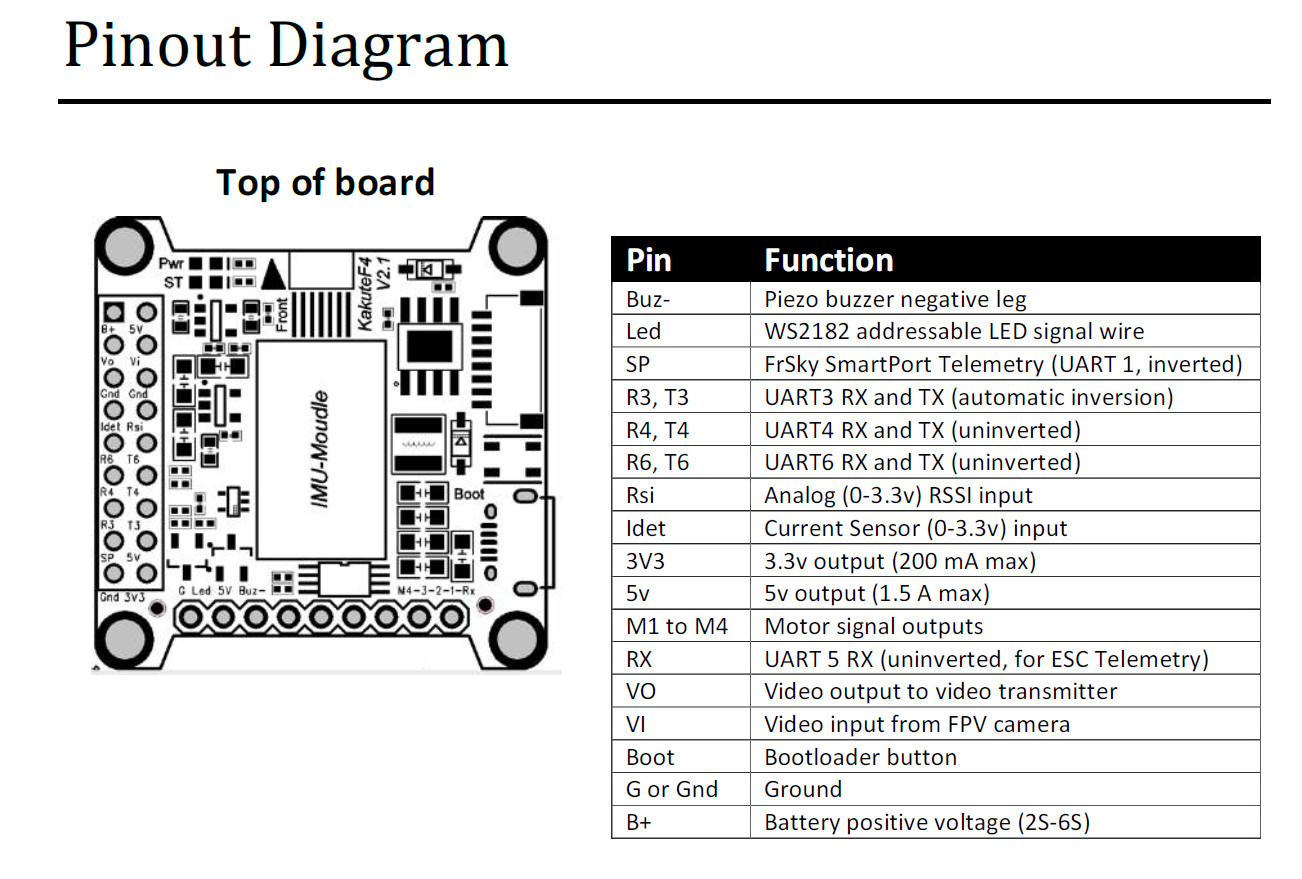
Liczba złącz UART nie jest też bez znaczenia. To skrót od Universal Asynchronous Receiver-Transmitter, czyli taki odpowiednik USB w elektronice. Ważne jest to, że zarówno SmartAudio, GPS, czy nowsze kamery FPV - wszystkie korzystają właśnie z tego typu złącza. Poznamy je często po oznaczeniach RX, TX we wtyczkach poszczególnych urządzeń. Kakute F4 V2 posiada w sumie 3 UARTy - idealnie by podłączyć odbiornik z S.Port, GPS oraz SmartAudio do sterowania nadajnikiem FPV. Dodatkowo same złącza są dobrze i dokładnie opisane, a instrukcja nie pozostawia złudzeń co, z czym połączyć.
Regulatory obrotów (ESC)
Kupując dowolny kontroler lotu warto od razu pomyśleć o ESC, które będziemy chcieli z nim połączyć. Wbrew pozorom jest o czym myśleć. Są kontrolery lotu z wbudowaną dystrybucją zasilania (PDB), które mają od razu wyprowadzone punkty lutownicze dla pojedynczych ESC - zarówno do zasilania, jak i sygnałowe. Najczęściej znajdują się one na rogach, aby ułatwić lutowanie. Oprócz tego, taki kontroler lotu ma na ogół pola lutownicze dla przewodów zasilających zakończonych XT-60. Jeśli kupimy ESC 4w1, to i tak nie wykorzystamy tych punktów, a to tylko niepotrzebna masa i strata miejsca na inne pady lutownicze, szczególnie jeśli będziemy mieć dużo akcesoriów podłączonych do kontrolera lotu (np. GPS, VTX ze SmartAudio, Smartport od odbiornika itd.).
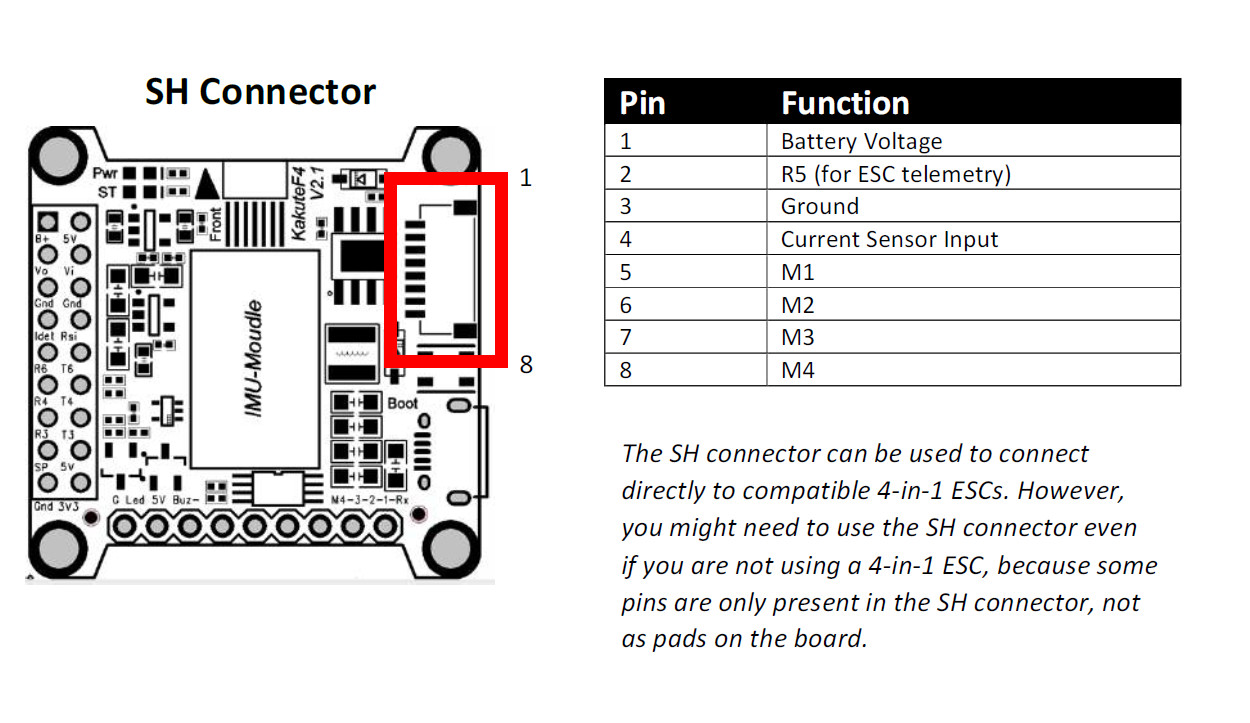
Z kolei decydując się na kontroler lotu z dedykowanym portem do podłączenia ESC upraszczamy sobie montaż, ale nie każdy regulator będzie dobrze grał z każdym kontrolerem lotu. Zacznijmy od tego, że ESC 4w1 mają bardzo różne konfiguracje odnośnie liczby i układu wyjść. Może się okazać, że kontroler lotu ma wtyczkę z 6 pinami, podczas gdy ESC ma 8. Oczywiście możemy poprzekładać je odpowiednio, ale to narobi nam dodatkowej pracy. Dodatkowo, są ESC, które mają już wbudowane różne regulatory napięcia i np. podają do kontrolera lotu VBAT (napięcie Li-Po - np. 4S - 15.2V), 10-12V do zasilania nadajnika i innych akcesoriów oraz 5V dla samego kontrolera lotu i reszty elektroniki, która akceptuje tylko takie napięcie. Bywa jednak, że kontroler lotu oczekuje, że otrzyma zarówno 5V, jak i 12V oraz VBAT, a ESC wyprowadzają wyłącznie 5V i oczekuje, że resztą zajmie się kontroler lotu. Ważne jest to, że każde ESC na pewno podaje sygnał z każdego regulatora (S1-S4) oraz GND, który jest wymagany, aby mieć punkt odniesienia mierząc wchodzący sygnał. Reszta zależy już od ESC.

(Źródło: http://www.holybro.com/product/tekko32-4in1-esc-35a/)
Kupując FC i ESC sprawdźmy, jakie wyprowadzenia są w gnieździe regulatora obrotów i kontrolera lotu i czy uda się nam je zgrać. Po zakupie będzie za późno na takie rozważania, a możemy sobie bardzo utrudnić lutowanie. Wystarczy, że kupimy VTX (nadajnik FPV), który akceptuje napięcia od 7V-24V, a ESC nie będzie miał regulatora 10V lub 12V. Wtedy kontroler lotu mimo, iż będzie miał piny wyprowadzające takie napięcie będzie oczekiwał, że dostarczy je poprzez wtyczkę samo ESC ze swojego regulatora. Jeżeli ten warunek nie będzie spełniony, bo ESC wyprowadza na przykład tylko 5V i VBAT, będziemy musieli ciągnąć zasilanie wprost z pól lutowniczych, do których dochodzi główny przewód zasilający. Jest to mało wygodne i komplikuje konstrukcję. Nie ma problemów nie do rozwiązania, ale też nie ma sensu nadmiernie komplikować sobie życia.
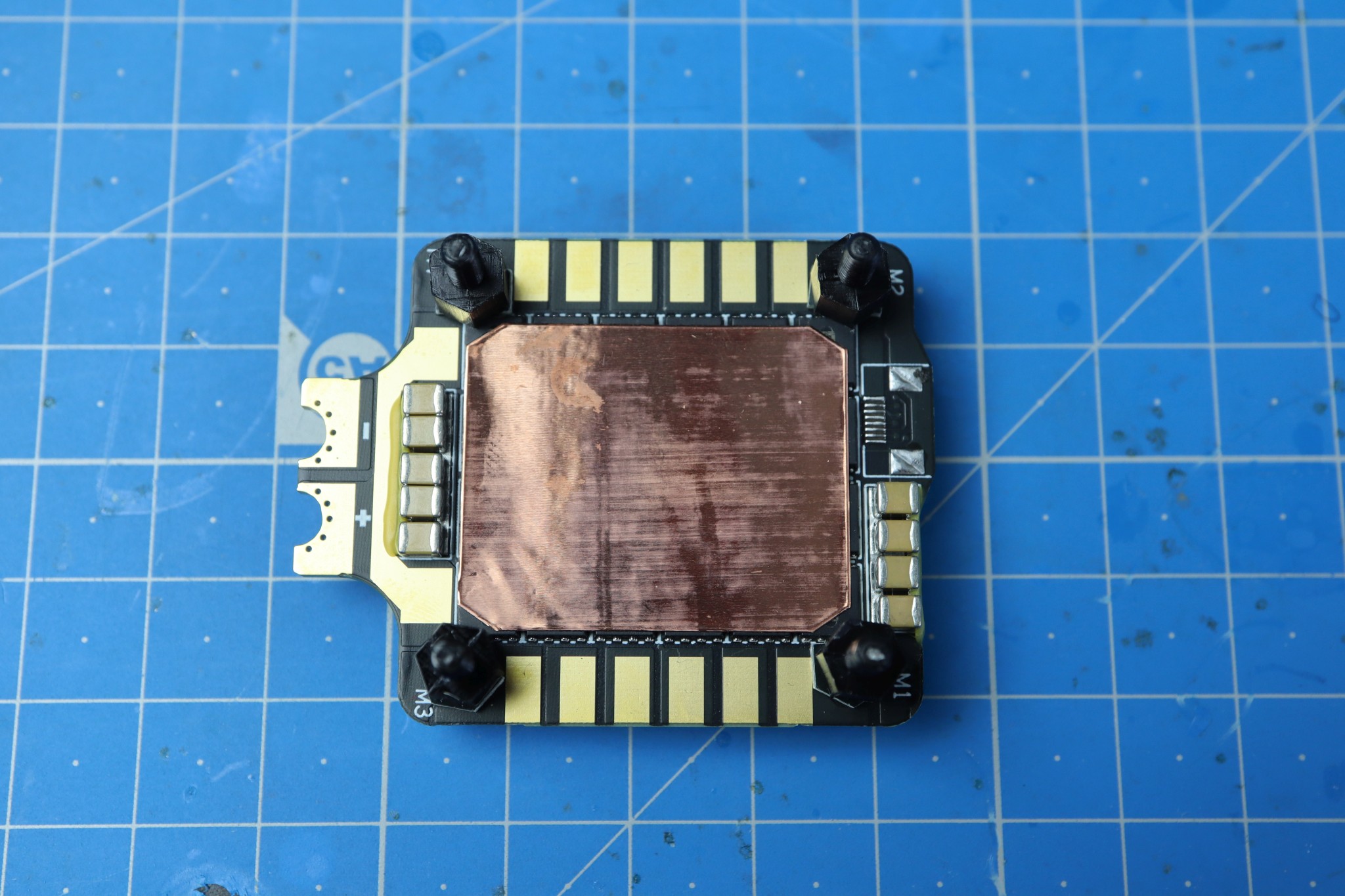
Po tym długim wstępie mogę już zdradzić, że kupiłem Tekko32 35A 4in1. Jest to solidny regulator napięcia, a dodatkowo jest sprzedawany w komplecie z Kakute F4 V2, co powoduje, że oba są ze sobą w 100% zgodne i ich połączenie wymaga przewodu, który po obu stronach ma tyle samo pinów, a kolejność wyjść w FC i ESC jest taka sama, więc nie musimy przekładać przewodów.

Ramiona są wąskie, a ponadto i tak planowałem puścić przewody pod nimi, więc znalezienie ESC, które byłoby na tyle małe, żeby się tam zmieścić nie byłoby takie proste, a ponadto i tak w środku jest wystarczająco miejsca, aby umieścić obie płytki. Gdyby była to niskoprofilowa rama (np. ChilliFPV Kelpie, czy DemonRC Blaze), lepiej zostawić sobie przestrzeń i postawić na ESC mocowane na ramionach.
Silniki
W tej kategorii można wybierać i przebierać, a niezliczone opinie mocno się od siebie różnią i każdy poleca coś innego. Nie latałem dotychczas na T-Motorach, HypeTrainach, czy XING-ach, więc moje rozeznanie odnośnie silników nie jest zbyt wielkie. Tym niemniej zawsze dobrze dogadywałem się z EMaxami i bardzo lubiłem tzw. red bottoms - RS 2205 2300KV.

Z uwagi na to, że dziś są dużo mocniejsze jednostki napędowe, musiałem się przesiąść na coś innego. Szczęśliwie EMax produkuje silniki RSII 2306 2400KV. Można śmiało powiedzieć, że to po prostu następcy owych 2205. Korzystając z promocji na Gearbest za ten model zapłaciłem nieco ponad 50 zł od sztuki. Uważam, że za cenę RacerStarów, czy DYS Samguk, dostałem dużo lepsze silniki, więc wybór był prosty. Czy kupiłbym T-Motory? Pewnie tak, ale kopterowy budżet zakładał średnią, a nie wysoką półkę, więc jest jak jest. Swoją drogą Banggood też je posiada w ofercie, ale 80 zł jest dość zaporowe.

Kamera FPV
Jeżeli szukać kompromisów to na pewno nie tutaj. Tania kamera z wąskim kątem widzenia to proszenie się o problemy i najgorsze spowolnienie nauki latania FPV. Obraz ma być klarowny, nasycony, a przeszkody widoczne niezależnie od tego, czy latasz pod słońce, czy w cieniu, rano, czy wieczorem. Z tego powodu należy kupować kamery z WDR (Wide-Dynamic Range), które dzięki szerokiej rozpiętości tonalnej mogą być nieco mniej kontrastowe, ale w zamian niezależnie od warunków wyświetlają obraz, na którym można polegać i nie ma tu mowy, że nie zobaczymy jakiejś gałęzi tylko dlatego, że kamera skierowana jest pod słońce. Ja wybrałem Foxeer Falkor Mini, ale równie dobrze mógłby to być Runcam Phoenix, Racer 2, czy Swift 3. Szukając nieco tańszej kamery rozejrzałbym się po Caddxach np. Ratel. Oczywiście ile osób tyle opinii, dlatego zalecam swobodę w wyborze. Rzecz w tym, że czasy kamer HS1177 już minęły i nawet robiąc oszczędności, raczej bym ich unikał. To już lepiej pójść np. w Runcam Robin, czy Micro Swift 2, jeśli faktycznie ma być taniej. We freestyle lubię jak najwięcej widzieć naokoło, dlatego wybieram możliwie szerokie kąty widzenia soczewki. Jeśli macie do wyboru 1.8mm i 2.1mm, ja polecam, szczególnie na początku 1.8mm. Obraz może być nieco bardziej zniekształcony, ale to ile widać dookoła jest nieocenione.

Nadajnik FPV
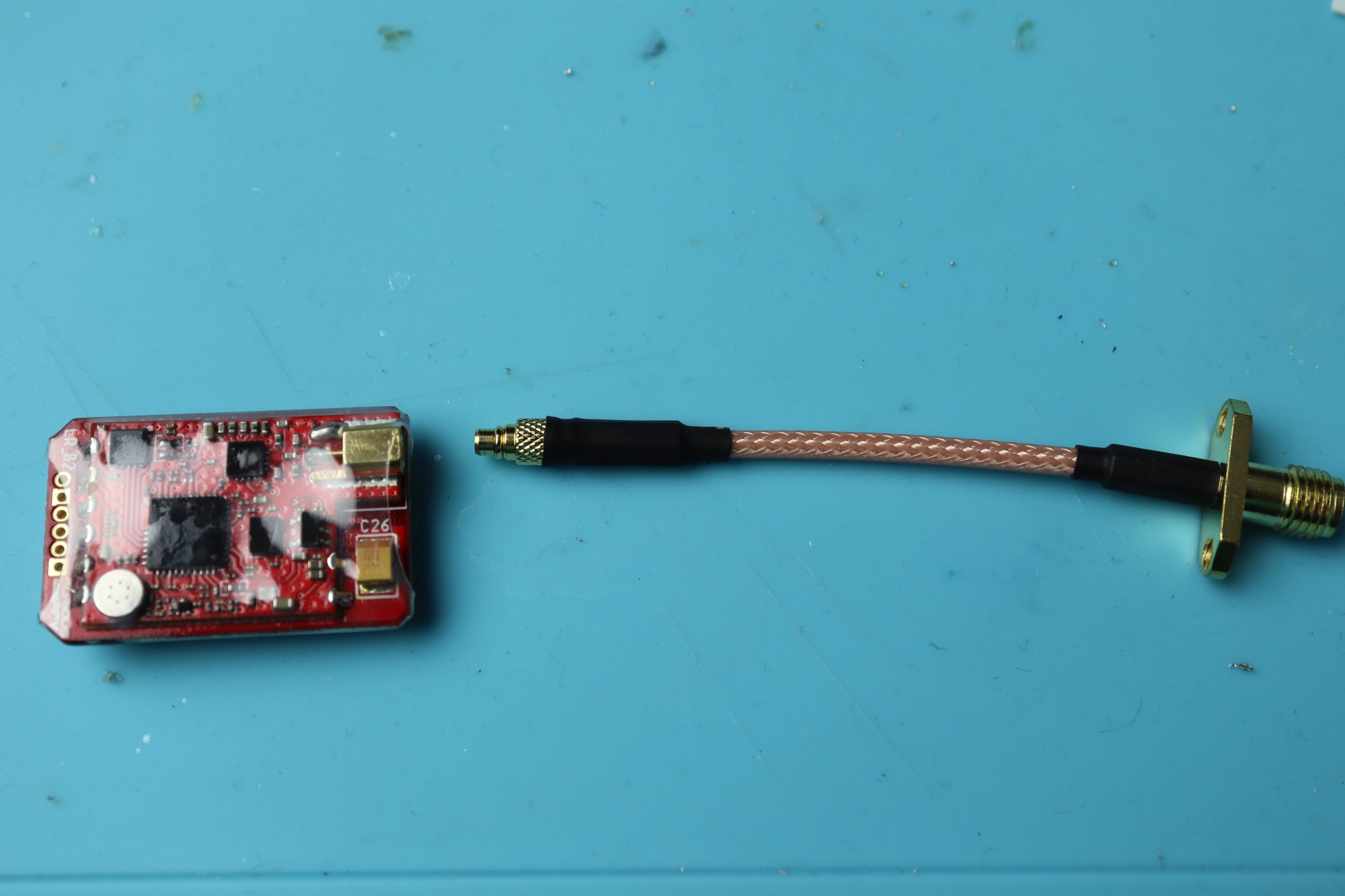
Odkąd zacząłem używać TBS Unify, nie wróciłem do niczego innego. Zdaję sobie sprawę, że rynek szturmują też inne marki np. AKK, które podobno całkiem spolegliwie wypromieniowują sygnał o mocy takiej, jak podano na pudełku. Tym niemniej zacząłem unikać Eachine, nawet mimo sporej różnicy w cenie. W tym kopterze wyjątkowo zamontowałem Furious FPV Stealth, który kupiłem z dobry rok temu, ponieważ jako trzeci poza TBSem Unify i Immersion RC Tramp został dopuszczony oficjalnie do wyścigów, co oznacza, że spełnia odpowiednie wymagania odnośnie przełączania kanałów, PitMode i wszystkiego, co mogłoby negatywnie wpłynąć na obraz pozostałych zawodników. Furious FPV podobnie jak TBS stosuje zabezpieczenie termiczne, więc grzejący się nadajnik może zmniejszyć moc, ale w zamian nie popali nam się bez powodu w locie. TBS określa też normę, jak długo dany nadajnik może pracować bez anteny - 5 godzin na pełnej mocy: http://team-blacksheep.freshdesk.com/support/solutions/articles/4000095446-i-left-my-antenna-unconnected-what-have-i-damaged-.
Gdyby nie zdarzyło mi się latać z wypiętą anteną, albo urwanym pigtail, pewnie nie zwracałbym uwagi, ale niezawodność nadajnika FPV ma znaczenie, ponieważ wraz z kamerą są jedynym gwarantem, że kopterem będziemy w stanie wrócić. Brak obrazu w zasadzie równa się rozbiciu koptera, chyba, że to chwilowa utrata wizji związana z lotem za przeszkodą. TBS ustandaryzował też SmartAudio. Jeżeli je podłączymy do dowolnego kontrolera lotu - będzie działać. W przypadku Eachine może, ale nie musi, co było omawiane na grupach dyskusyjnych. Wreszcie może byłbym zwolennikiem latania na Trampie od Immersion RC, ale swego czasu dopadały go problemy z przegrzewaniem i nagłą zmianą kanałów tym spowodowaną. Gdybym na żywo nie widział, jak to wygląda, uznałbym, że to wyjątek, ale takich sygnałów jest więcej, więc niestety może niesłusznie, ale nie mam zaufania do tego akurat urządzenia. Dotychczas żaden Unify Pro, czy to w wersji Nano, Race, czy Pro, nigdy mnie nie zawiódł, a im dłużej latam, tym bardziej widzę, że bardziej niż szczytowe parametry - interesuje mnie niezawodność. Kopter ma być gotowy do lotu, a pierwszy upadek ma nie pozbawić go tej zdolności, więc nawet jeśli to oznacza dopłatę - w przypadku nadajnika FPV nie mam przed tym oporów.
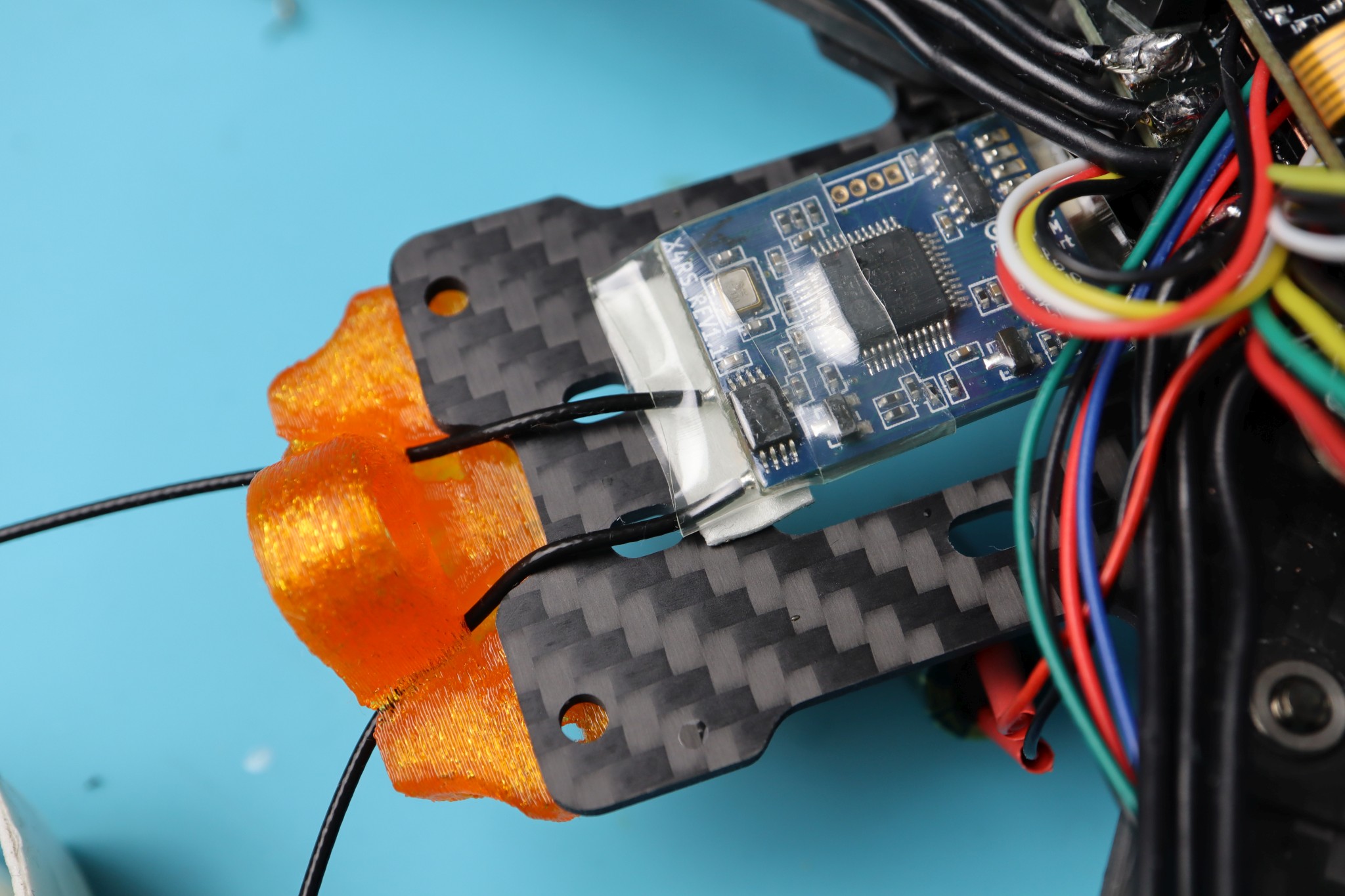
Odbiornik
Z uwagi na to, że steruję za pomocą aparatur od FrSky - Taranis X9D i X-Lite, stawiam albo na rozwiązanie od TBS - CrossFire, albo też bezpośrednio FrSky. W tym drugim wypadku, gdy mówimy o łączności na częstotliwości 2.4GHz preferuję 2 opcje. Albo XM+, jeśli nie potrzebuję telemetrii (i np. zmiany PIDów, czy filtrów poprzez skrypty LUA), albo też XSR. Ten ostatni jest już nieco leciwy, ale jego młodszy brat R-XSR sprawiał nieco problemów z zasięgiem i co bardziej zatwardziali piloci jednak wciąż stawiają na XSR. Nie jest on specjalnie mały, więc w 3" kopterze wykorzystałem jednak R-XSR, ale też nie potrzebowałem latać nim zbyt daleko, z uwagi na gabaryty i możliwości utraty go gdzieś w trawie. Najmniejsze koptery staram się łączyć z XM+, który ma 2 anteny i obsługuje tzw. pełny zasięg (full-range), jak podaje FrSky, co przy optymalnie ustawionych antenach powinno zapewnić nawet do 2 km zasięgu. Nie zaliczam się do tych, którzy uznają to za niezbędne, ale akurat sterowanie jest WAŻNE, a jego utrata bardzo komplikuje dalszy lot ;) Wracając do tematu, XSR jest większy i posiada telemetrię. Z uwagi na to, że kontrolery lotu Kiss nie mają OSD i nie można tak, jak w BetaFlight zmieniać konfiguracji koptera poprzez menu nałożone na obraz z kamery, odbiornik z telemetrią montuję zawsze, gdy łącze je w parze z tym FC. Kakute F4 V2 obsługuje S.Port z inwersją, a więc daje się podłączyć telemetrię do kontrolera lotu, więc zanim zmienię odbiornik na CrossFire, pozostałem przy XSR.
Śmigła
Bardzo zadowolony jestem z przesiadki na HQProp V1S. Jeśli chodzi o Freestyle testowałem parę rodzajów i te odpowiadają mi pod kątem wytrzymałości i stabilności lotu. Na pakietach 4S celuję w modele 5043 (5 cali średnicy, skok 4.3 cala) lub 5045 (5 cali średnicy, skok 4.5 cala) i do tej pory dobrze się to sprawdza. Śmigła są lekkie i wytrzymałe - wyginają się i szczerbią, ale rzadko pękają, co jest zasadnicze w przypadku koptera do freestyle.

GPS
Nowością w przypadku składania przeze mnie koptera jest zastosowanie GPSu. Te stały się bardzo przystępne cenowo, a Betaflight dobrze je już obsługuje. Podstawowym zastosowaniem jest określenie odległości, w jakiej znajdujemy się od miejsca startu, jak również kierunek, w którym w razie czego powinniśmy wracać. Szczególnie, gdy polecimy nieco wyżej i dalej - łatwo zwątpić, w którym właściwie miejscu stoimy - świat z góry wygląda naprawdę inaczej! Wybrałem polecany BN-220, który jest mały i zapewnia podstawowe funkcje.
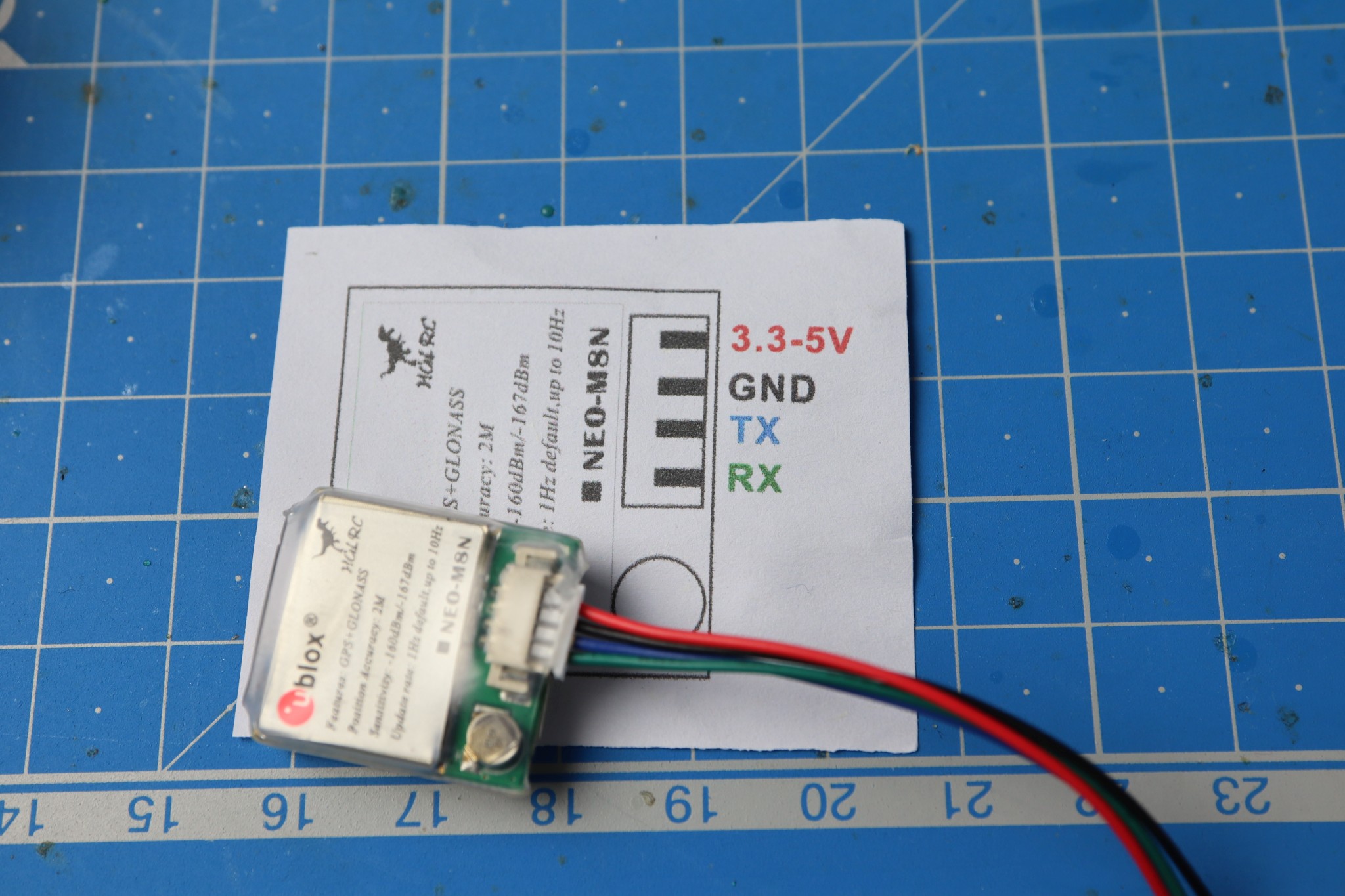
Dodatkowo w Betaflight jest też tryb GPS Rescue Mode, który możemy włączyć w przypadku, gdy zwątpimy, jak właściwie wrócić. Betaflight celowo nie korzysta z magnetometru, aby ocenić stronę, w jaką zwrócony jest kopter. W zamian bazuje na zmianie pozycji, która pozwala określić, czy leci w dobrą stronę, czy też nie. Tryb ratunkowy działa w ten sposób, że wpierw kopter wzbija się na skonfigurowaną wysokość, a następnie powoli kieruje się w naszą stronę. Posadzić musimy go sami, ponieważ autolądowanie jako takie nie jest wspierane i kopter po prostu będzie powoli opadał ku ziemi. Ideą jest jednak to, aby sprzęt sam skierował się w naszą stronę i podleciał na tyle blisko, abyśmy mieli z powrotem obraz z kamery FPV (w razie jego utraty) oraz pełnię kontroli.
Do pracy!
W kolejnych częściach będę opisywał proces składania opisywanego koptera, zwracając uwagę na to, jakie problemy napotkałem i w jaki sposób sobie z nimi poradzić. W odróżnieniu od wcześniejszych artykułów DIY, ten kopter składałem na częściach i wykorzystując współczesne metody i pomysły zaczerpnięte od innych pilotów.
{kind=link}