Hubsan osiągnął duży sukces wypuszczając model X4 w różnych odmianach (H107L, H107C itd.). Doskonałe parametry lotu i przystępna cena sprawiły, że każdy, kto wszedł w to hobby, posiada przynajmniej jeden z tych modeli. Korzystając z postępującej miniaturyzacji firma wypuściła także nanoquadrocopter - Hubsan Q4. Pod taką nazwą znamy go w Europie. W Ameryce sprzedawany jest jako Estes Proto X. Czy jest równie udany, jak jego większy brat ? Przekonajmy się !
W pudełku
Hubsan Q4 przychodzi do nas w dość małym pudełku, które sprytnie mieści wszystko co powinno... i nic więcej. Znajdziemy więc quadrocopter, aparaturę, ładowarkę USB i 4 zapasowe śmigła. W zależności od tego, na którą wersję trafimy, dostaniemy wszystko w plastikowym, bądź kartonowym opakowaniu. Ja swoje niestety wyrzuciłem, więc się nim nie pochwalę - moje przeoczenie.

Śmigła mają taką samą średnicę jak w Cheersonie, ale dłuższą piastę, dostosowaną do ośki silnika. Ładowarka, tak jak zawsze, ma złącze USB po jednej stronie i cała wbudowana jest we wtyczkę. Ma ona także w środku czerwoną diodę, która świeci podczas ładowania i gaśnie, gdy się ono zakończy. Na drugim końcu ładowarki znajdziemy dość nietypowe gniazdo, które omówię w dalszej części recenzji.
Budowa modelu
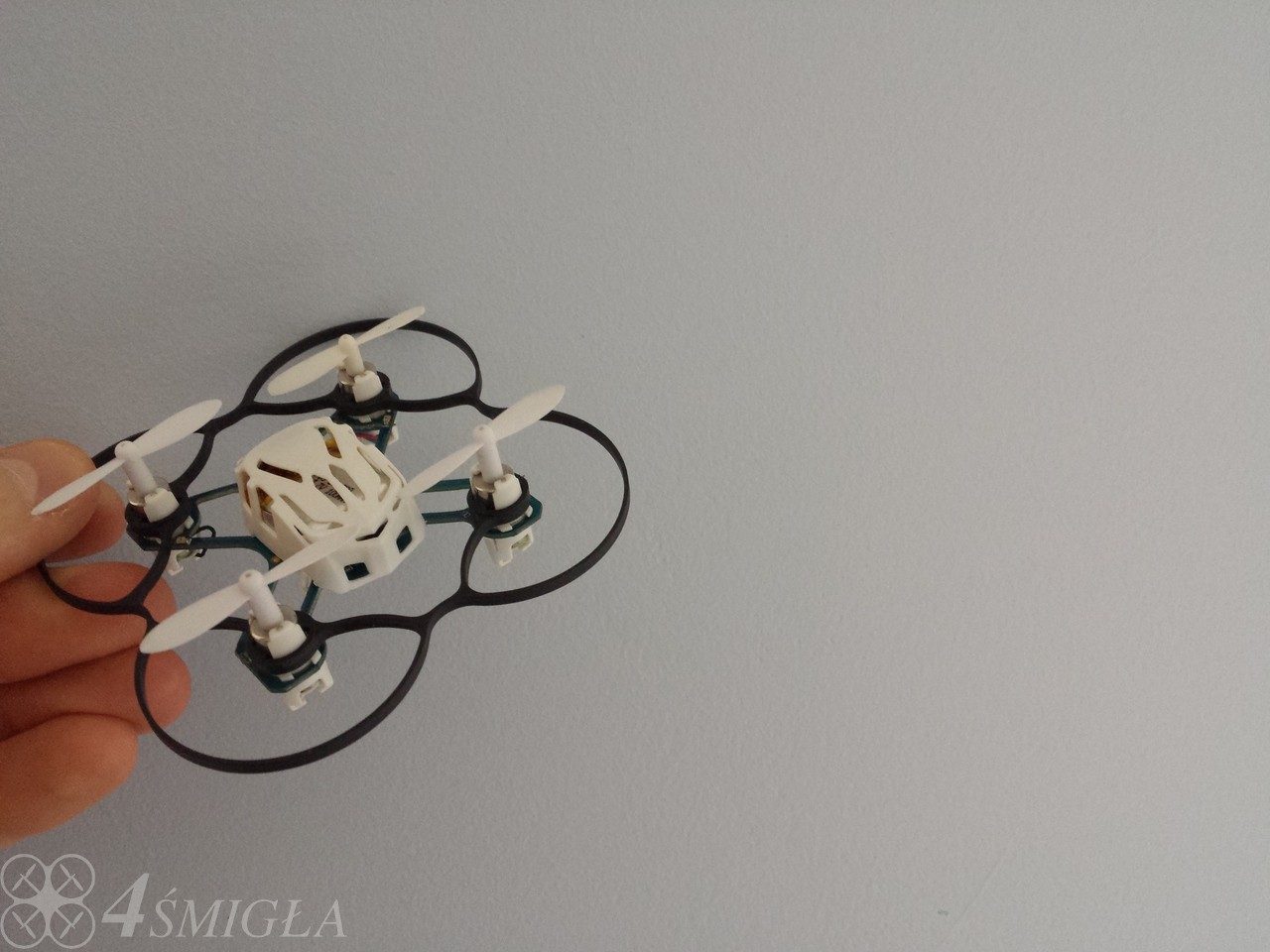
Nanoquadrocopter nie zaskoczy nas swoimi rozmiarami, jeżeli widzieliśmy wcześniej Cheersona CX-10. Ten ostatni jest nieco mniejszy, ale Hubsan wciąż robi wrażenie bardzo lekkiego. Całość ramy stanowi dwustronna płytka laminatowa, który ma wpuszczone w środek ścieżki, podczas gdy wszystkie jej elementy jak zawsze są w technologii SMD (montaż powierzchniowy). Warto zauważyć, że ramiona są także częścią PCB (ang. Printed Circuit Board - płytka drukowana) i tylko dzięki niewielkiej masie modelu wytrzymują jego rozbijanie. Ich wygięcie lub złamanie najpewniej przerwie ścieżki doprowadzające prąd do silników, więc lepiej obchodzić się z nim w miarę ostrożnie. Na szczęście jednak typowe upadki nie doprowadzają do poważnych uszkodzeń, więc można w miarę bezpiecznie uczyć się na nim latać.

Jedyne plastikowe elementy zastosowane w Hubsanie Q4 to kabina, która kryje baterię, oraz mocowania silników składające się z dwóch części. Sama kabina jest odpowiednio powycinana, z zachowaniem sztywności, a jednocześnie nadając agresywny charakter i zmniejszając całkowitą masę. Otwory z przodu stanowią "oczy" modelu, które świecą, gdy jest on włączony. Tutaj wyraźnie kontynuowana jest linia Hubsana, który także tym się charakteryzował.

Silniki osadzone są w plastikowych, dwuczęściowych obejmach, które są dość luźno zamocowane w ramie. Nie budzi to zaufania w kwestii stabilności lotu i wytrzymałości, ale jest to tylko wrażenie, ponieważ model dobrze radzi sobie w powietrzu.

Mocowania można obracać wewnątrz otworów w ramie, co może doprowadzić do urwania przewodów, które idą od silnika do punktów lutowniczych na końcach ramion. Na szczęście łatwo to naprawić (przy pomocy lutownicy), ale niestety równie prosto uszkodzić.
Z racji tego, że quadrocopter ma niewyjmowalną baterię, pod spodem umieszczono także włącznik. Należy pamiętać, aby przed ładowaniem wyłączać model, bo może być to nieciekawe w skutkach.

Model posiada wszystkie śmigła w tym samym kolorze - białe. Mają one długie piasty i powiedzmy sobie szczerze - nie trzymają się na ośkach silników zbyt dobrze. Z jednej strony jest to bardzo uciążliwe, bo duża część upadków kończy się szukaniem śmigieł po całym pokoju, ale z drugiej powoduje to wytracanie energii uderzenia i tym samym zmniejsza jego wpływ na samą laminatową ramę. Innymi słowy - trudniej jest uszkodzić mocowania silników lub połamać ramiona. Śmigła też częściej spadają, niż pękają, co niewątpliwie jest atutem. Ich trwałość oceniam podobnie jak tych z Cheersona CX-10, czyli wysoko.
Na zdjęciach można także zobaczyć dodatkową osłonę na śmigła, którą dokupiłem. W niewielkim stopniu zwiększa ona wagę modelu, ale w zamian chroni całość wyłącznie z boku. Na pewno jednak dodaje mu nieco sztywności, co może uchronić cienkie ramiona od wygięcia. Ja zamocowałem osłonę na swoim modelu, ale nie twierdzę, że jest ona niezbędna.

Z racji tego, że wszystkie śmigła są tego samego koloru, orientację łapiemy poprzez kolorowe diody na końcach ramion. Niebieskie z przodu i czerwone z tyłu. Dodatkowo dwoje niebieskich "oczu" pod obudową, czyli kolejne 2 diody. Te ostatnie migają, gdy trwa kalibracja - podobnie jak w "dużym" Hubsanie X4.

Oświetlenie jest dobrze widoczne z każdej strony, więc niezależnie od pozycji modelu, nie stracimy orientacji. Dodatkowo diody są wyjątkowo jasne, więc quadrocopter jest naprawdę łatwy do pilotowania w ciemności. Zastosowanie oświetlenia w kolorze czerwonym z tyłu jest bardzo intuicyjne, bo stanowi analogię do samochodu.

Gdy bateria się rozładowuje, quadrocopter informuje o tym migając wszystkimi 4 diodami na ramionach. Mamy wtedy paręnaście sekund na posadzenie go na ziemi. Nie dochodzi jednak do odcięcia mocy, co pozwala na kontrolowane lądowanie w dogodnym punkcie. W tym czasie zostają wyłączone flipy i nie można ich wykonywać ze względu na ryzyko nagłej utraty zasilania.

Z tyłu modelu znajduje się języczek z dwiema ścieżkami, do którego podłączamy ładowarkę. Sprytnie umieszczony od spodu opornik i dopasowany do niego kształt wtyczki zabezpieczają przed podłączeniem jej odwrotnie. Z drugiej strony preferowałbym gniazdo, ponieważ jedynym punktem, który trzyma wtyczkę od ładowarki na miejscu, są dwie blaszki, które naciskają na ścieżki. Ten styk zapewnia ładowanie i jednocześnie mechanicznie nie pozwala na wzajemne ich rozłączenie. Nie jest to jednak chwyt pewny i gniazdo takie, jak w Cheersonie CX-10 sprawdziłoby się lepiej, bo końcówka ładowarki lubi się wysuwać, gdy tylko poruszymy modelem.

Budowa wewnętrzna
W przypadku Hubsana Q4 trudno mówić o jakimkolwiek rozkładaniu. W zasadzie wszystko, co być może, jest od razu na wierzchu. Jedyny demontowalny element - kabina zaczepiona jest w 4 punktach o ramę modelu i można ją łatwo zdemontować.
Pod nią kryje się bateria, która ma pojemność 100 mAh i jest zakończone mikrowtyczką. Pozytywną informacją jest fakt, że na płytce zmieściło się dla niej gniazdo. Oznacza to, że łatwo jest wymienić baterię bez konieczności używania lutownicy. Jest ona przyklejona do wierzchu płytki taśmą dwustronną, aby nie przesuwała się podczas lotu. W tak małym modelu nawet delikatne przesunięcie środka ciężkości (ang. CG - Center of Gravity) będzie prowadziło do znoszenia quadrocoptera w którymś z kierunków. Jeżeli kalibracja nie pomaga, to warto zwrócić na ten element uwagę, choć taśma jest na tyle mocna, że nie powinno to stanowić problemu do czasu wymiany ogniwa.

Dociekliwi zauważą, że antena jest wewnętrzna, wpuszczona bezpośrednio w PCB. Widoczna jest na zdjęciu poniżej w postaci "wężyka" na samym przodzie quadrocoptera.

Aparatura
Jeżeli ktoś czytał opis aparatury od CX-10, to ta od Hubsana Q4 wygląda identycznie. Różnice zaczynają się w obsłudze.

Bindowanie, czyli łączenie aparatury z quadrocopterem odbywa się, podobnie jak w Hubsanie X4, bez konieczności ruszania drążka gazu, choć musi być on ustawiony na 0, żeby model przypadkiem nam nie wystartował.
Aparatura po włączeniu miga diodą pośrodku na czerwono. Po ustanowieniu połączenia zmienia ona kolor na zielony i świeci stale.

Drążki pracują miękko - nie stawiają za dużego oporu, ale też dobrze wracają do centralnej pozycji. Każdy z nich można też wcisnąć, co daje nam dodatkowe funkcje.
W przypadku lewego jest to włączenie lub wyłączenie flipów (przewrotów). Zmiana sygnalizowana jest piknięciem aparatury - podwójne oznacza, że beczki mogą być wykonywane, pojedyncze - zostały wyłączone.
Inaczej, niż zwykle, a tak samo jak w innych Hubsanach, wykonywanie pętli w powietrzu uzyskujemy poprzez pchnięcie prawego drążka gwałtownie między dwiema skrajnymi pozycjami. Zależnie od manewru jest to ruch (lewo-prawo) - beczka w prawo, (prawo-lewo) - beczka w prawo, (przód-tył) - przewrót w tył i wreszcie (tył-przód) - przewrót w przód. Przy pomocy aparatury od Q4 ewolucje wykonuje się łatwiej, niż miało to miejsce w przypadku X4, czyli jego większego brata. Krótsze drążki ułatwiają szybkie osiągnięcie skrajnych pozycji, więc wykonywanie flipów jest szybsze i łatwiejsze. To oczywiście nie oznacza, że opisywane rozwiązanie jest wygodne. Dużo łatwiej wykonywać ten manewr po naciśnięciu przycisku na aparaturze, ale jak już wspominałem w recenzji Hubsana X4, ten akurat producent trzyma się własnego rozwiązania.

Naciśnięcie prawego drążka zmienia tryb lotu. W sumie mamy 3, z czego pierwszy jest najwolniejszy, a ostatni pozwala Hubsanowi latać na pełni jego możliwości. Zmiana trybów jest poprzedzona sygnalizacją przy użyciu środkowej diody aparatury, jak również akustycznie. Jedno piknięcie odpowiada pierwszemu trybowi, w którym to dioda będzie się stale palić na zielono. W drugim zacznie ona migać i usłyszymy dwa piknięcia. Trzeci, najszybszy poprzedzony jest trzema piknięciami, a dioda stanie się pomarańczowa. Dzięki takiemu rozwiązaniu wiemy dobrze, w którym aktualnie trybie jesteśmy.

Aparaturę zasilają dwie baterie AAA. Klapka z tyłu ma na zatrzasku otwór na śrubkę, która może ją skutecznie zablokować, ale na szczęście producent nie zdecydował się jej zastosować. Dzięki temu wymiana baterii jest szybka, a zatrzask i tak trzyma wystarczająco skutecznie.
Jeżeli chodzi o zasięg aparatury, to wydał mi się on nieco słabszy niż w przypadku Cheersona CX-10. Latając w odległości takiej, żeby model dało się widzieć i wiedzieć, jak jest zorientowany czasem zdarzało mi się utracić sygnał. Nie jest to częste, a rzetelna ocena jest o tyle trudna, że warunki propagacji sygnału 2.4 GHz w różnych miejscach naprawdę silnie się różnią. Jeżeli chcemy polecieć Q4 dalej, niż go widzimy to oczywiście można skorzystać z aparatury od X4 na której to tego typu odległość nie zrobi wrażenia.
Charakterystyka lotu

Hubsan Q4 zaskakuje zarówno swoją dynamiką, jak i dobrze dobranymi ustawieniami w każdym z trybów. W pierwszym zachowuje się on odpowiedno ospale, aby umożliwić początkującym opanowanie lotu. Wychylenie w każdym z kierunków jest niewielkie, a Yaw rate, czyli tempo obrotu wokół własnej osi odpowiedno niskie, ale pasujące do reszty sterowania.
W trybie drugim model nieco przyspiesza, więc jest on dobry do latania w domu, gdy już dobrze poznamy się na kontroli quadrocoptera. Jest to widoczna zmiana w stosunku do pierwszego i sprawdzi się ona także na dworze. Yaw rate także dopasowuje się do zwiększonej czułości drążków i ponownie jest dobrze zbalansowany w stosunku do dynamiki ruchu w pozostałych kierunkach.
Tryb trzeci, najszybszy, w zasadzie jest przeznaczony do zabaw na zewnątrz, chyba że mieszkamy na naprawdę sporym metrażu. Quadrocopter wykorzystuje całą dostępną moc, a w zestawieniu z niewielką masą uzyskujemy naprawdę szybki lot. Moim zdaniem jest on jeszcze dynamiczniejszy niż CX-10, a już na pewno przewyższa go jeżeli chodzi o Yaw rate. Ten ostatni ponownie się zmienia i w ostatnim trybie model naprawdę szybko kręci "bączki". Na szczęście nie czyni tego zbyt gwałtownie, bo takie modele również można spotkać. Trzeba być delikatnym jeżeli chodzi o sterowanie lewym drążkiem, ale model daje się w miarę przewidywalnie kontrolować. W trybie trzecim latanie w domu staje się już mocno ryzykowne, bo quadrocopter bardzo chętnie się rozpędza, ale błąd w pilotażu może być już fatalny w skutkach.
Hubsan Q4 nie reaguje na wiatr mocniej niż CX-10. Lekki powiew nie powinien na nim robić większego wrażenia, więc możliwe jest zabranie go na dwór i tam testowanie trzeciego trybu lotu.

Flipy wykonywane są szybko, choć z większą utratą wysokości, niż w przypadku CX-10. Wiąże się to głównie ze specyfiką ich aktywowania po stronie aparatury, bo zanim model "załapie", że nie zmieniamy gwałtownie kierunku lotu, tylko chcemy wykonać przewrót, posłusznie reaguje na wcześniejsze komendy.
Stabilność quadrocoptera jest dobra, choć w moim odczuciu bardziej "zbite" i cięższe modele mają tutaj nieco łatwiej. Mam wrażenie, że luźno zamocowane silniki i bateria przyklejona na taśmę dwustronną nie dają pełnej stabilności środka ciężkości i można zaobserwować lekkie "noszenie" modelu. Można go przyzwoicie wytrymować, ale nie ma co liczyć, że będzie przez długi czas wisiał w jednym miejscu. Przy odrobinie doświadczenia w pilotażu można jednak zniwelować problem.
Podsumowanie
Hubsan Q4 to ciekawa odmiana od większych quadrocopterów, a przy tym nie czyni zawodu swoimi możliwościami. Trzy tryby pozwalają praktycznie każdemu na znalezienie właściwej dla siebie charakterystyki lotu. Małe rozmiary z kolei powodują, że łatwo i chętnie można go ze sobą zabrać na krótki spacer, bądź polatać w biurze, czy w domu. Szybkość lotu i świetnie wyregulowane parametry sterowania dla każdego z kanałów sprawiają, że modelem lata się bardzo przyjemnie. Doskonałe oświetlenie pozwoli nam na zabawę także po zmroku i to bez większych trudności. Aparatura sprawdza się nadzwyczaj dobrze i jest wygodna w użyciu, mimo swoich skromnych rozmiarów. Plusem jest też możliwość bindowania z większą aparaturą od Hubsana X4.
Q4 jest natomiast bardziej kruchy niż modele, które mają pełną obudowę, jak np. CX-10, czy nawet Hubsan X4. Delikatne ramiona nie przetrzymają dużego nacisku, choć upadki nie zdają się robić na nim wrażenia. Śmigła, które spadają po każdej prawie kolizji będą natomiast utrapieniem, szczególnie jeśli weźmiemy model w plener. Wreszcie luźne mocowania silników, które nie budzą zaufania i powodują, że można łatwo urwać od nich przewody. Wszystko to niestety koszty niskiej wagi modelu. No i na koniec nieszczęsne flipy, które trzeba wykonywać machając drążkami, zamiast mieć do tego specjalny przycisk. Te mankamenty, nie powinny jednak przyćmić fenomenalnych parametrów lotu tego quadrcoptera.
Hubsan Q4 jest dwa razy droższy niż Cheerson CX-10, ale stara się potwierdzić swoją jakość i tym samym uzasadnić cenę. Jeżeli ktoś posiada już nanoquadrocopter w swojej kolekcji to zaskoczenia raczej nie będzie. Jeśli natomiast nie latał tak małym modelem, to Hubsan na pewno go nie rozczaruje. Jeśli dynamika lotu CX-10 była dla Was za mała, to przesiadka na Q4 również powinna być satysfakcjonująca.
Ocena 4Śmigła.pl: 4.5 / 5 ![]()
![]()
![]()
![]()
![]()
Olx.pl: ok. 140 zł (z przesyłką)
Allegro.pl: 136 - 150 zł (z przesyłką)
Banggood: 105 zł (Hubsan Q4 - Banggood [preorder])
Warto wiedzieć
Hubsan Q4 pozwala na kalibrację akcelerometru. Wykonujemy to dokładnie tak samo, jak w przypadku jego większego brata. Lewy drążek kierujemy w prawy-dolny róg, natomiast prawym wykonujemy gwałtowne ruchy lewo-prawo. Kalibracja zostanie zasygnalizowana poprzez mignięcie 2 niebieskimi diodami mieszczącymi się z przodu pod obudową (nie na ramionach !).
Protokół używany przez Hubsana Q4 jest taki sam jak w X4. Można więc stosować ich aparatury zamiennie.
{kind=link}