Po miniaturyzacji wielowirnikowców z silnikami szczotkowymi, których apogeum był, sprzedawany pod przeróżnymi nazwami DHD D1, następne w kolejce musiały być modele bezszczotkowe. W ostatnim półroczu doszło do gwałtownego przyspieszenia w tej kwestii i ESC wraz z silnikami i kontrolerem lotu mieszczą się na ramach mniejszych niż 100mm. Każdy próbuje uszczknąć kawałek tego rynku dla Siebie i jeśli śledzicie oferty na Banggood to zapewne słyszeliście o Eachine Aurora 90, który jest kopią oryginalnego AXC Halo opartego o ramę z włókna węglowego i aluminium. Tym razem w moje ręce trafił Aurora 100, który jest tylko odrobinę większy od wspomnianych. Miniaturowy model wyścigowy posiada oczywiście kamerę FPV, bezszczotkowy napęd, miniaturową wersję RacerCube, która składa się z ESC 4 w 1, kontrolera lotu F3 oraz odbiornika. Jak przystało na bezszczotkowy model jest to sprzęt, który oscyluje w granicach 500 zł. Co się w nim udało, a czego zabrakło? Zapraszam do lektury!
Model dostarczony do testów przez Banggood - dziękuję!
W pudełku
Model od Eachine przychodzi do nas w kartonowym pudełku, które jest w miarę estetyczne i wymienia podstawowe walory modelu, jak również eksponuje sam wygląd quadrocoptera. Producent uczciwe postawił na mocne strony koptera - kontroler lotu F3 z wgranym BetaFlight, OSD (czyli dodatkowe informacje nakładane na obraz, który wysyła nadajnik FPV), fakt przesyłania wideo na częstotliwości 5.8GHz oraz pasek LED z tyłu. Nic dodać, nic ująć - wszystko zgodne z prawdą.

Z boku kartonu zaznaczony jest typ odbiornika, z którym sprzedawany jest quadrocopter. Są to jak zawsze najpopularniejsze opcje, czyli FrSky, FlySky, oraz DSM2/DSMX. Ja tradycyjnie wybrałem ten pierwszy ze względu na cierpliwe inwestowanie w sprzęt wspierający tenże protokół - w tym popularne aparatury Taranisa.

Wnętrze pudełka wypełniono odpowiednio wyciętą pianką, która zabezpiecza model na czas transportu. Jedynie z wierzchu brakuje dodatkowej warstwy ochronnej, ponieważ na wszystkim leży tylko cienka papierowa instrukcja. Nie zmienia to jednak faktu, że model dotarł do mnie w idealnym stanie i mimo wgnieceń samego kartonu nic w jego wnętrzu nie ucierpiało.
W bocznej kieszonce znajduje się bateria. Dobrze, że na czas transportu została ona oddzielona od samego quadrocoptera, ponieważ w przypadku modeli wyścigowych ogniwo nie jest nigdy montowane wewnątrz kadłuba, gdzie byłoby dobrze zabezpieczone przed uszkodzeniami mechanicznymi.

Dołączona do zestawu bateria to 2S (7.4V) o pojemności 450 mAh oraz deklarowanym, maksymalnym prądzie rozładowania wynoszącym 80C. Z początku kwestionowałem w ogóle tego typu wydajność prądową, ale produkt Lumenier potwierdza, że jest to możliwe. Czy Eachine faktycznie wyposażyło swój quadrocopter w ogniwo, które byłoby w stanie zapewnić 40A na wyjściu? Trudno powiedzieć. Jestem skory twierdzić, że jest to tzw. Burst Rate, czyli chwilowy prąd (do 15 sek.), a ciągły (continuous) jest niższy, ale to tylko moje dywagacje. Dla nas istotne jest to, że model radzi sobie dobrze i nie miałem z nim żadnych przygód, które wiązałyby się z przerwami w zasilaniu. Wygląda na to, że Eachine postanowiło wreszcie dołączać ogniwa lepszej jakości na których można wreszcie porządnie polatać. Pozostaje jeszcze pytanie - jak długo? Czas lotu Aurory 100 nie przekracza 3 minut, więc zapasowe baterie to jeden z zakupów, o którym warto pomyśleć.

W pudełku znajdują się też dwa woreczki z częściami zapasowymi.

Pierwszy z nich zawiera 4 zapasowe śmigła oraz śrubki, którymi przykręca się je do silników. O sposobie montowania śmigieł będę mówił też nieco dalej. Jak widać na zdjęciach, producent przewidział komplet zielonych oraz czerwonych.

Od razu mówię, że nie warto się do nich przywiązywać, ponieważ pękają z niebywałą łatwością. Pierwsze 2 sztuki połamałem przy okazji zahaczenia o krzaki. Kolejne pękły po upadku na kostkę parkingową, co zobaczycie na nagraniu z lotu w dalszej części recenzji.

Drugi z woreczków zawiera dodatkowe akcesoria. Wśród nich znajdziemy klucz imbusowy oraz śrubokręt krzyżowy. Dzięki temu pierwszemu zamocujemy śmigła i rozkręcimy ramę, natomiast drugi posłuży nam przy wymianie silników i regulacji kąta pochylenia kamery. Miło, że producent daje nam tutaj komplet, który możemy wykorzystać przy dalszej eksploatacji.
Prócz tego w zestawie znajdziemy rzepy - jeden z nich możemy przykleić od spodu do ramy, drugi zaś do baterii, aby nie przemieszczała się w trakcie lotu. Do tego dostajemy cieniutki pasek, którym obejmiemy baterię i przymocujemy ją do ramy. Dla tych, którzy będą walczyć o każdy gram wagi producent przygotował dwie gumki recepturki, które możemy wykorzystać zamiast rzepów i paska. Ja wolałem solidniejsze mocowanie baterii, więc wybrałem pierwszy wariant.
W komplecie znajduje się także fragment dwustronnej, samoprzylepnej taśmy, ale nie znalazłem jeszcze dla niej zastosowania.

Nie wypada też zapomnieć o instrukcji, która jest naprawdę porządna. Wydrukowana została na kredowym papierze i to w kolorze! QX80 miał przyzwoitą instrukcję, a tutaj zdecydowano się jeszcze pójść o krok dalej.

Producent założył, że kupujący nie musi wiedzieć, w jaki sposób połączyć quadrocopter w wersji BNF z aparaturą, ale z kolei wymaga od użytkownika umiejętności sterowania oraz podstawowej konfiguracji BetaFlight. W instrukcji pominięto więc elementy związane ze sterowaniem, czy wykonywaniem manewrów, ale np. objaśniono podstawową budowę modelu i podano listę części zapasowych.

Jak już wspomniałem, instrukcja objaśnia też krok po kroku w jaki sposób mamy zbindować quadrocopter z naszą aparaturą. Podano procedury dla wszystkich 3 rodzajów odbiorników, z jakimi możemy kupić Aurorę 100.
Język instrukcji jest zrozumiały dzięki przyzwoitej jakości tłumaczeniu. Z pewnością wykorzystano do tego coś więcej, niż translator, co cieszy. Jeśli nie mieliśmy do tej pory do czynienia z modelem, który trzeba konfigurować przez BetaFlight i kabel USB, dołączona instrukcja z pewnością nam to sporo ułatwi.
Budowa
Eachine Aurora 100 to naprawdę niewielki quadrocopter, więc poziom "upakowania" elementów jest naprawdę spory. Jak dość słusznie zauważył jeden z czytelników - bryła tego quadrocoptera jest dość kanciata i bez specjalnego wyrazu. Na plus z pewnością można zaliczyć fakt, że w zasadzie całą elektronikę udało się schować pomiędzy elementami ramy, które notabene wykonane są z włókna węglowego. Nie należy ono do najgrubszych, ale w modelach tych rozmiarów waga gra ogromną rolę. Zarówno dolna płyta (z ramionami), jak i górna to dokładnie 1.5mm. W zamian sam quadrocopter waży 64 gramy bez baterii. Po dołożeniu ogniwa (32g) dochodzimy do 96 gramów - wciąż poniżej 100. Jak na model z bezszczotkowymi silnikami, ESC 10A, kontrolerem lotu, OSD to naprawdę niezły wynik!

Pierwszym, co zwraca uwagę jest kamera z nadajnikiem FPV. Eachine wykorzystało własne rozwiązanie - AIO FPV 5.8 GHz, 600TVL, 48 kanałów.

Co bardziej wnikliwi czytelnicy zapytają pewnie - jak to 48 kanałów? Przecież pasm jest 5 (40 kanałów), a nie 6! Eachine od niedawna lansuje tzw. L-band, czyli pasma poniżej 5.8GHz. W tym przypadku dodatkowe 8 kanałów mieści się w zakresie 5.3 - 5.6GHz. Jest ono dość kłopotliwe, ponieważ trudno mi ustalić jego stan prawny. Joshua Bardwell, który naprawdę wie o czym mówi, w swoich materiałach wspomina, że jest to pasmo, którego w Stanach nie można legalnie używać, ponieważ pracują na nim stacje meteorologiczne i niektóre radary. Jednocześnie w tym paśmie dopuszczono sieci Wi-Fi 5 GHz, ale z wyraźnymi ograniczeniami dotyczącymi mocy (100-1000mW zależnie od częstotliwości), oraz koniecznością używania DFS (and. Dynamic Frequency Selection), aby urządzenia cywilne zmieniały częstotliwość na inną, gdy wykryją kolizję z kimkolwiek innym. Rzecz w tym, że wg. Wikipedii ograniczenia obejmują moce powyżej 100mW, a częstotliwości jako takich można używać z podziałem na dopuszczone tylko wewnątrz budynków (indoor) i na zewnątrz (outdoor). Nasz kopter co prawda raczej jest outdoor, ale ma niewielką moc nadawczą. W zamian częstotliwość ustawia się na sztywno i trudno przewidzieć, gdzie użytkownik pojawi się ze swoim urządzeniem. Innymi słowy szansa na to, że zakłócimy inne urządzenie jednak występuje, choć jest niewielka. Mówię uczciwie, że nie wiem, jaki jest status prawny na dziś, więc na wszelki wypadek radzę omijać to pasmo. Inna sprawa, że bez odbiornika, który pracuje na tej częstotliwości i tak nic nie zrobimy, ale dopóki nie trafię na jasną wykładnię - nie ryzykowałbym. W naszym kraju i tak amatorów korzystania z 5.8GHz jest jeszcze dość mało, więc na razie szansa wpadnięcia w kolizję na tym paśmie jest relatywnie niewielka.

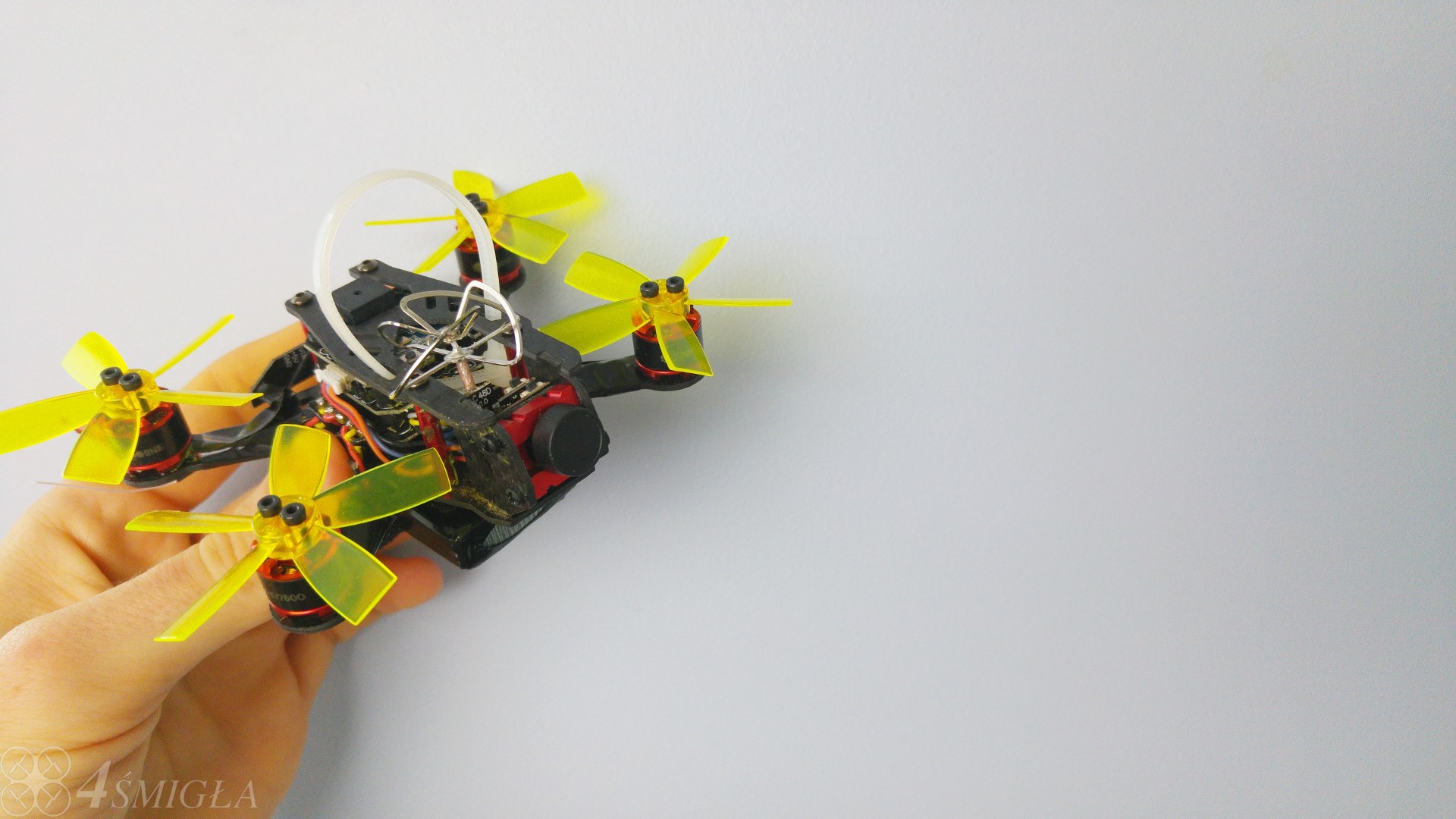
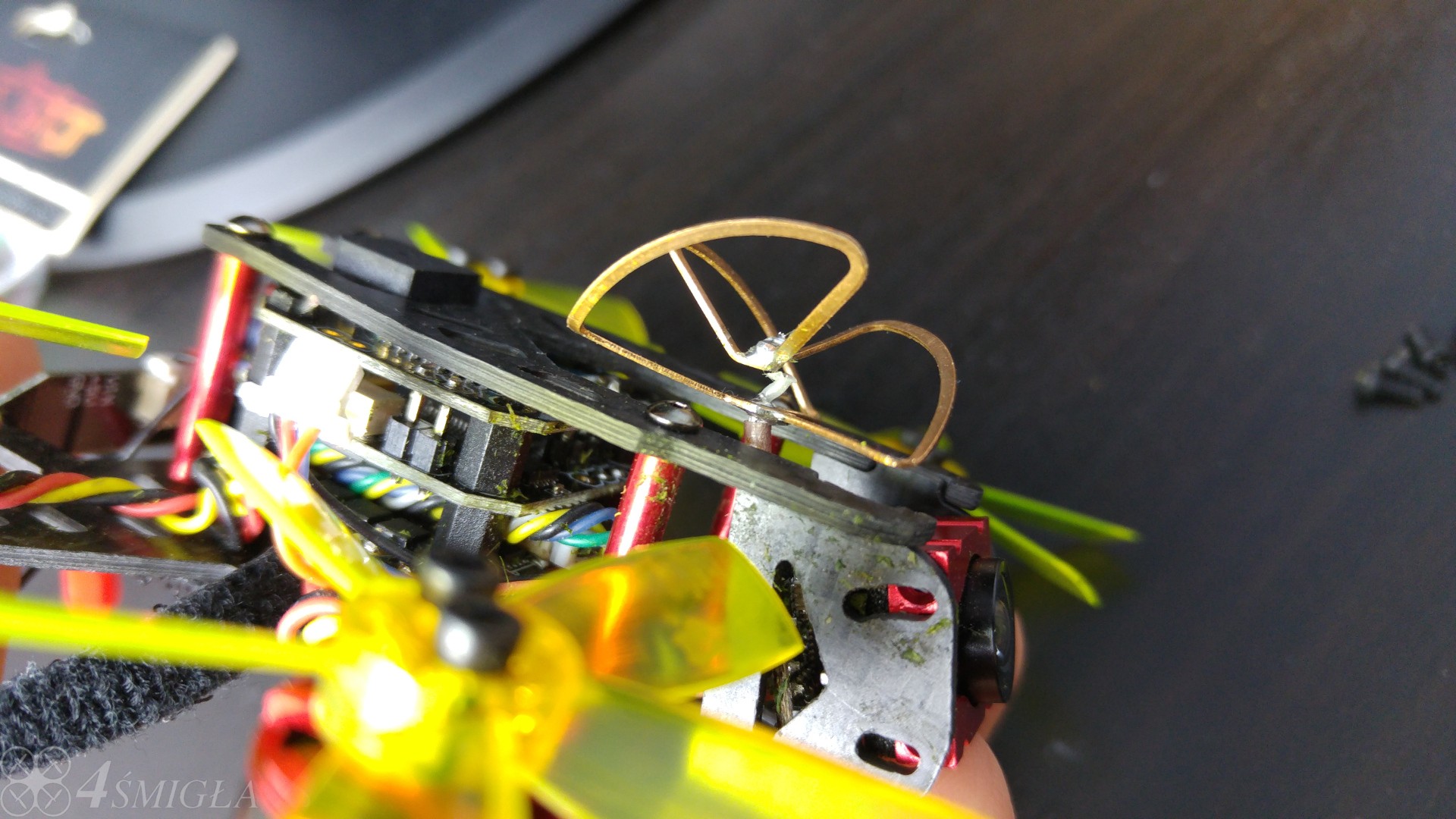
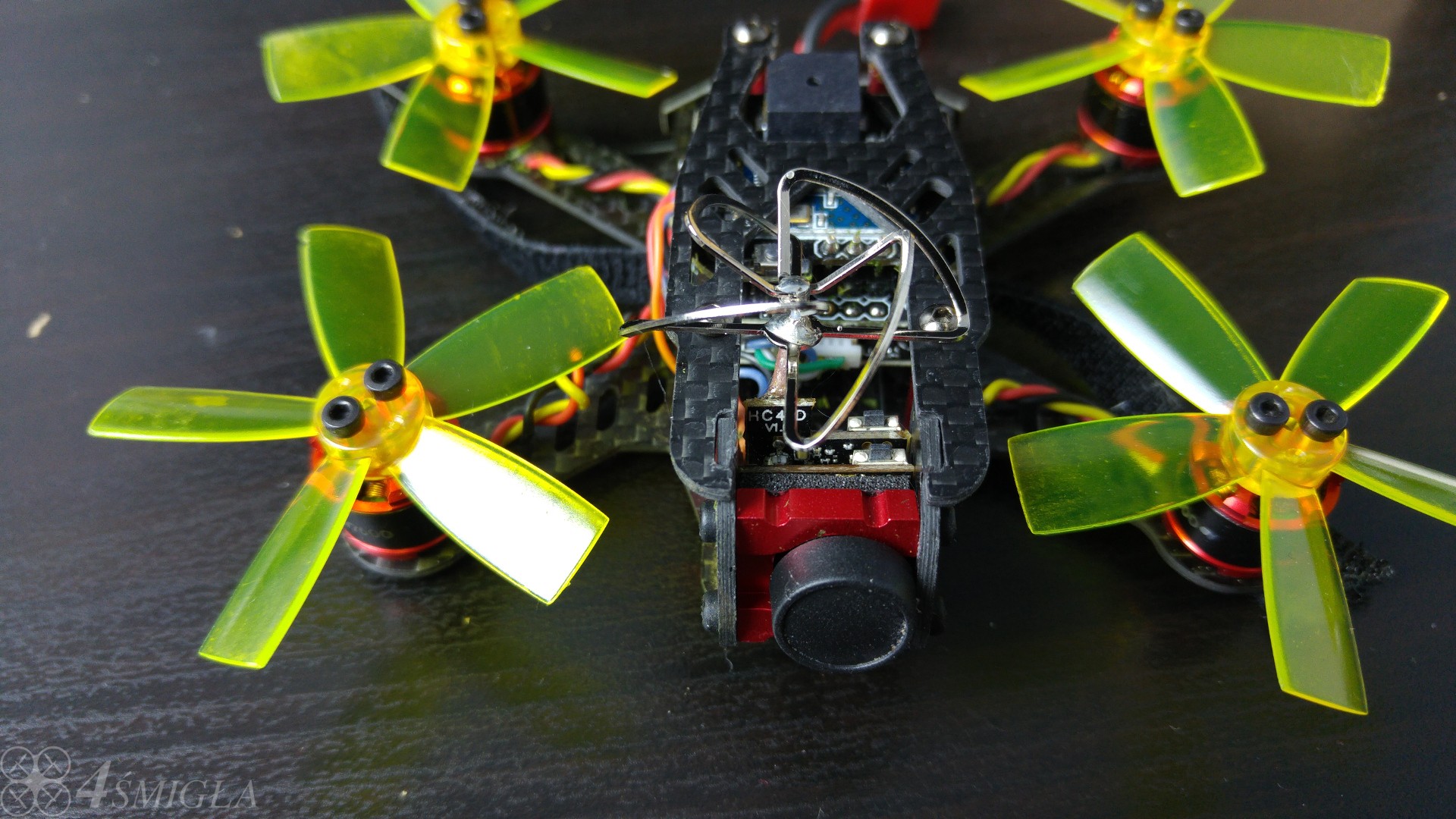
Kamera została umieszczona w aluminiowym mocowaniu, które jest dodatkowo regulowane. Domyślnie jest ona pochylona o 15 stopni, a maksymalnie możemy uzyskać około 30. Kamera pozwala także regulować kąt w drugą stronę, ale nie da się jej ustawić idealnie poziomo - pozostanie około 5 stopni, co przy szerokokątnym obiektywie nie jest specjalnie kłopotliwe. Sama soczewka niewiele wychodzi poza obrys koptera i gdyby nie wystająca, totalnie niezabezpieczona antena u góry - nie byłoby do czego się przyczepić. Eachine ponownie pozwala się wykazać naszej kreatywności i skonstruować osłonę na nią samodzielnie. Jakkolwiek fabryczne rozwiązanie nie zmniejszałoby wagi modelu, uważam, że odkryta i krucha antena będąca najwyższym punktem modelu jest jednak niezbyt przemyślanym rozwiązaniem.

W górnej części kamery z nadajnikiem znajdują się dwa przyciski. Ten bliżej obiektywu służy do obracania obrazu (krótkie przyciśnięcie) oraz zmiany trybu obrazu z PAL na NTSC i z powrotem, kiedy go dłużej przytrzymamy.

Przycisk z tyłu pozwala z kolei zmieniać kanały. Kiedy go przytrzymamy - zmieni pasmo na kolejne. Skakanie odbywa się kolejno po: "A", "Boscam", "E", "Fatshark", "Raceband" oraz "Low-band". Krótkie przyciśnięcie zmieni nam kanał na kolejny, a poruszamy się po kolei od 1 do 8.

W ustaleniu które pasmo i kanał mamy aktualnie wybrane pomagają diody, które znajdują się z tyłu nadajnika. Niebieski rząd odpowiada pasmom w tej kolejności, jak omówiłem powyżej. Notabene jest to układ, którego większość producentów się trzyma - zdziwiłbym się, gdyby było inaczej. Jeśli chodzi o kanały, to również są oznaczone - tym razem zielonymi diodami. Jest ich 8 i każda odpowiada jednemu kanałowi, więc wystarczy policzyć, która od lewej się pali i będziemy wiedzieli, na którym aktualnie się znajdujemy.

Napęd Aurory 100 to miniaturowe silniki bezszczotkowe o rozmiarach 1104 i KV wynoszącym 7500. W zasadzie obie te liczby robią wrażenie, ponieważ silnik naprawdę jest niewielki, a teoretyczna maksymalna prędkość obrotowa oscylująca w granicach 50.000 obrotów (7.500 KV * 7.4V) robi wrażenie nawet na laikach.

Ciąg gwarantują 2-calowe, 4-płatowe śmigła wykonane z ABS. Ich skok to aż 3.5 cala, czyli sporo więcej niż średnica. W rezultacie ich oznaczenie to 2035. Same wrażenia z lotu i siła nośna, którą zapewniają są bardzo pozytywne. Aurora 100 z łatwością robi przewroty i dobrze się rozpędza zachowując przy tym bardzo wysoką stabilność lotu i dużą jego dynamikę. O śmigłach nie powiedziałbym złego słowa, gdyby nie pękały przy pierwszym draśnięciu o przeszkodę. Swego czasu skarżyłem się na Hubsana H107L, w którym co rusz zmieniało się śmigła, ale model od Eachine bije go na głowę. W ciągu pierwszych dwóch testowych lotów udało mi się ułamać płaty w sumie 5 śmigieł, co pozostawiło mnie z 3 sprawnymi. Komplet zapasowych, który dostarczył producent okazał się niewystarczający nawet na moich parę lotów, na podstawie których powstaje recenzja. Koniec końców zmuszony zostałem do zamówienia zapasowych kompletów, żeby kontynuować latanie. Zdecydowanie w tej materii mogło być lepiej.

Śmigła są nakładane na cienką ośkę silnika i zabezpieczane dwiema śrubkami, które przechodzą przez piastę i wchodzą w gwint w wirniku. Żeby je wymienić, należy mieć ze sobą klucz imbusowy, który otrzymaliśmy w zestawie. Śmigła mają oznaczenie kierunku, aby uprościć nam ich właściwe dopasowanie. Te, które obracają się zgodnie z ruchem wskazówek zegara (CW) mają literę "R" - ang. Right, natomiast przeciwnie - literę "L", czyli z ang. "Left".

Silniki mocowane są do ramy przy pomocy 4 śrubek krzyżakowych. Można je odkręcać / dokręcać dołączonym do zestawu śrubokrętem. Nie są one w żaden sposób klejone, ale po lotach żadna z nich nie była luźna, więc raczej nie powinny się odkręcać.
Wycięcia na ramionach mają zmniejszać wagę koptera, ale mogą też niestety wpływać na ich sztywność i wytrzymałość. Na szczęście nie jest to długie, wzdłużne nacięcie, a poprzeczne i nie za duże, więc nie jest to aż tak wielki problem. Ramiona dają się lekko wygiąć, ale kopter nie ma tej przypadłości, którą miał Youbi XV-130. Tam już sama praca silników i śmigieł powodowała ugięcie ramion, co wpływało na stabilność lotu. Tutaj kopter zachowuje się w powietrzu bardzo dobrze.

Aurora 100 waży zaledwie 63.5g. Po przyczepieniu mu baterii jego masa wzrasta do, wciąż całkiem zadowalających, 95g.


Sercem modelu jest Eachine MiniCube, czyli kostka składająca się z 3 połączonych ze sobą płytek. Każda z nich ma rozmiary 2 x 2 cm - dokładnie tyle, żeby zmieścić się w obrysie ramy, ale też zgodnie ze standardem dla małych kontrolerów lotu i ESC. Najwyższą warstwę stanowi odbiornik i buzzer. Ten pierwszy ma przycisk do bindowania wyprowadzony w taki sposób, żeby dało się go przycisnąć bez zdejmowania górnej części ramy. Podobnie buzzer, który wystaje ponad obrys i mieści się w dostosowanym do niego wycięciu.
Górna płytka jest połączona z kontrolerem lotu na sztywno, poprzez 5 pól lutowniczych. Pierwsza para to buzzer, a 3 pozostałe zostały zarezerwowane dla odbiornika. Jeśli zechcemy więc wymienić którąś z nich to niezbędne będzie ich rozlutowanie.

Będąc w temacie brzęczyka, warto jeszcze pochwalić Eachine za zintegrowanie go w kopterze. Nie jest to duży koszt, a bardzo ułatwia znalezienie modelu po nieudanym lądowaniu w krzakach, czy trawie. Jest on wystarczająco głośny, żeby usłyszeć go z parudziesięciu metrów. Z racji tego, że nie latam już modelami bez uprzedniego wlutowania buzzera, bardzo miło, że Eachine mnie (i przyszłych użytkowników) w tym wyręczyło.

W środkowej warstwie mieści się kontroler lotu oparty o procesor F3. Ma on wgrany od razu BetaFlight, który jest skonfigurowany pod kątem naszego quadrocoptera. Kontroler lotu ma ściśle przemyślane wyprowadzenie poszczególnych portów. Z przodu znajduje się w sumie 6 pinów, do których podłącza się odbiornik oraz LEDy. W przypadku FrSky i SBUS są to dokładnie 3 z nich, czyli "+", "-", oraz sygnał (cyfrowy, wszystkie kanały na 1 przewodzie). Druga linia 3-pinowa to zasilanie i sterowanie paskiem LED, który może pokazywać różne informacje o stanie koptera.

Po prawej znajduje się 4-pinowe gniazdo, którym podłączamy kamerę z nadajnikiem. Pierwsze dwa przewody to zasilanie, natomiast dwa kolejne to komunikacja z kontrolerem lotu. Złącza UART są szeregowe i transmisja w obie strony jest realizowana zawsze dwoma osobnymi kablami. Jeden z nich odpowiada za przesyłanie danych od kontrolera lotu do nadajnika FPV, a drugi z powrotem. Jest to niezbędne, aby działało OSD. To ostatnie jest zintegrowane w kontrolerze lotu, a jego konfiguracja dostępna spod BetaFlight.

Po lewej stronie z kolei znajdziemy port microUSB. Dzięki niemu możemy podłączyć quadrocopter do komputera i przeprowadzać konfigurację z użyciem BetaFlight.

Z tyłu z kolei wyprowadzono kolejne gniazdo, które służy do podłączenia linii sygnałowych do ESC. Kontroler lotu zasilany jest wprost z baterii i do tego celu używane są 2 piny obok gniazda dla ESC.

Ostatnia warstwa to właśnie ESC 4w1 o maksymalnym prądzie na silnik wynoszącym 10A. Regulatory obsługują protokół DShot 600 i taki jest ustawiony w kontrolerze lotu. Jego zaletą jest szybsze informowanie ESC o nowej, oczekiwanej prędkości silnika oraz fakt, iż dane przesyłane są cyfrowo. Oznacza to dokładniejsze sterowanie (większa granulacja i jednoznaczność otrzymanego sygnału) oraz zapobieganie błędom. Każda ramka sterująca dla ESC ma sumę kontrolną, która pozwala stwierdzić, czy dane wysłane przez kontroler lotu nie uległy zniekształceniu.
ESC 4w1 ma wyprowadzone piny dla poszczególnych silników. Nie są one duże, ale wystają poza obrys płytki i tym samym bardzo ułatwiają lutowanie.

Z tyłu quadrocoptera producent umieścił listwę z 4 diodami RGB. Ich podstawową funkcją jest poprawienie widoczności naszego koptera w powietrzu, ale nie jest to tożsame z oświetleniem, które znamy z LEDów na ramionach. W przypadku modeli do latania FPV, każde dodatkowe akcesorium tylko podnosi wagę, dlatego, szczególnie w mniejszych modelach, nie stosuje się diod. Jedynym wyjątkiem jest właśnie listwa z tyłu, która świecąc pokazuje osobom lecącym za nami gdzie się znajdujemy. W przypadku mijania się pod bramkami ma to znaczenie, bo tam robi się na ogół ciasno i chodzi o to, żeby ktoś, kto będzie próbował wyprzedzać, zauważył, że lecimy przed nim. Przypominam, że to, co widzi pilot przez kamerę pozbawione jest detali, więc jasno świecące LEDy łatwiej jest zauważyć, niż sylwetkę quadrocoptera, szczególnie przy szybszym locie.
Wiele kontrolerów lotu pozwala na sterowanie kolorem LEDów. Nie inaczej jest z F3, który jest w Aurorze 100. Domyślnie dwie skrajne diody migają na żółto, gdy skręcamy - jest to imitacja kierunkowskazów w samochodzie. Dwie środkowe świecą tym mocniej, im więcej gazu dodajemy.
Wybredni mogą swobodnie ustawić inne kolory sygnalizując: uzbrojenie koptera, tryb lotu, alarmy (np. rozładowania baterii). Swoboda jest dość duża.

Z tyłu koptera oprócz listwy LED znajdziemy także przewód zasilający oraz antenę, która została przepleciona pod LEDami. To ostatnie jest całkiem skuteczne - z pewnością nie wplącze się ona w śmigła, a jest na tyle elastyczna, że na pewno jej nie połamiemy.
Wtyk od zasilania to JST, który często spotkamy w bateriach 2S. Z racji tego, że pakiet mocujemy pod spodem - kable są daleko od śmigieł i nie powinny wejść z nimi w kolizję.

Baterię przyczepiamy pod kadłubem. Nie licząc plastikowych nakrętek, i łebków śrubek, które wystają poza obrys - pod spodem jest płasko. Aby bateria dobrze się trzymała, możemy użyć dołączonego rzepa, który mocujemy mniej więcej pośrodku. Zapewni to dobry rozkład masy i zagwarantuje, że środek ciężkości znajdzie się w tej samej odległości od każdego silnika.
Nasz pakiet musimy jeszcze przytrzymać dołączonym paskiem do baterii (ang. strap). Przeplatamy go pod kontrolerem lotu i wokół dolnej części kadłuba.

Baterię przyczepiamy do rzepu, a następnie zaciskamy paskiem. W ten sposób nie jest się ona w stanie przemieścić w żadnej płaszczyźnie. Sam pakiet jest dość płaski, więc kopter prezentuje się wciąż całkiem nieźle, nawet po jego założeniu.

Oprogramowanie
Aurora 100 jest w zasadzie oprogramowana i prawie gotowa do lotu. Musimy jedynie połączyć odbiornik z aparaturą (bindowanie) i o ile kanały sterowania się zgadzają - jesteśmy gotowi do lotu. Żeby jednak nie spotkała nas żadna niespodzianka, dobrze jest zainstalować BetaFlight i zweryfikować, czy wszystko działa tak, jak chcieliśmy.
Zaczynamy od zakładki Receiver. Tutaj możemy sprawdzić, czy nasz quadrocopter poprawnie interpretuje sygnały przesyłane z aparatury. Zależy nam na początku na pierwszych 4 sterujących, czyli Throttle, Roll, Pitch i Yaw. Jeżeli zdefiniowaliśmy jakieś dodatkowe kanały jako przełączniki na aparaturze to ich stan będzie wyświetlony w kolejnych na liście AUX1 aż do AUX9 zależnie od tego, ile dodatkowych ustawiliśmy.
Jeżeli kolejność kanałów się nam nie zgadza i np. Throttle zmienia nam się podczas wychylania manipulatora prawego w poziomie (roll) to musimy przestawić kolejność interpretowania kanałów z odbiornika. Aby to zrobić przechodzimy na pole tekstowe, w którym napisane jest 'TAER1234' lub podobnie. Jest to kolejność interpretowania kanałów odbiornika przez kontroler lotu. Każdy znak odpowiada kolejnym wejściom odbiornika. Powyższy napis oznacza, że pierwszy kanał to będzie (T)hrottle, drugi - (A)ileron, trzeci - (E)levator i czwarty - (R)udder. Jeżeli teraz zmienimy napis z TAER na RATE to zmienimy kolejność następująco: (R)udder - pierwszy, (A)ileron - drugi, (T)hrottle - trzeci oraz (E)levator - czwarty.

Warto teraz powiedzieć sobie, skąd wzięły się te nazwy i jak przekładają się na sterowanie kopterem. Otóż pochodzą one od samolotów RC, w których oznaczały poszczególne stery. Lotki (ang. Aileron) znajdują się na skrzydłach i pozwalają na przechylenie samolotu na skrzydło, czyli Roll.
Ster wysokości (poziomy) (ang. Elevator) znajduje się na ogonie i odpowiada za zmianę pochylenia - Pitch.
Wreszcie ster kierunku (ang. Rudder), który jest pionowy i również znajduje się na ogonie. Pozwala on skręcać w prawo i w lewo bez przechylania samolotu (nie do końca tak jest, ale uprośćmy), więc jest to Yaw.

Źródło: http://budowasamoloturc.com.pl/images/other/sam.png
Następną zakładką, która powinna nas zainteresować to "Modes". Ustawimy tam wszystkie możliwe tryby, które daje się zmienić przełącznikami na aparaturze. Dla mnie podstawa to uzbrajanie koptera (Arm) oraz (Air Mode). Z racji tego, że moja aparatura ma w zasadzie wyłącznie 3-pozycyjne przełączniki - uzbrojenie obejmuje pozycję środkową i krańcową. Air Mode zaś włącza się tylko w tej ostatniej.
Drugi z przełączników to tryby lotu (AUX 2). W domyślnej, górnej pozycji staram się mieć Angle, czyli tryb w pełni stabilizowany. Horizon (Rattitude) jest pośrodku. W momencie, gdy żaden z trybów nie jest włączony mamy Acro. W moim przypadku jest to krańcowa pozycja przełącznika drugiego.
Ostatnia opcja, którą uważam za ważną to Buzzer. Podpinam ją zawsze pod osobny przełącznik. W przypadku nieudanego lądowania (czytaj - quadrocopter w trawie, albo krzakach) mogę z aparatury włączyć pikanie, które naprowadzi mnie na jego pozycję. Uwierzcie mi, że zdejmując gogle nie zawsze wiemy, w którą stronę się udać.

Od tego momentu możemy już iść i latać. Ci, którzy lubią podłubać mogą czytać dalej. Najpierw pora na zakładkę "OSD". Z racji tego, że kontroler lotu ma wbudowane OSD (and. On-Screen Display), możemy je konfigurować bezpośrednio w BetaFlight.
Z ważniejszych informacji możemy na podglądzie FPV wyświetlić: czas lotu, bieżące napięcie baterii, pobierany prąd, RSSI (siła sygnału, który dochodzi z aparatury), sztuczny horyzont, tryb lotu (Acro, Stabilized), nazwę pilota / koptera. Po zakończonym locie otrzymujemy także podsumowanie podstawowych parametrów lotu - wykorzystanych mAh, maksymalnego prądu oraz czasu w powietrzu.
Pomiar napięcia działa prawidłowo, więc warto mieć go na podglądzie podczas lotu, podobnie jak RSSI, które w FrSky działa właściwie. Z kolei prąd chwilowy, a więc i wykorzystanie mAh są liczone niewłaściwie i wydaje mi się, że czujnika pomiaru prądu w ogóle nie ma w ESC, więc wyłączyłem i sam sensor i wskazanie tego parametru po stronie OSD.

Możemy też pobawić się ustawieniami diod LED. Ja postanowiłem zmienić kolor migającego paska z czerwonego na niebieski. Wyłączyłem też wskazanie throttle na dwóch środkowych diodach, ale pozostawiłem "kierunkowskazy" na obu skrajnych.

Ekran PIDów pozwala zmienić nie tylko zachowanie samego kontrolera, ale również dynamikę, z jaką quadrocopter będzie reagował na ruchy manipulatorami. Tutaj kopiuję jednego z członków RotorRiot - StingersSwarma. W RC Rate ma on wpisane 0.83, natomiast Super Rate ustawia na 0.87. Taka konfiguracja powoduje, że z jednej strony mamy precyzyjną kontrolę nad modelem przy niepełnych wychyleniach drążków, a jednocześnie skrajne pozycje umożliwiają nam wykonywanie błyskawicznych przewrotów. Mimo niewielkich rozmiarów i baterii 2S, Eachine Aurora 100 radzi sobie z tymi manewrami zadziwiająco dobrze. Z pewnością nie bez znaczenia jest tutaj DShot 600, który jest domyślnym protokołem używanym w komunikacji z ESC.
Komplet ustawień regulatora PID dobrany przez producenta jest w moim odczuciu naprawdę bardzo dobry. Nagranie, które prezentuję nieco dalej powinno być najlepszym tego dowodem.

Ekran konfiguracyjny ("Configuration") pozwala nam zweryfikować podstawowe ustawienia naszego quadrocoptera. Na pierwszej części ekranu warto zwrócić uwagę na protokół, który wykorzystuje kontroler lotu w celu komunikacji z ESC - jest to DSHOT600. Jest to protokół cyfrowy, który po pierwsze zapewnia bardzo szybkie informowanie ESC o zmianach wartości sygnału sterującego, a ponadto zapobiega potencjalnym zakłóceniom, ponieważ każda ramka ma swoją sumę kontrolną i może być zweryfikowana przed ustawieniem żądanej prędkości silnika.
Domyślnie jest ustawiona opcja "MOTOR_STOP", która oznacza, że po uzbrojeniu, silniki nie będą się obracać. Gdybyśmy ją wyłączyli - pracowałyby one na najniższej możliwej prędkości zgodnej z wartością pola: "Min_Throttle", która określa jaka wartość sygnału (od 1000 do 2000) zostaje podana na ESC.
Jeżeli kupiliście model z odbiornikiem FrSky to w sekcji receiver będziecie mieli wybrane opcje: "Serial-based receiver" oraz protokół - SBUS. Ponownie jest to cyfrowy sposób komunikacji i co ważniejsze - wymaga tylko jednego przewodu sygnałowego. Oznacza to, że taki odbiornik podłączamy w sumie 3 kabelkami: zasilanie (5V, GND) oraz sygnał.

W ramach drugiego ekranu możemy wyłączyć czujnik natężenia prądu - "Current Sensor". Procesor na kontrolerze lotu nie będzie musiał się zajmować czytaniem i interpretacją tej wartości, a jak już wspomniałem wcześniej - będzie ona i tak błędna. Generalna zasada jest taka, że jeśli nie używamy danej funkcji, lepiej ją wyłączyć - procesor będzie miał mniej pracy.
W domyślnej konfiguracji kontroler lotu działa z dość częstymi czasami odświeżania zarówno odczytów z żyroskopu, jak i liczeniem wartości dla kontrolera PID. Dla tego pierwszego jest to 8kHz (8000 odczytów na sekundę), natomiast dla regulatora PID parametry wyznaczane są z częstotliwością 2 kHz, czyli 2000 razy na sekundę. Nie będziemy teraz wchodzić w szczegóły, ale ogólnie - im wyższa wartość tym lepiej. Limitem jest zawsze procesor, który może wykonać określoną liczbę operacji w czasie i wzrost wspomnianych wartości przekłada się również na zwiększenie procentowego obciążenia CPU. W Aurorze wynosi ono około 23-25%, co jest wartością bezpieczną. Wysoka częstotliwość odświeżania obu wartości wraz z DSHOTem przekładają się na bardzo sprawne zachowanie koptera w locie.

Przewijając ekran jeszcze niżej dochodzimy do opcji związanych z obsługą różnych akcesoriów przez kontroler lotu. Ja pozostawiłem tylko 2 z nich - LED_STRIP, czyli pasek LED z tyłu koptera oraz OSD, które jest zintegrowane z kontrolerem lotu. Na pewno możemy wyłączyć BLACKBOX oraz SD_CARD, ponieważ nasz kopter nie ma gniazda na kartę microSD, a skoro go nie posiada i nie ma wbudowanej pamięci to nie jest w stanie zapamiętywać parametrów w trakcie lotu (Blackbox).
W polu Craft Name możemy też zmienić nazwę "Aurora100" na jakąś własną. To co wpiszemy w tym polu, pojawi się nam na OSD, aby łatwiej było nam rozpoznać, że widzimy obraz z naszego koptera, a nie sąsiada, z którym się ścigamy.

Eksploatacja
Do Aurory 100 pasują śmigła 2-calowe, które mają 2 otwory na śrubki obok wchodzącego centralnie wałka silnika. Z racji tego, że bardzo szybko połamałem to, co było w komplecie, eksperymentalnie kupiłem 5-płatowe Racerstary 2035, czyli 2 cale średnicy, o skoku 3,5". W moim odczuciu model lata na nich równie dobrze, jak na oryginalnych 4-płatowych. Niestety pękają niemalże równie łatwo, jak poprzednicy. Podobno warto rozważyć Gemfany 2035, tyle że to wariant dla bogatszych, bo za komplet (4 śmigła) zapłacimy bagatela ok. 14 zł. W porównaniu z 20 sztukami (10 par) Racerstarów za ok. 32 zł - różnica jest widoczna gołym okiem. Oczywiście nie przekreślam Gemfanów, ale jeśli są tak trwałe, jak reszta to latanie na nich Aurorą 100 może się okazać naprawdę drogą zabawą. Oczywiście antena od FPV, która, jak wspominałem, nie jest dobrze zabezpieczona przed upadkami, pękła zgodnie z oczekiwaniem. W 5 locie złamało się łączenie pomiędzy górną i dolną częścią "koniczynki". Przewidując taki rozwój wydarzeń, zamówiłem komplet miniaturowych anten RealAcc, które można wlutować na miejsce oryginalnej. Różni się tym, że ma srebrny kolor i 4 listki, zamiast 3. Poza pękającymi śmigłami i uszkodzeniem anteny nie miałem dotychczas dodatkowych przygód z Aurorą 100. Oba problemy można próbować rozwiązać. Producent wypuścił niedawno osłony na śmigła, które mocuje się od spodu ramion, tymi samymi śrubami, które trzymają silniki. Nie są one zbyt drogie, ale też nie liczyłbym na przesadną ich trwałość. Aurora mimo wszystko swoje waży, a w tym momencie cała siła skupia się wyłącznie na nich. Dopóki nie przetestuję - nie zniechęcam i nie polecam - wyjdzie w toku eksploatacji. Kwestia wystającej anteny daje się rozwiązać dwojako. Eachine przygotowało osłony na antenę w postaci dwóch półkolistych elementów mocowanych na przodzie górnej części kadłuba. Trzeba co prawda w jednym miejscu je przykleić, ale w zamian antena znajduje się całkowicie w ich obrysie. Niestety ze względu na to, że wykonano je z włókna węglowego, mogą one pogarszać sygnał FPV. Alternatywa dla osłony od Eachine to albo element dedykowany stworzony na drukarce 3D albo nieco toporna, ale skuteczna opaska elastyczna. Sprawdziłem na razie to drugie rozwiązanie. Wziąłem dość grubą opaskę i przeciągnąłem ją poprzecznie przez otwory w górnej części ramy w taki sposób, aby jej owal wystawał ponad kadłub i antenę. Nie jest to oczywiście osłona sensu stricte, ale chodzi o to, żeby siła uderzenia skupiła się na miękkiej opasce, a nie na sztywnej antenie. Na razie zdaje egzamin. W razie czego mam jeszcze 2 anteny w zapasie. Zdjęcie tego rozwiązania mogliście zobaczyć na samym początku wpisu. Aurorę 100 lepiej ocenić podczas lotu po prostu oglądając poniższe nagrania, ale stwierdziłem, że warto napisać tutaj parę słów. Śmigła nie wprowadzają zauważalnego "jello" podczas latania, więc do ich wyważenia nie można mieć zastrzeżeń. Zarówno 4, jak i 5-płatowe zachowują się podobnie w powietrzu i nie wyczułem między nimi większej różnicy. Są one lekkie, więc silniki nie mają problemu z ich rozpędzaniem i wyhamowywaniem. Warto jeszcze raz przypomnieć, że Eachine w końcu dodaje baterię, która ma wystarczającą wydajność prądową dla tego koptera. Nawet, gdy mocno "dociskamy" Aurorę 100 w trakcie lotu, nie da się odczuć spadków mocy, czy problemów z zanikaniem zasilania. Całe szczęście, że Eachine w tym względzie dokonało niezbędnych zmian. W moim odczuciu Aurora 100 zachowuję się w powietrzu naprawdę rewelacyjnie i latam nią z prawdziwą przyjemnością. Nie jest to urządzenie, które zastąpi nam duży kopter klasy 250, czy 225, ale jest idealną zabawką do polatania po parku, w którym nie mamy aż tyle przestrzeni, aby bezpiecznie uruchomić większy model. Aurora 100 to model, który bardzo polubiłem. Zaskoczył mnie niezłą jakością wykonania, ale najbardziej urzekł w locie. Połączenie 4-płatowych śmigieł, ESC obsługujących protokół DSHOT i baterii 2S dało kopter, który nie wstydzi się stać obok swoich 2x większych braci. Oczywiście nie jest w stanie stanąć z nimi w konkury, ale jego dynamika jest wystarczająca, aby wywołać szeroki uśmiech na twarzy i dać satysfakcję z przeciskania się przez szczeliny, których nie mogą pokonać modele o większym rozstawie ramion. Jest to również dużo szybsza zabawka, niż szczotkowi odpowiednicy i np. KingKong Q100 mimo wszystko nie ma aż takich możliwości, jak Aurora 100 będąca w tej samej klasie pod względem rozmiaru. W moim odczuciu quadrocopter od Eachine ma dwie dostrzegalne wady - niezabezpieczoną antenę FPV oraz bardzo kruche śmigła. Jeśli skonstruujemy lekką osłonę na tą pierwszą i zmienimy śmigła na coś twardszego, albo kupimy ich po prostu wystarczająco dużo to quadrocopter odpłaci nam z nawiązką za wydane na niego dodatkowe środki. Latanie w parku lekkim modelem z OSD i nadajnikiem FPV o mocy 25mW jest naprawdę sporą frajdą, a stabilność w połączeniu z dużą dynamiką lotu modelu od Eachine stawia innym producentom poprzeczkę naprawdę całkiem wysoko. Jeżeli nie zniechęci Was nieco toporny wygląd, to po drobnych modyfikacjach Aurora 100 powinna sprawić Wam tyle samo radości, co jej więksi odpowiednicy. Ocena 4Śmigła.pl: 4.5 / 5.0
Ja na razie kupiłem komplet 10 par Racerstarów 2035 4-płatowych i

Grzywa10, którego znacie z forum radzi też rozważyć zakup miękkiej i krótkiej anteny dipolowej (tzw. bacika), który dużo trudniej jest uszkodzić, ale kosztem pewnej straty jakości sygnału w stosunku do stosowanej "koniczynki". Wybór pozostawiam Wam. Jeżeli przetestuję któreś z podanych tutaj rozwiązań - podzielę się tym na blogu.Charakterystyka lotu
Po pierwsze Aurora 100 ma ustawione fabrycznie PIDy. Nie są to domyślne wartości z Betaflight, ale dobrane specjalnie pod kopter od Eachine. Muszę przyznać, że model na takich ustawieniach zachowuje się bardzo dobrze. Quadrocopter jest w stanie wykonywać szybkie przewroty i natychmiast stabilizować się po ich wykonaniu - nie ma bounce-back, czyli odbicia w drugą stronę spowodowanego przesadną korektą podczas zatrzymywania obrotu. Kopter bardzo stabilnie się też wznosi. Mimo, iż wgrana wersja Betaflight - 3.1.0 nie obsługuje jeszcze opcji "anti-gravity" - kopter nie pochyla się w żadną stronę podczas gwałtownego unoszenia. Model prowadzi się miękko - wydaje się w powietrzu bardzo lekki przez dobrze dobrany parametr "D", dzięki któremu silniki nie stawiają zbyt dużego oporu podczas manewrów.Podsumowanie
![]()
![]()
![]()
![]()
![]()
{kind=link}