
Firma, której produkt dziś recenzuję, szturmuje rynek Tinywhoopów, sprzedając wyłącznie koptery na ramach 65mm, 75mm i 85mm. Nic więcej - koncentrują się na malutkich modelach, ale cały osprzęt produkują i dostarczają sami. BetaFPV, bo o niej dziś mowa, zaczęła od modeli szczotkowych, potem bezszczotkowych, a jednym z najnowszych produktów jest kopter na ramie 75mm, który ma silniki bezszczotkowe w rozmiarze 1103 (szerokie i niskie) i lata na baterii 2S. Jest to próba wprowadzenia na rynek kategorii modeli wyścigowych, ale dużo mniejszych, zdolnych latać na ciaśniejszych przestrzeniach, ale wciąż rozwijających spore prędkości. Oto właśnie Beta 75X!
W pudełku
Beta75X trafiła do mnie w kartonowym pudełku, które było opatrzone jedynie logiem firmy, zdjęciem modelu i oczywiście informacją, że mam do czynienia z "X Series", czyli serią, która w odróżnieniu od poprzedników lata na pakietach 2S.

W samym pudełku czeka na nas przede wszystkim sam kopter. Został on umieszczony w gąbce, która została wycięta dokładnie do jego kształtu. Wygląda to porządnie, a w połączeniu z twardą tekturą, z której wykonane zostało pudełko - mamy gwarancję, że model dotrze do nas w jednym kawałku.

Dodatkowo w komplecie znajdziemy woreczek z zapasowymi częściami. Producent dołączył kadłub oraz pełny komplet śmigieł. To miły akcent, ale jak zobaczycie dalej - zupełnie minimalny zestaw, szczególnie jeśli nie jesteście przesadnie wprawieni w lataniu. Daję słowo, że na pewno szybko po nie sięgniecie i nie będzie to ostatnia ich wymiana.

Wraz z kopterem otrzymujemy oczywiście baterię. Pakiet Litowo-polimerowy o pojemności 350mAh, składający się z dwóch cel, czyli 2S. W odróżnieniu od ogniw 1S dodawanych przez BetaFPV, ten ma napięcie znamionowe 7.4V (3.7V na celę), czyli nie jest to typ HV ładowany do 4.35V na celę, tylko typowe 4.2V. W przypadku tego pakietu ładujemy go więc do 8.4V. O ile kopterom na 1S przydaje się ten dodatkowy "pazur", o tyle w przypadku 2S nie ma sensu wykańczać ogniwa i ładować go do wyższego napięcia, niż zwykle - całkiem rozsądny wybór zważywszy na to, że Becie 75X na pewno mocy nie zabraknie! Producent oferuje model w dwóch wersjach - ze złączem JST PH2.0 i XT-30. Z uwagi na to, że to pierwsze grzeje się pod tak dużym obciążeniem i może samo z siebie limitować przepływ prądu, wszyscy, łącznie ze mną, polecają wybierać XT-30. Całość będzie niewiele cięższa, a będziemy mieli pewność, że wyeliminowaliśmy słabe ogniwo z całego układu zasilania.
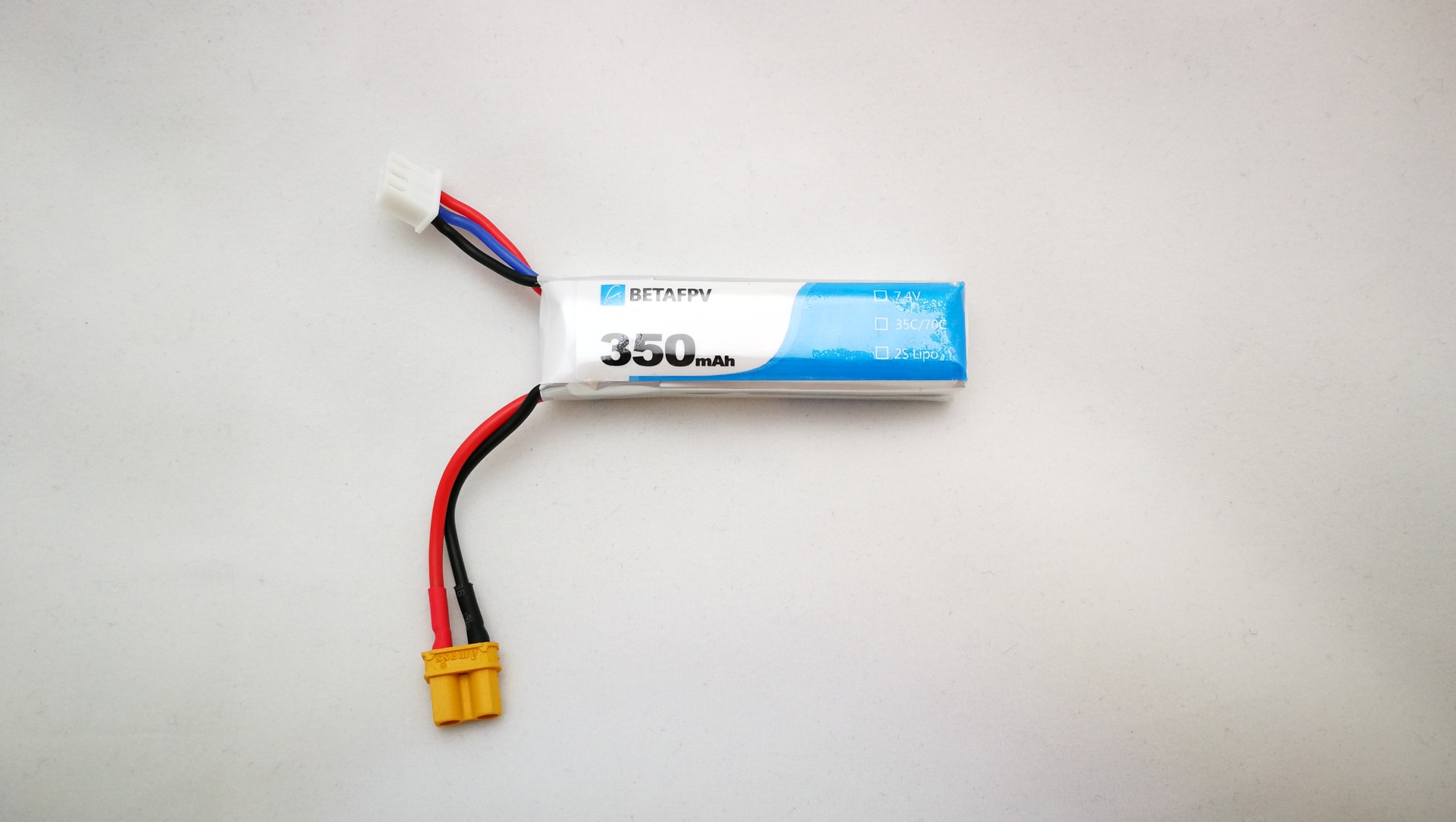
W komplecie nie znajdziemy jednak ładowarki, więc musimy się zaopatrzyć w nią we własnym zakresie. BetaFPV nie ma w asortymencie takiego urządzenia, są jedynie sprzęty do ładowania pakietów 1S. Pamiętajmy jedynie o tym, że musimy mieć przewód zakończony XT-30. W zasadzie wszystkie ładowarki mają na wyjściu albo złącze bananowe, albo XT-60, więc zależnie od tego, którą my posiadamy, może być konieczna przejściówka. Ja korzystam z Balance Board z wejściem XT-60 i 6 wyjściami XT-30, ale mam też pojedyncze, samodzielnie zrobione przejściówki z XT-60, na XT-30. Wystarczy tylko kawałek przewodu i zlutowanie ze sobą "+" i "-" obu wtyków oraz zabezpieczenie termokurczką.
Budowa
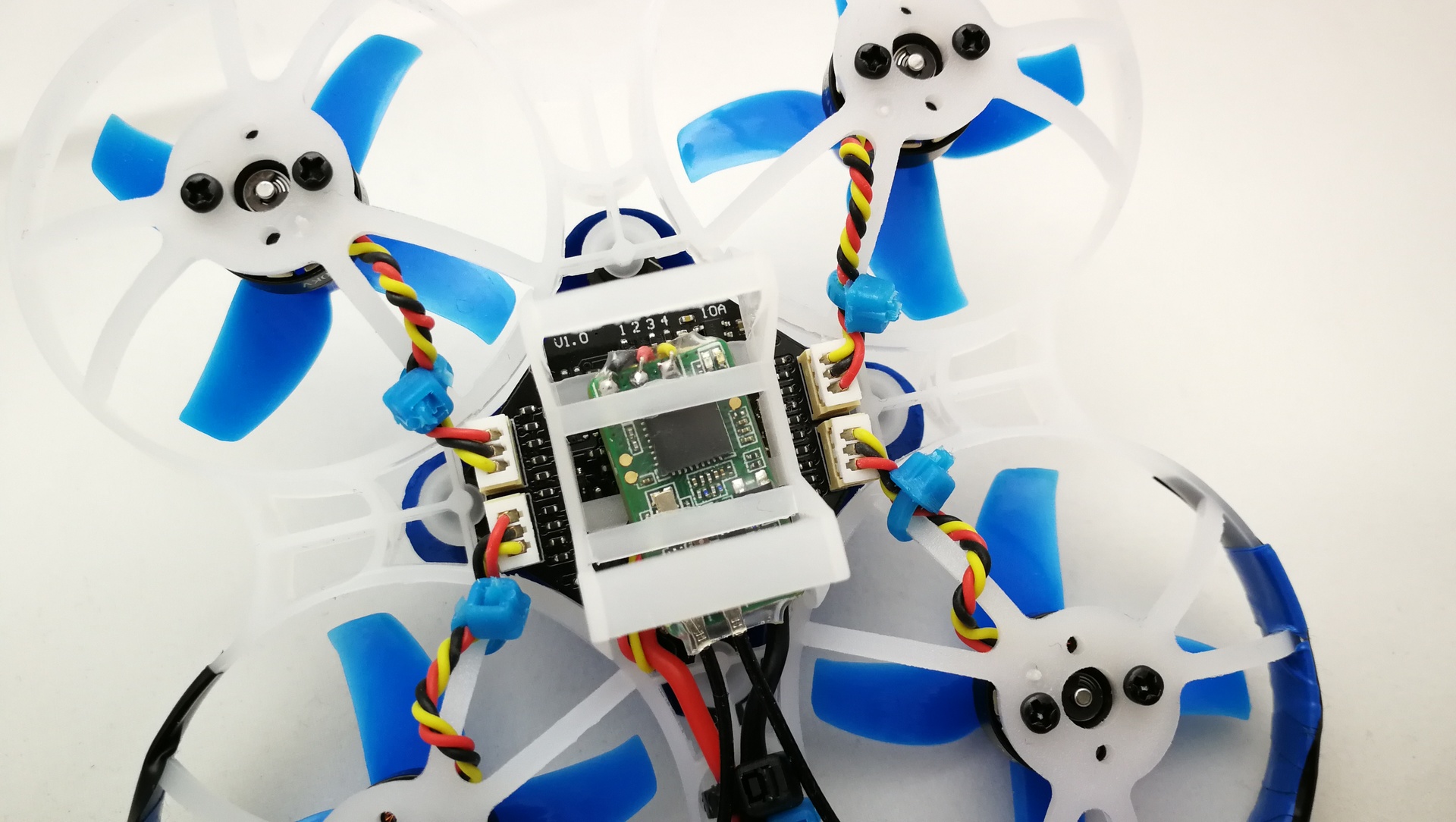
BetaFPV jest już dość znana ze swoich wytrzymałych ram do kopterów. Moje dotychczasowe doświadczenie potwierdza tą opinię. Beta 75X osadzona jest na mlecznobiałej ramie, wykonanej prawdopodobnie z poliwęglanu. Jest ona giętka, ale jednocześnie nie pęka przy uderzeniach.

Kopter lata na silnikach w rozmiarze 1103 (szerokie i niskie). Zważywszy na to, że zasilany jest 2S, jego KV wynosi 11000, co i tak daje gigantyczną maksymalną prędkośc obrotową (teoretycznie ponad 80.000). Zwracam uwagę na to, że mimo, iż silnik jest niewielki, ma mocowanie na 4 śrubki zamiast 3 (co znamy z bezszczotkowych kopterów 1S). Z uwagi na redukcję masy (prawdopodobnie) fabrycznie wkręcone zostały jedynie 2.
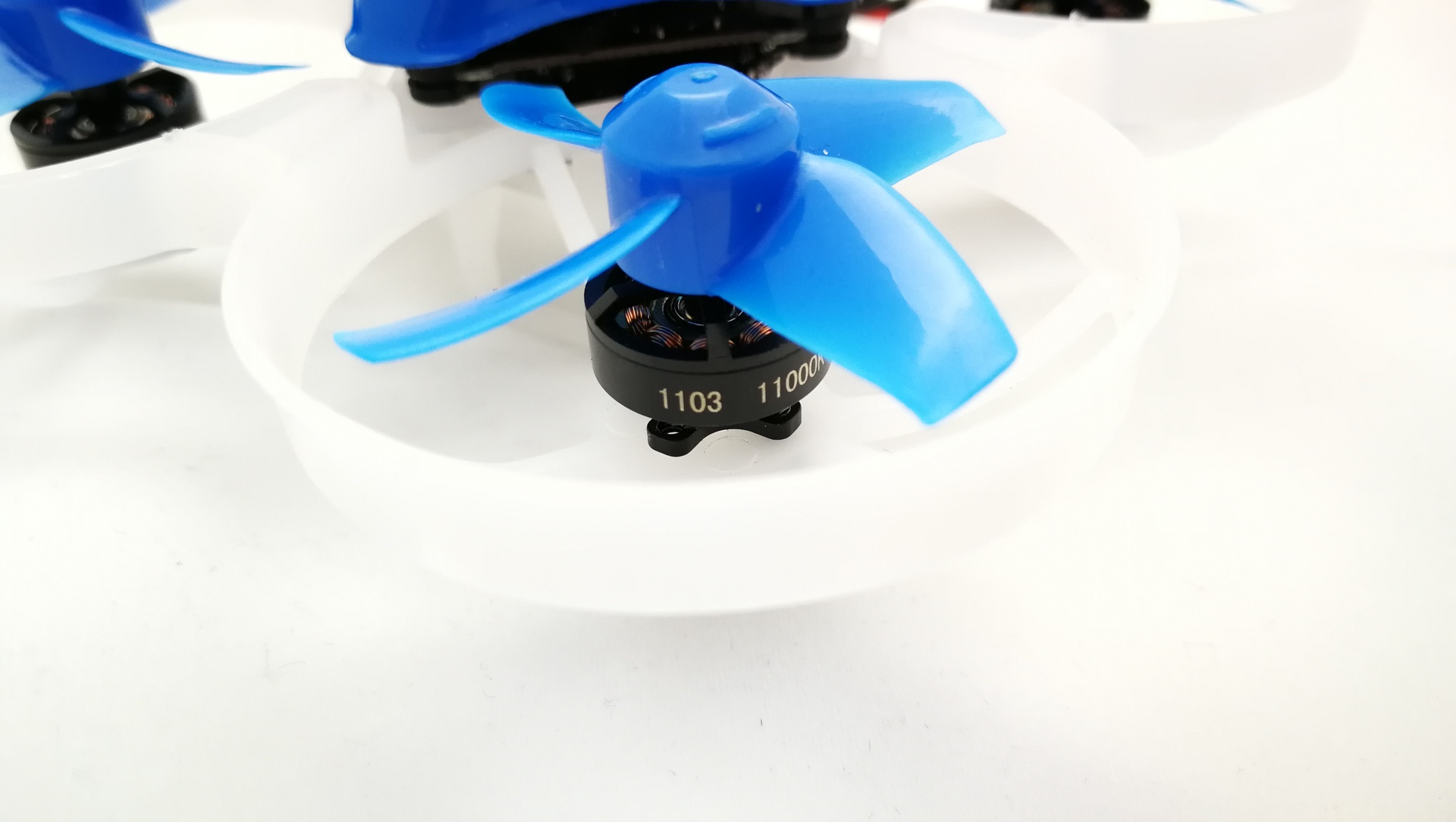
Śmigła mają 4 płaty i dość dużą piastę. Rama przy uderzeniu ugina się na tyle, że krawędzie śmigieł mogą się ścierać, ale raczej nie pękają. Bardziej wrażliwa okazała się sama piasta, która pękła, gdy kopter upadł do góry nogami. Pamiętajmy jednak, że model na 2S jest dość szybki, a więc i przyjmuje większe siły przy uderzeniach. Znosi to dzielnie.

Kadłub nie zmienił się pomiędzy modelami, co powoduje, że jeśli zdecydowaliśmy się na dowolny w zasadzie kopter od BetaFPV, dostaniemy ten sam typ. Mocowany jest na 2 śrubki, które trzymają jego boki. Kamera nieznacznie wystaje poza przygotowany otwór i jest dość dobrze chroniona. W modelach 1S kadłub sprawował się dobrze i nieźle znosił uderzenia. Zwiększenie masy i prędkości w serii "X" spowodowało jednak, że ujawniła się jego sztywność i kruchość. Już drugi lot spowodował, że kadłub popękał na tyle, że swobodnie było widać nadajnik FPV i kontroler lotu w środku. Na szczęście BetaFPV zapobiegliwie dodaje drugi, zapasowy, tym niemniej na pewno nie będzie on ostatnim, szczególnie jeśli zamierzacie często latać.

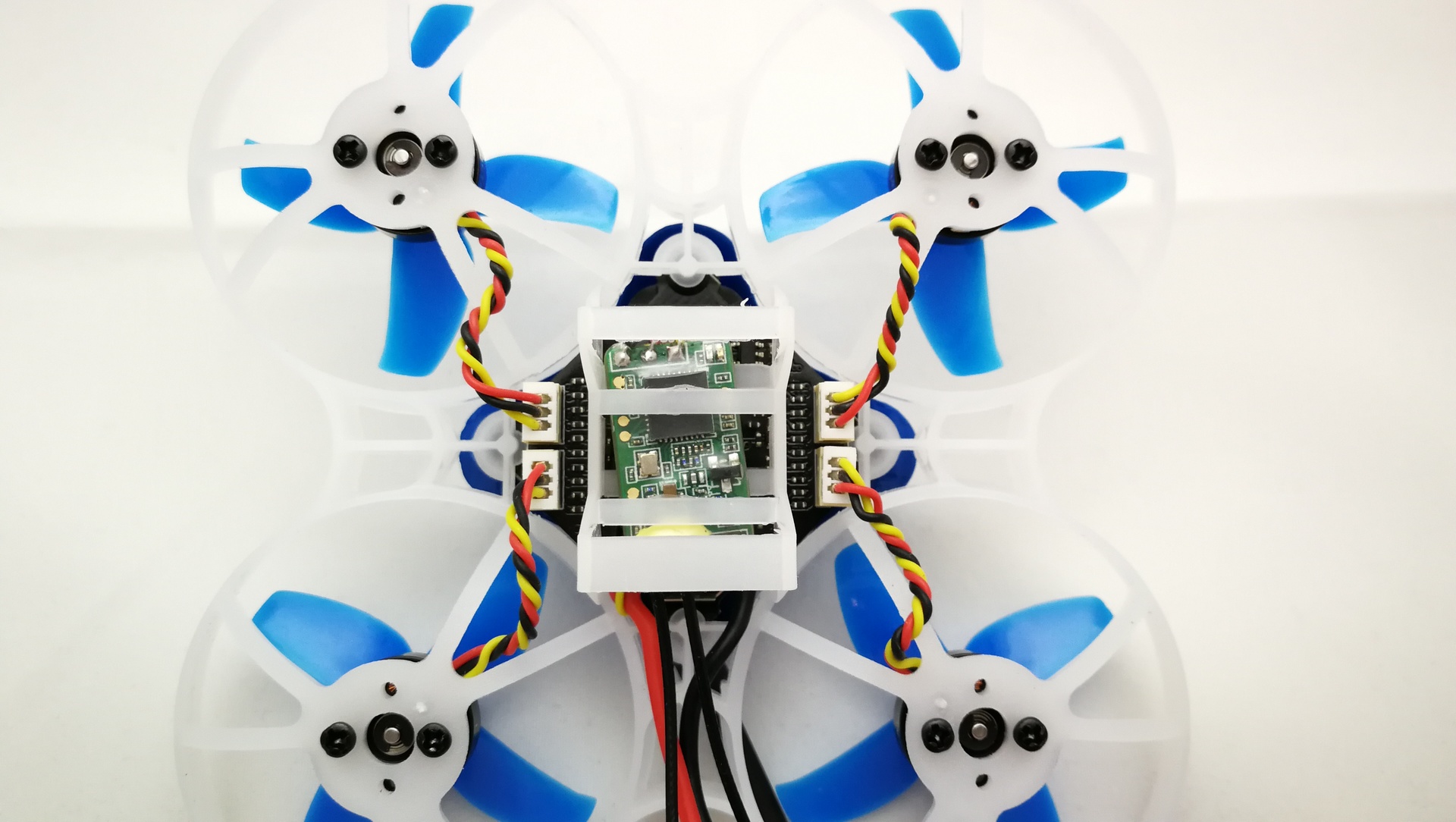
W moim modelu, wersji FrSky FCC, producent dołączył osobny odbiornik - XM+. Jest on mały i choć nie ma telemetrii, w zamian posiada 2 anteny, które powodują, że obsługuje on pełny zasięg deklarowany przez FrSky (Full Range 1km+). Rama koptera ma dodatkową półeczkę, pomiędzy ESC, a koszykiem na baterię, na której idealnie mieści się odbiornik. Powoduje to, że wkładając i wyjmując pakiet nie zahaczymy o któryś z przewodów, albo antenę.
Skoro już jesteśmy przy antenach. Producent dostarcza kopter, w którym zostały one po prostu luźno wyprowadzone w kierunku tylnej części ramy. Akurat są one na tyle długie, że zostawienie ich luzem prędzej, czy później skończy się albo ich wkręceniem w silnik, albo odpowiednim przystrzyżeniem przez szybko wirujące śmigła. Nieco później omawiam, co z nimi zrobiłem, ale zostawienie ich w ten sposób to proszenie się o kłopoty.
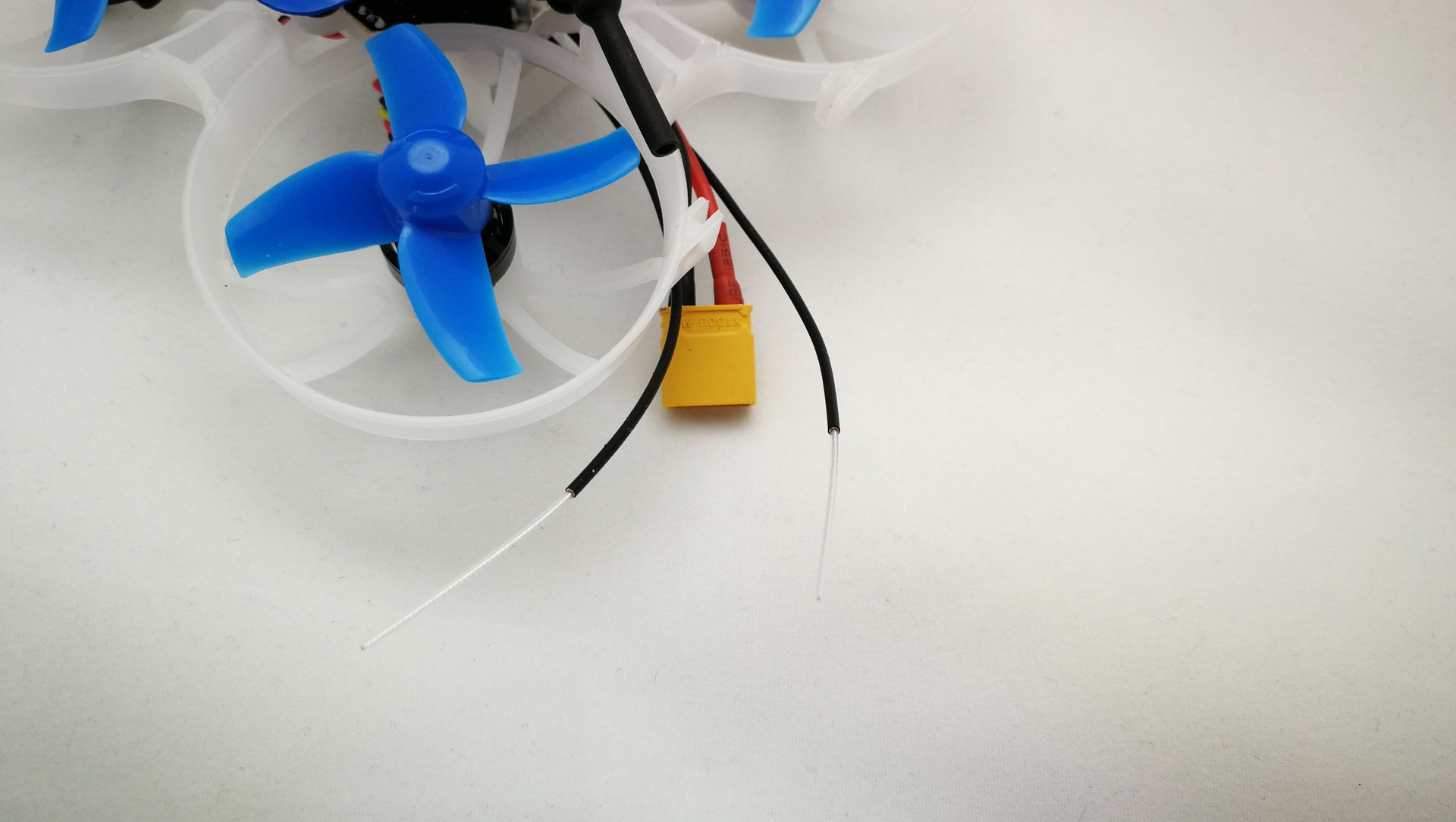
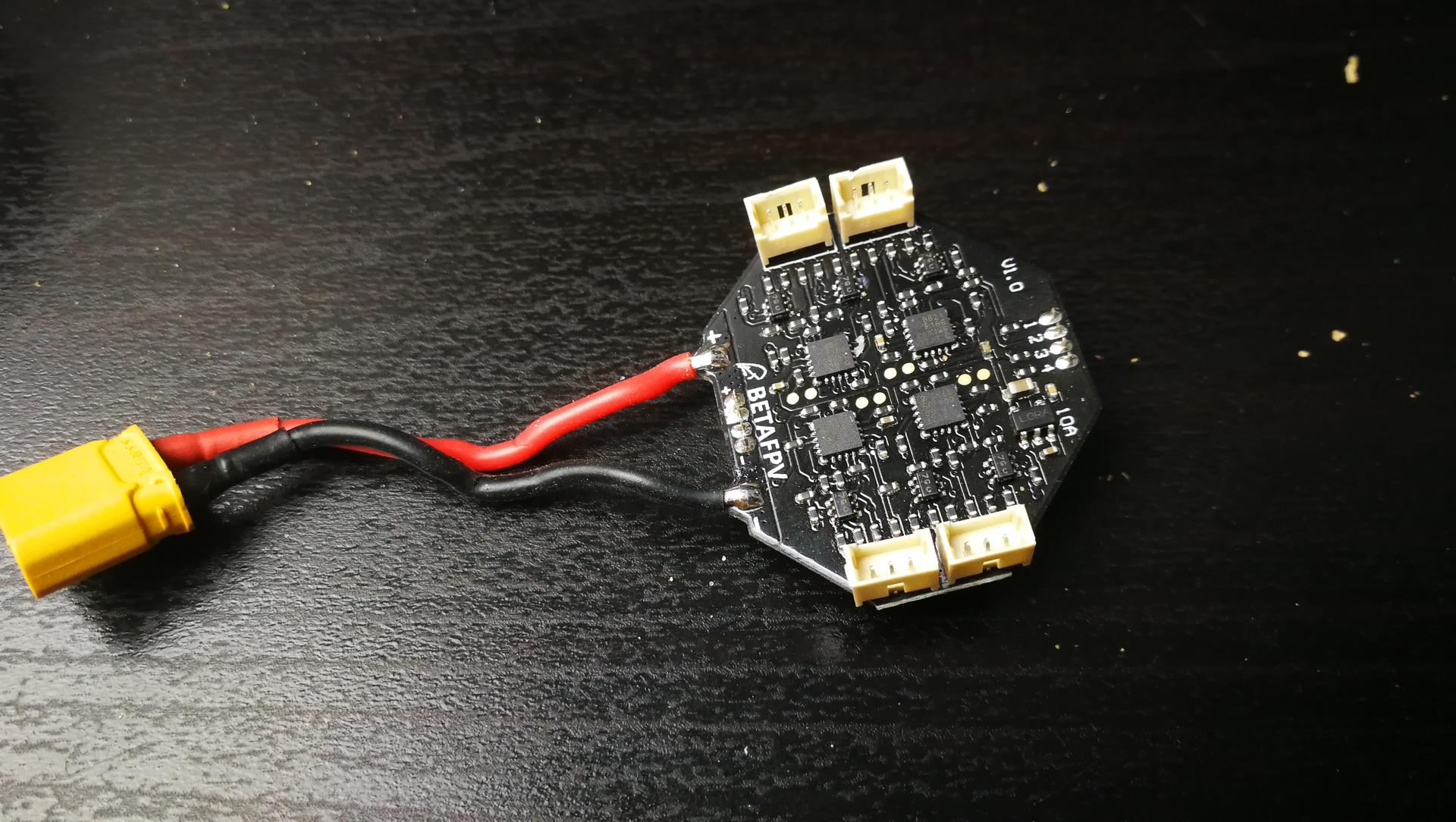
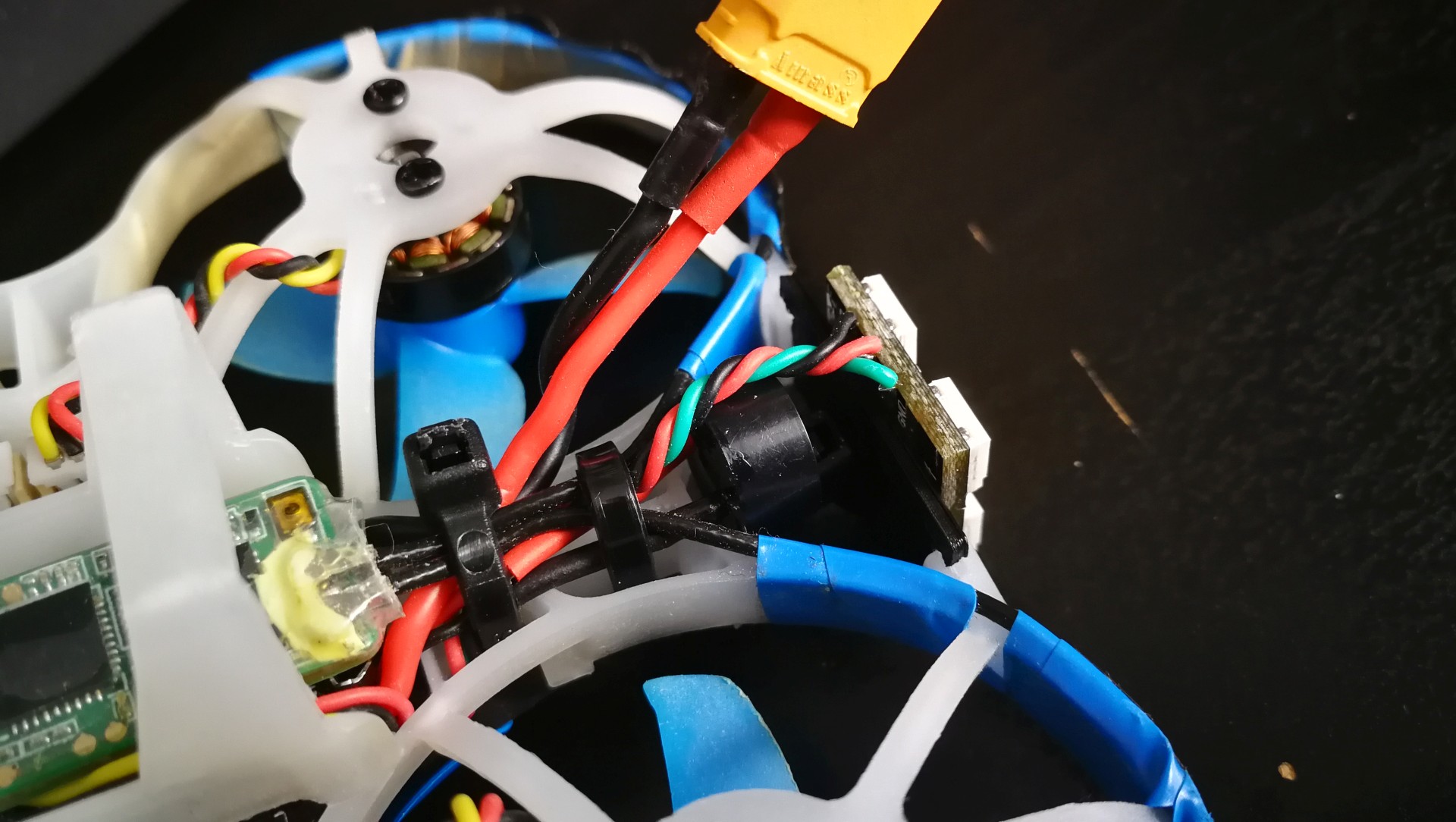
Wspomniałem już wcześniej, że zasilanie doprowadzone jest poprzez złącze XT-30. Przewód jest dość długi, co umożliwi nam wygodne podłączenie praktycznie każdego ogniwa Li-Po. Przy okazji zwróćmy uwagę na wspomniane już 2 śrubki, które mocują silnik - tak został on zamocowany fabrycznie. Jak już zaglądamy od spodu koptera, warto jeszcze zwrócić uwagę, że przewód zasilający trzyma się wyłącznie na punktach lutowniczych na samym ESC. Oznacza to, że wielokrotne jego szarpanie może uszkodzić fabryczne mocowanie. Poprawimy i to nieco dalej.
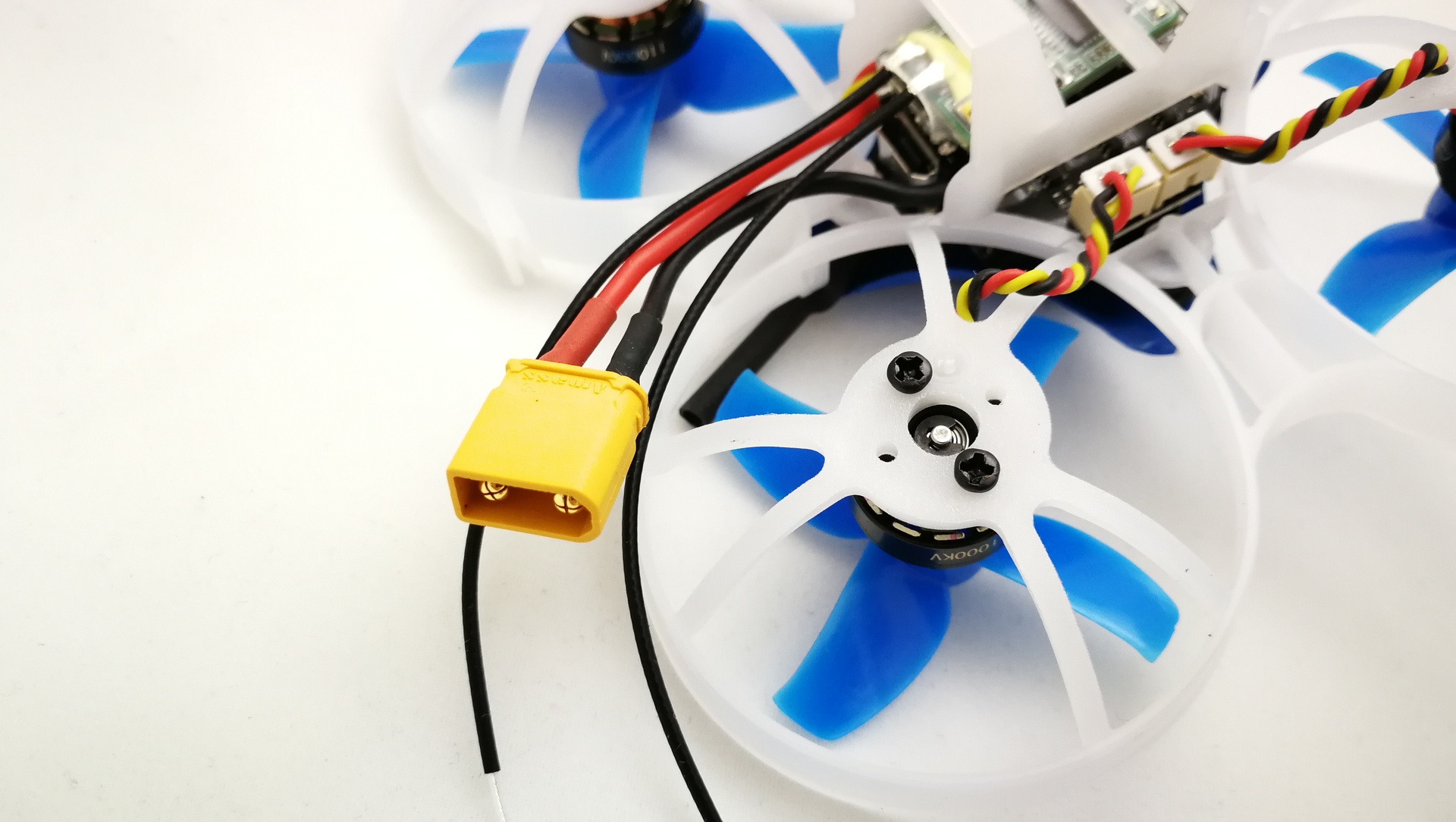
Silniki podłączone zostały do ESC poprzez wtyk 3-pinowy Molex Picoblade 1.25mm. Jest to bardzo popularne rozwiązanie w tych małych bezszczotkowcach, więc nie powinniśmy być zaskoczeni. Nieco zaniepokojony byłem wyłącznie poprowadzeniem przewodów, które są nie za długie, ale wciąż pozostaje ryzyko, że niefortunnie się ułożą i dostaną zbyt blisko śmigieł. W ramie nie ma żadnych wycięć, którymi moglibyśmy je poprowadzić. Moją poprawkę tego drobnego problemu opisałem też nieco dalej.

Antena nadajnika FPV, jak to zwykło być w kopterach od BetaFPV, została wyprowadzona tyłem, wzdłuż osi ramy. Jej asymetryczne lutowanie do samej płytki powoduje, że nie biegnie ona niestety prosto, a częściowo zachodzi nad jeden z silników. Oczywiście przyszłość anteny skazana na łaskę wirującego śmigła jest tylko jedna, więc i ten drobny element powinniśmy poprawić, nim wybierzemy się latać.

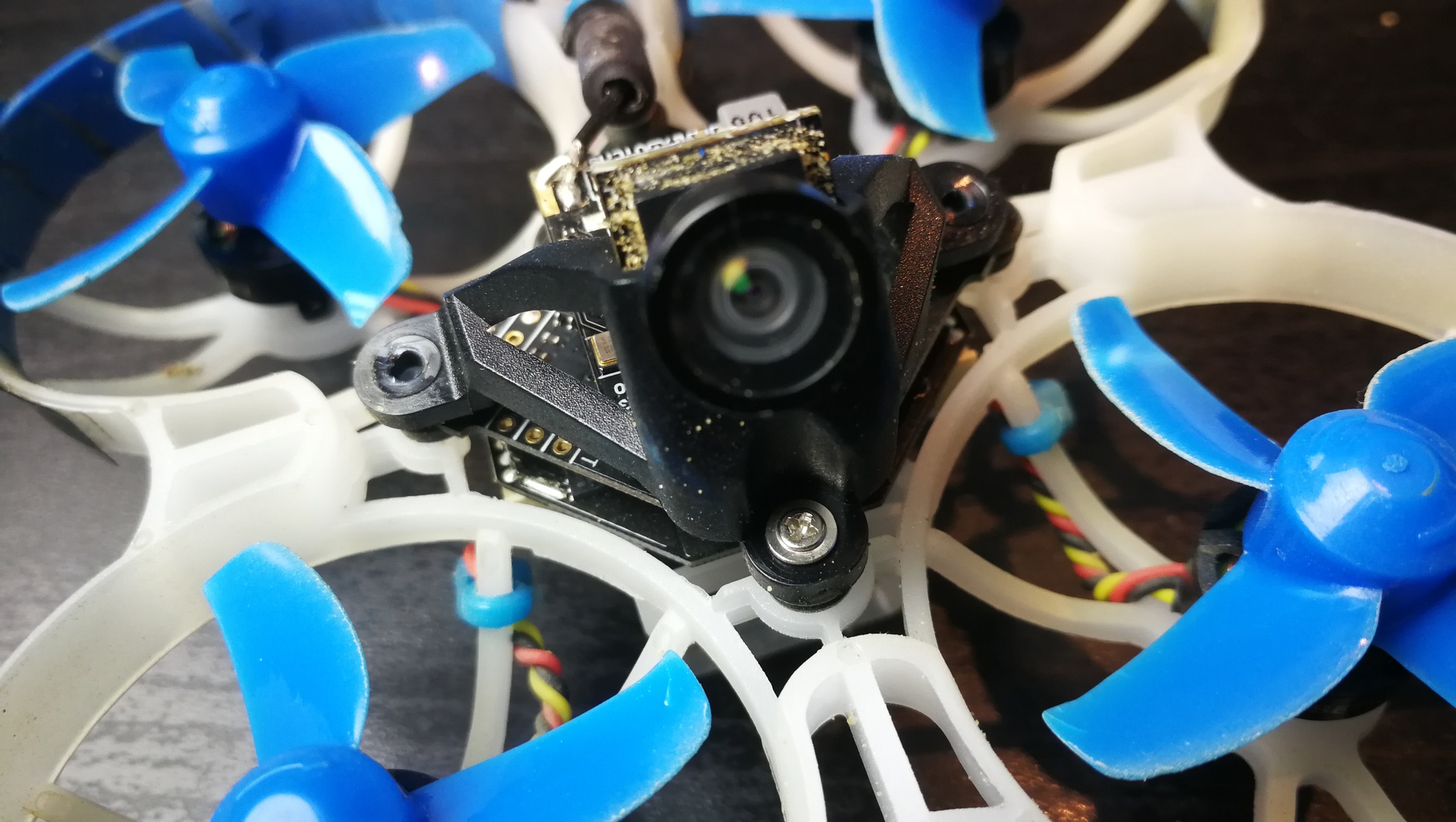
Zadowolony natomiast jestem z kamery FPV. Jest ona mocno szerokokątna, pochylona nieco agresywniej, niż w modelach szczotkowych od BetaFPV, co z uwagi na pakiet 2S jest uzasadnione, ponieważ Beta 75X z założenia ma nam służyć do latania na zewnątrz i szybko. W porównaniu z kamerą od Mobuli 7, kolory są nieco żywsze, a obraz bardziej kontrastowy. W odróżnieniu od konkurenta, Beta 75X ma kamerę pochyloną pod stałym kątem 35 stopni. Wydawałoby się, że to dużo, ale dzięki temu przy szybszym locie widzimy wszystko przed sobą. Pochylenie kamery jest takie, że w domu latać jest trudno, ponieważ nie poruszamy się tak szybko i soczewka przez większość czasu patrzy pod kątem w górę. Z kolei podczas lotu na maksymalnej prędkości, kamera skierowana jest głównie w stronę ziemi, mimo jej szerokiego kąta. Natomiast uczciwie należy powiedzieć, że jest moim zdaniem ustawiona optymalnie, ponieważ oba przypadki uważam za dość skrajne, natomiast do typowego latania, robienia prostych figur w trybie Acro, czy przelatywania przez różne ciasne miejsca z przyzwoitą prędkością - kamera pozwala nam zobaczyć dokładnie to, co trzeba.

Budowa wewnętrzna
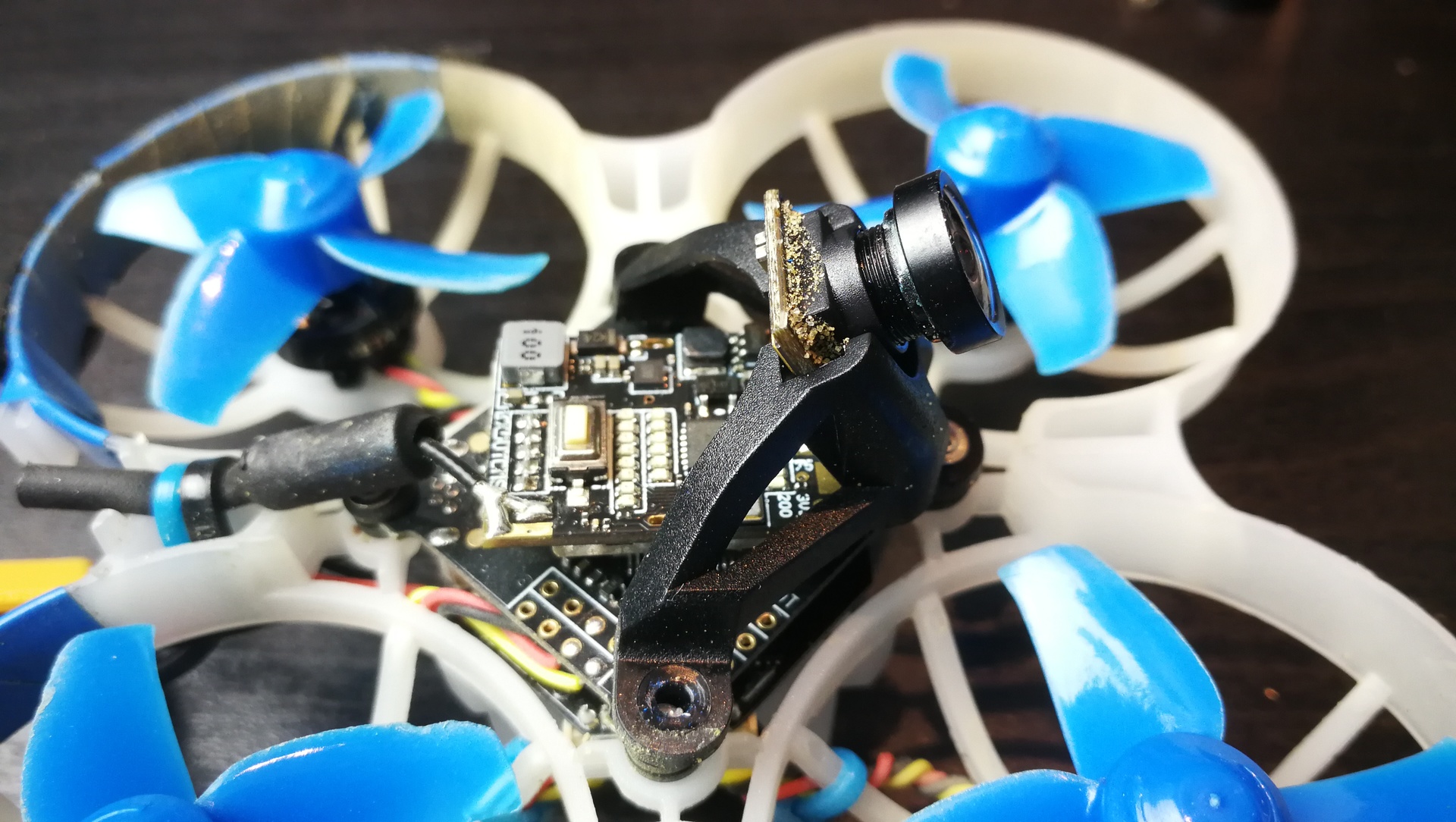
Jak na przerośniętego TinyWhoopa przystało, demontaż Bety 75X nie jest zbyt trudny. Kadłub trzymają dwie śrubki po bokach. Wchodzą one w samą ramę trzymając jednocześnie również kontroler lotu. Pod spodem znajdziemy nadajnik FPV oraz kamerę w gumowym, elastycznym mocowaniu. Jest to element ewolucji tego modelu, ponieważ pierwsze wersje miały sztywny uchwyt, który pękał przy uderzeniach. W tej iteracji BetaFPV zmieniło go na elastyczny.
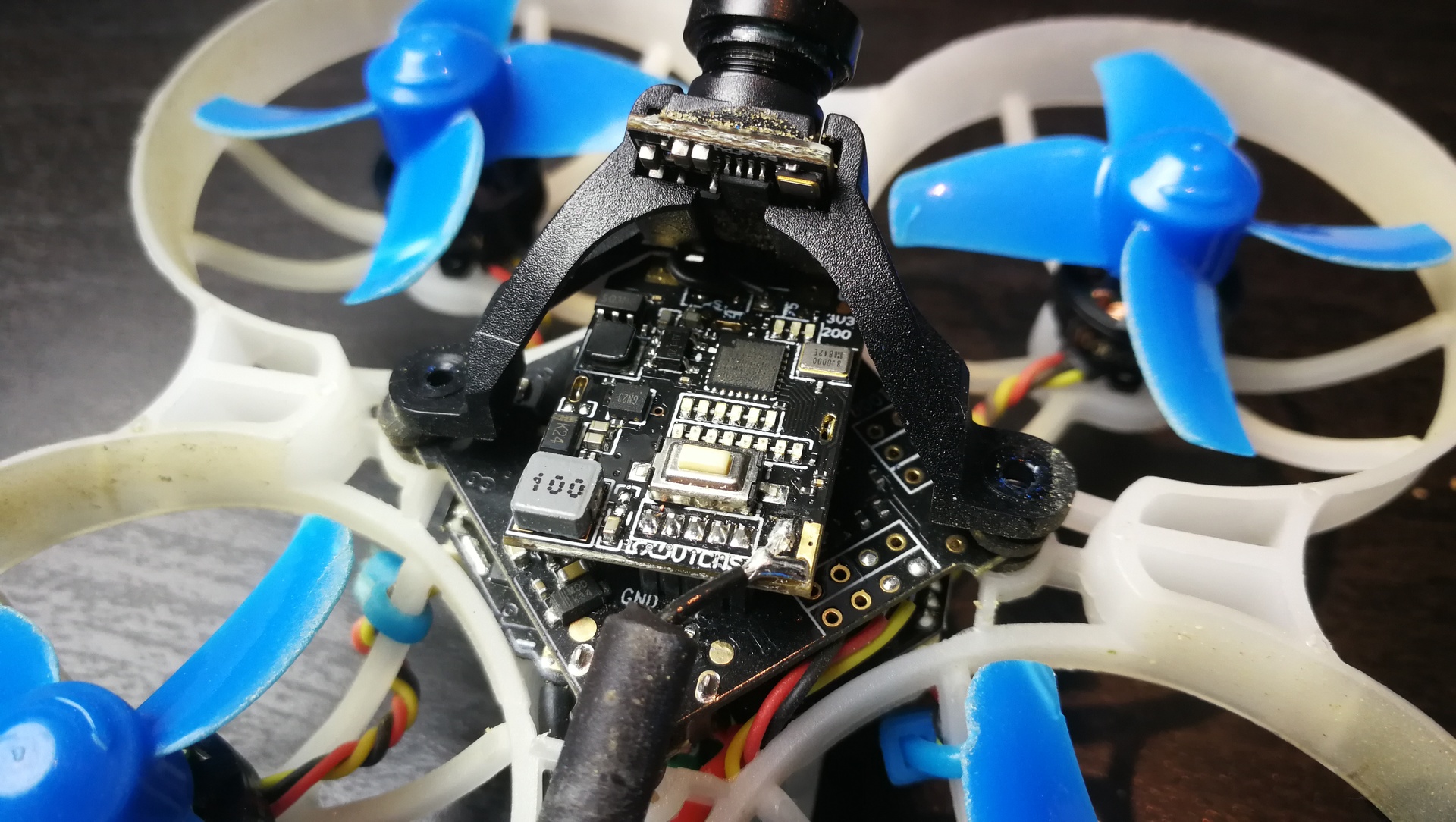
Nadajnik z kamerą to model Z02 z oferty producenta. Można w nim zmieniać moc pomiędzy 25mW, a 200mW. Ta ostatnia wartość w tak małym kopterze zapewni naprawdę przyzwoity zasięg sygnału FPV. Antena dipolowa została przylutowana bezpośrednio do płytki, co oszczędza nieco wagę, ale nieco trudniej byłoby ją wymienić. Na wierzchu znajdziemy 2 rzędy diod oraz całkiem solidny przycisk. Oczywiście pozwala on na zmianę kanału (ang. channel) oraz pasma (ang. band). Diody pokazują wybraną opcję, W górnym rzędzie mamy 6 odpowiadających kolejnym pasmom: A, B, E, F, RaceBand oraz Low-Band. To ostatnie jest poza pasmem ISM 5.8GHz i nie możemy zgodnie z prawem z niego korzystać. W rzędzie poniżej mamy 8 diod odpowiadających 8 kanałom w każdym paśmie. Nadajnik jest wyposażony w SmartAudio, czyli możliwość ustawiania kanałów, pasma i mocy poprzez kontroler lotu. W Betaflight robimy to poprzez menu w OSD, z użyciem manipulatorów i obrazu w goglach. Przypominam, że SmartAudio ma pierwszeństwo przed ustawieniami poprzez przycisk, dlatego jeśli zauważymy, że mimo zmiany, po odłączeniu baterii mamy zupełnie inne ustawienie, to znaczy, że SmartAudio działa i powinniśmy to ustawiać poprzez OSD. Oczywiście jest to dużo łatwiejsze, ponieważ przycisk schowany jest normalnie pod kadłubem, co utrudnia zmianę kanału, gdyby takowa była konieczna.
Kamera według producenta ma kąt widzenia oscylujący w granicach 100-120 stopni. Jak zobaczycie na nagraniu, pozwala to na całkiem swobodne manewrowanie pomiędzy przeszkodami, ponieważ sporo widzimy dookoła. Jak wspomniałem, kamera osadzona jest na elastycznym mocowaniu, które przy uderzeniu nie pęka. Trzyma się ono na 3 śrubkach. Dwie z nich trzymały boki kadłuba. Przednia daje dodatkowe podparcie i aby dostać się do kontrolera lotu i tak musimy ją odkręcić.
Nadajnik jest połączony z kamerą paroma przewodami, które po stronie tej ostatniej są zabezpieczone dodatkowo warstwą epoksydu. Wcześniejsze wersje tej kamery miały sztywne łączenie z kamerą, co niestety wyginało się i pękało. Tutaj, w połączeniu z elastycznym mocowaniem mamy wyjątkowo wytrzymały zestaw.
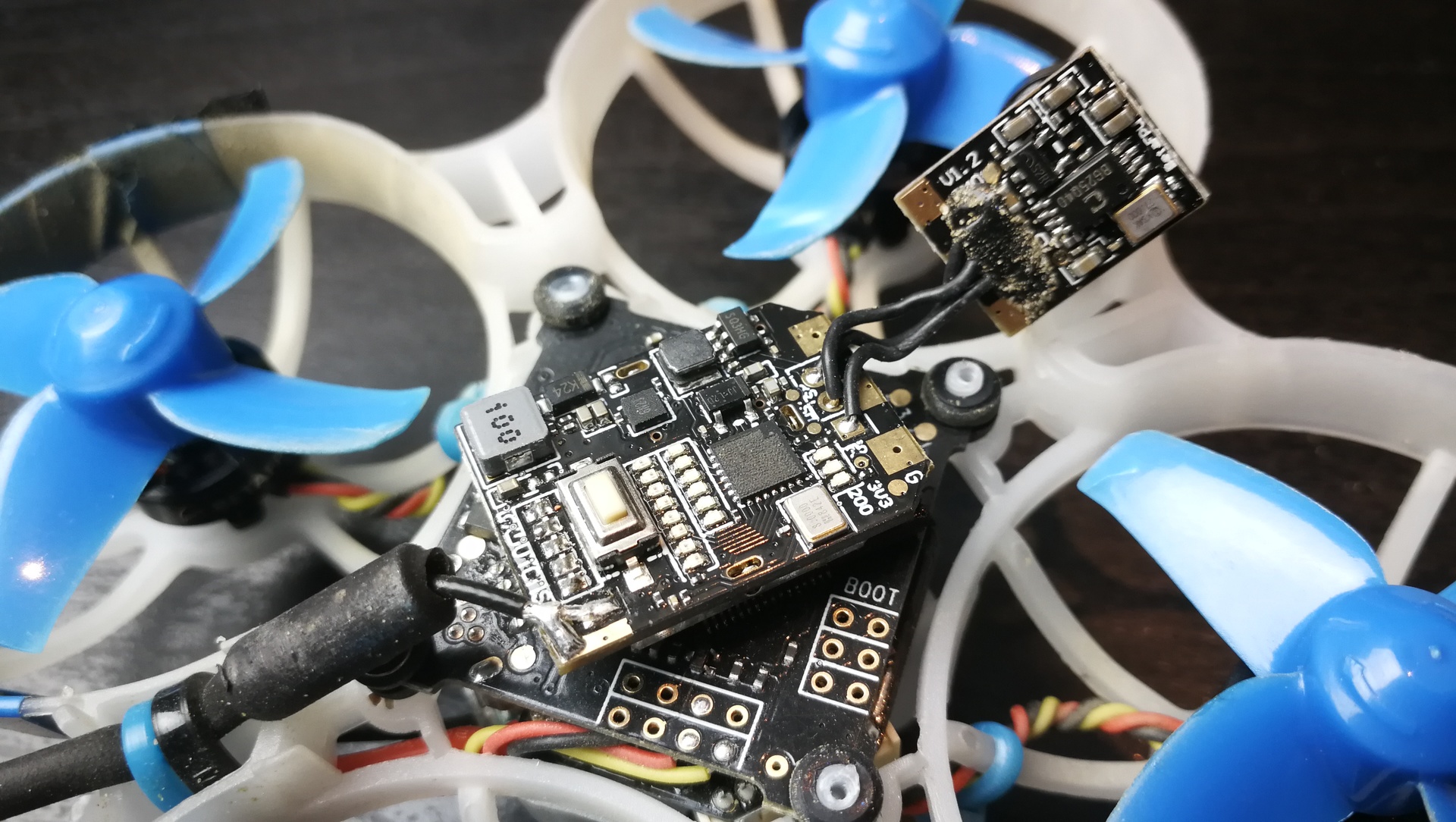
Od spodu nadajnika znajduje się blaszka, która ekranuje i ma odprowadzać zapewne ciepło. Pomiędzy obydwoma elementami znajduje się fragment piankowej taśmy, która ma dawać oparcie, ponieważ w przeciwnym razie nadajnik trzymałby się wyłącznie na pinach z tyłu, a to stwarzałoby ryzyko ich wygięcia i połamania. Sam kontroler lotu ma standardowy rozmiar, jak w pozostałych whoopach, jest odwrócony o 45 stopni i zamocowany na gumkach, które izolują go od wibracji. Trzy śrubki już odkręciliśmy (z przodu i z boków), ponieważ trzymały mocowanie kamery. Pozostała tylna. Po jej odkręceniu musimy delikatnie wyciągnąć kontroler lotu. Należy podważać z przodu i z tyłu, ponieważ tam wlutowane są piny, które wchodzą w gniazda w ESC. Gniazdo jest z przodu i z tyłu, więc należy uważać, aby nie wyłamać ich przy demontażu.
Kontroler lotu bazuje na procesorze F4, który ma większą moc obliczeniową i więcej pamięci, niż poprzednik - F3. Z uwagi na to, można wymusić na żyroskopie i pętli PID pracę z częstotliwościami 8kHz/8kHz i swobodne włączenie dynamicznych filtrów. O ile w tej chwili nie widać wyraźnych zysków w porównaniu z Mobulą to jest to bardziej przyszłościowe rozwiązanie z uwagi na to, że kod Betaflight przestał się mieścić w pamięci kontrolerów lotu bazujących na F3, więc nowsze wersje wychodzą, ale są nieco okrojone. Oczywiście to nie oznacza zmierzchu F3 jeszcze teraz, ale faktycznie F4 może nam umożliwić włączenie kolejnych, nowych funkcji w późniejszych wydaniach.
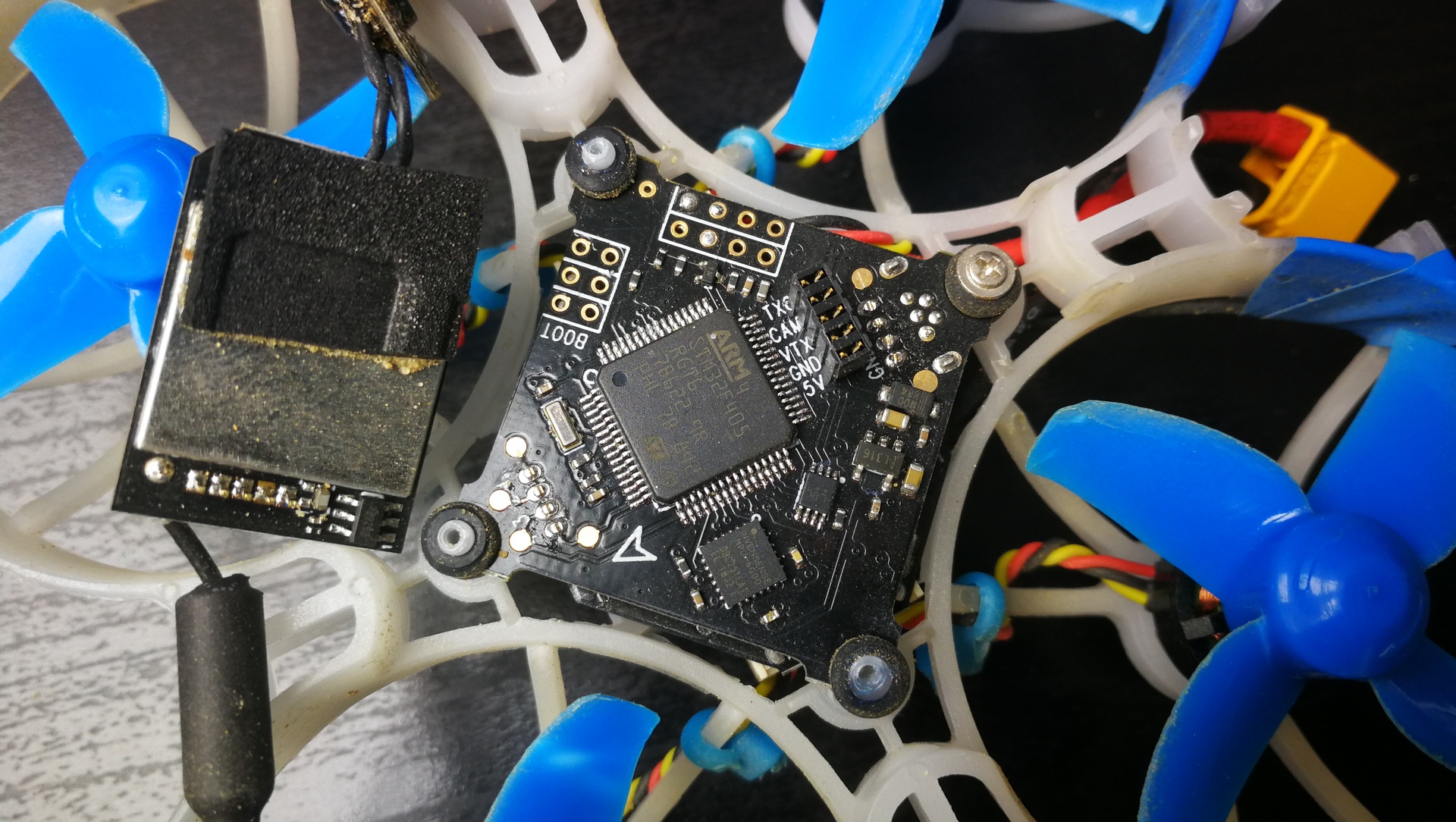
Pod spodem znajdziemy oczywiście moduł MAX7456, który odpowiada za OSD. Pamiętajmy, aby podnosząc kontroler lotu pamiętać o poluzowaniu odbiornika, którego przewody mogą trzymać płytkę. Po odwróceniu FC zobaczymy też miejsce przylutowania przewodów od XM+. Jeżeli macie płytkę w wersji 1.1 albo 1.2 (napisane jest poniżej napisu BetaFPV) to macie możliwość przylutowania Buzzera (miniaturowego głośniczka, który będzie piszczał przy słabej baterii, albo wyzwolony z aparatury, gdy zgubimy kopter w krzakach) oraz listwy LED, która zapewni dodatkowe oświetlenie Bety, szczególnie w ciemności. Schematy połączenia są na stronach BetaFPV: (https://betafpv.com/collections/flight-controller-1/products/f4-2s-brushless-flight-controller-and-esc oraz https://betafpv.com/collections/accessories/products/betafpv-led-board-2pcs). Jak to wygląda po podłączeniu, pokazuję w dalszej części recenzji. Zwracam tutaj uwagę, że Mobula 7 miała w komplecie przynajmniej Buzzer, choć LEDy też trzeba było dokupić osobno. Obecnie, z tego co wiem, Beta75X jest sprzedawana w komplecie z diodami, ale brzęczyk wciąż musimy przylutować sami.
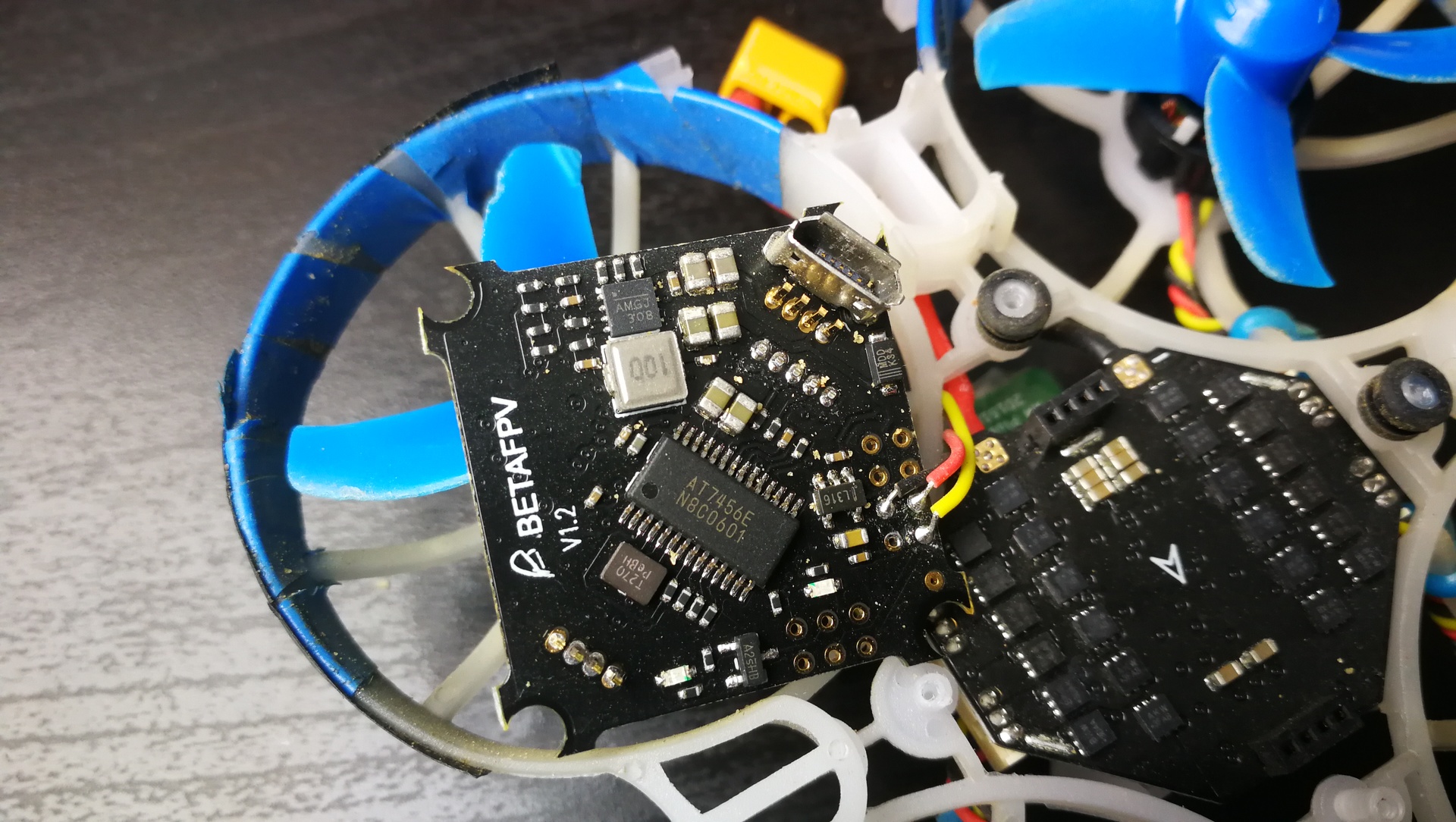
Z uwagi na rozmieszczenie gniazd do silników, ESC też ma swój kierunek mocowania określony strzałką. Jednym gniazdem podawany jest sygnał sterujący wszystkimi 4 ESC, zaś drugim zasilanie i masa. Obawiam się, że zamiana kierunków (płytka jest symetryczna), mogłoby nas kosztować wymianę jednej, albo obu płytek, więc polecam na to uważać.
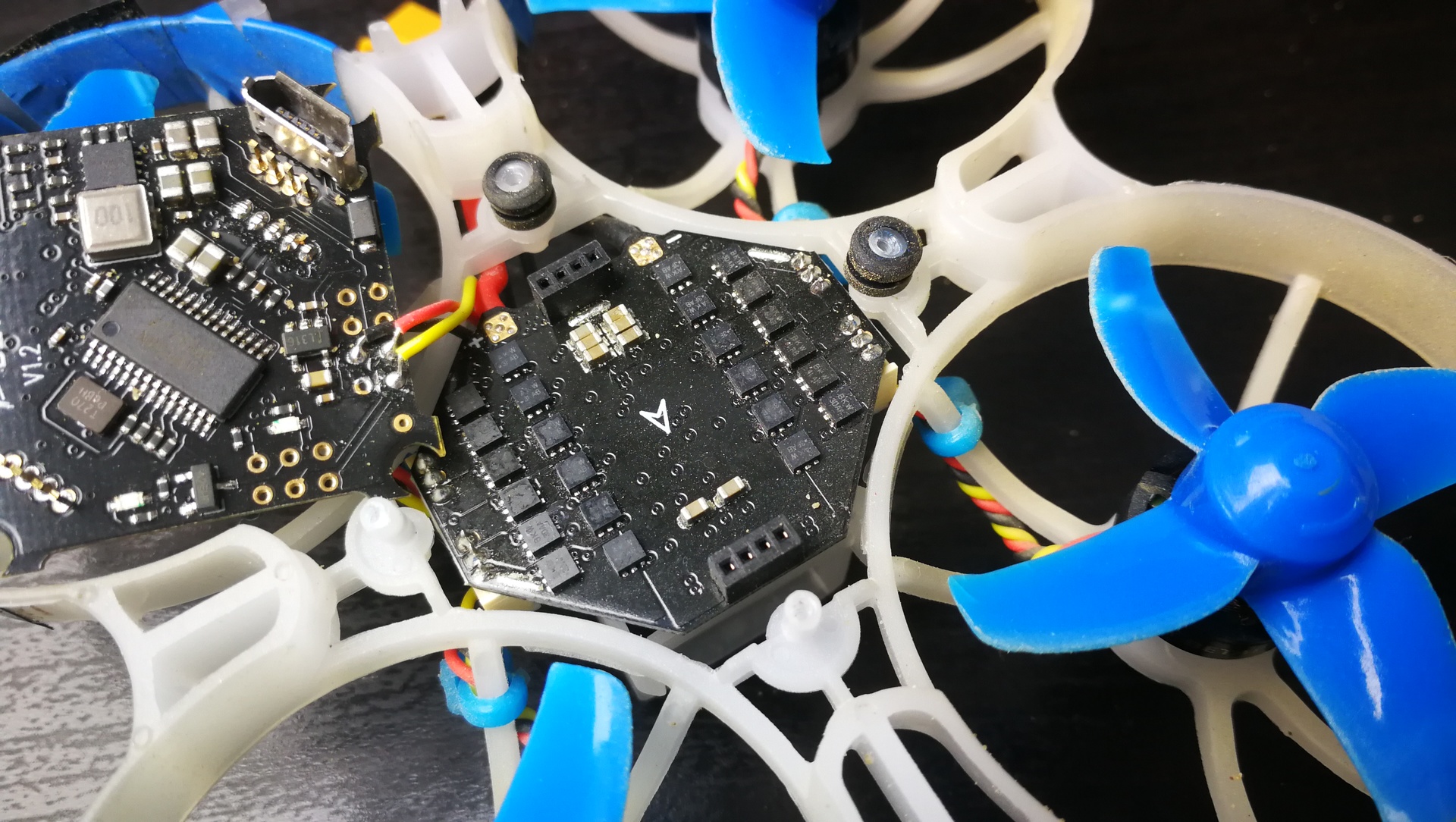
ESC 4w1 jest schowane w wycięciu w ramie i nie ma żadnego dodatkowego mocowania. Po prostu opiera się na koszyczku pod którym znajduje się odbiornik, a z góry jest trzymany przez kontroler lotu. Wyjmując płytkę z ramy pamiętajmy tylko o przylutowanym przewodzie zasilającym i nie zapomnijmy go wyplątać z wycięcia w ramie.
Przed pierwszym lotem
Nim udałem się na testy Bety 75X, musiałem ją po swojemu poprawić, aby mi dłużej służyła. Pierwszą rzeczą było zamocowanie przewodu zasilającego do ramy, aby podczas podpinania baterii, albo gdyby ta się wysunęła przy uderzeniu, szarpnięcie nie przenosiło się wyłącznie na miejsce lutowania do płytki z ESC, ale siła przeniosła się choć częściowo na sam przewód. W ten sposób redukujemy szansę, że lutowanie w pewnym momencie zmęczeniowo nam puści, ponieważ przenosimy część sił na samą izolację i przewód.
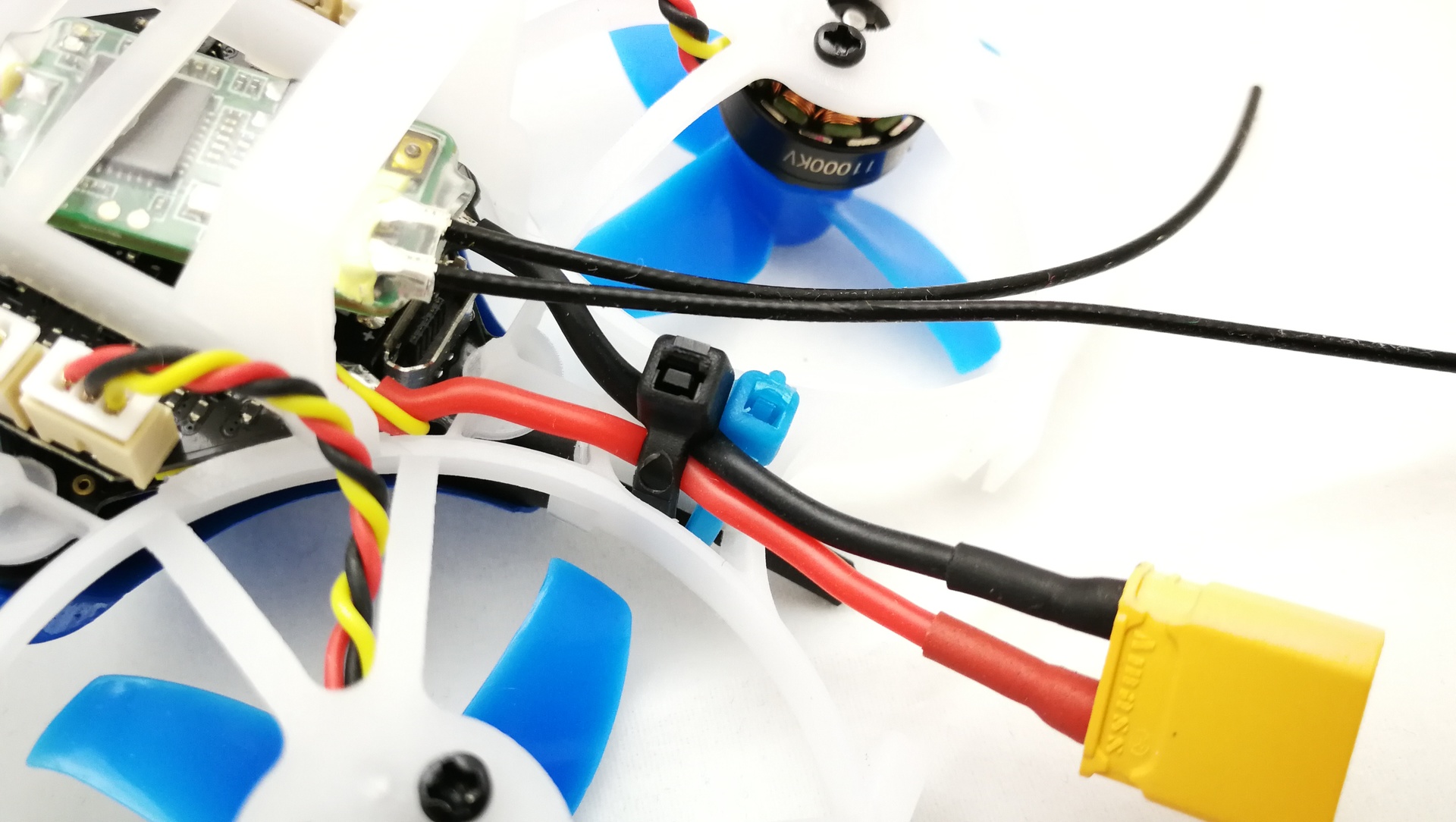
Oczywiście to samo należało zrobić z anteną od nadajnika. Aby nie wkręciła się w śmigła, zamocowałem ją, podobniej jak przewód zasilający, opaską zaciskową (tzw. "trytytką"). Beta 75X ma na szczęście sporo wycięć w ramie, które obniżają masę całości, ale przy okazji pozwalają zahaczyć różne elementy. Końcówka anteny jest częścią aktywną, więc nie możemy jej ścisnąć zbyt mocno, aby nie pękła. Znajduje się ona w termokurczce, a więc to głównie wokół niej zaciśnie się plastik, ale i tak chodzi nam wyłącznie o to, aby antena nie przesunęła się w okolice pracujących śmigieł.

Z kolei przewody od silników przypiąłem do samej ramy opaskami zaciskowymi. W tym momencie na pewno podniosą się głosy mówiące o tym, że opaski na pewno poprzecinają kable i w ogóle będzie katastrofa. Tak, faktycznie opaski mogą być ostre na krawędziach, dlatego nie zaciskałem ich z całej siły, a o ile nie będą się co chwila przemieszczać, tylko złapią za izolację, kopter powinien trochę polatać bezawaryjnie. Z mojej perspektywy lepiej tak, niż dać im wisieć zupełnie luźno, ponieważ podczas lądowania gdzieś w krzakach, przewód może się zahaczyć o gałąź, a potem dać wyrwać. Wolę mieć go więc bliżej ramy.
I wreszcie anteny od odbiornika XM+. Są one długie i jak wspomniałem wcześniej, wystają luźno z tyłu, więc aby nie wkręciły się w śmigła, puściłem je wzdłuż tylnych osłon, po zewnętrznej krawędzi. Okleiłem je następnie taśmą izolacyjną, aby całość się trzymała i była zabezpieczona przed uszkodzeniami mechanicznymi.

Ostatecznie wyszło to mniej zjawiskowo, niż się spodziewałem, ale nauczyłem się, że w przypadku kopterów - "niezawodnie" jest ważniejsze od "estetycznie", choć miło, jak jedno z drugim idzie oczywiście w parze. Alternatywą jest wydrukowanie uchwytu, który zamiast diod LED będzie trzymał anteny i buzzer (np. taki).

Ostatnim zabiegiem było zamocowanie LEDów i buzzera. Na szczęście na stronie BetaFPV są odpowiednie schematy ich podłączania, o czym pisałem wcześniej. Co prawda producent wyprodukował już odpowiedni moduł, ale ja użyłem tego, co miałem w domu, czyli kwadratowej płytki z 4 LEDami na 5V, którą kiedyś kupiłem. Aby ją zamocować, musiałem zaprojektować i wydrukować prosty element, który wchodził w mocowanie z tyłu koptera. Znajdziecie go na Thingiverse: https://www.thingiverse.com/thing:3481760. Umieściłem tam też odnośniki do samych LEDów, które możemy kupić również w Polskich sklepach.
LEDy podłączamy 3 przewodami, czyli 2 zasilające (5V i GND), zaś sygnał idzie 3-cim. Pamiętajcie o tym, że diody WS2818 mają z jednej strony wejście (DIN), z drugiej wyjście (DOUT). Zadziałają wyłącznie, gdy podamy sygnał na tym pierwszym pinie, czyli wejściowym.

Buzzer umieściłem za diodami, a wszystkie przewody przypiąłem na nowo opaskami. Całość trzyma się stabilnie i daje dokładnie taki efekt, jakiego oczekiwałem.
Efekt finalny mojego dłubania prezentuje się w ten sposób:
W powietrzu
Warto wiedzieć
W trakcie intensywniejszego latania Betą 75X i ostrzejszych manewrów, a także akrobacji pojawia się tzw. washout, czyli niekontrolowane szarpnięcie w jedną ze stron, wynikające z reakcji kontrolera lotu na dość swobodne opadanie i duży przepływ powietrza wokół koptera. Z uwagi na to, że śmigła kręcą się odwrotnie niż zwykle (Props Out), dron podobno zachowuje lepszą stabilność na łukach i przy zwrotach, ale w zamian potrafi miotać nim podczas nurkowania (ang. dive), czy Split-S, czyli zawracaniu z jednoczesnym przewrotem. Pojawiło się bardzo rzetelne opracowanie i lista ustawień, które należy zmienić, aby znacząco poprawić charakterystykę lotu. W dokumencie omówione są wszystkie zmiany ustawień, a dodatkowo podana jest lista komend, które można wkleić do CLI i w ten sposób przyjąć gotowy zestawu opcji polecanych przez autora.
https://docs.google.com/document/d/1xlaGtkMGJUP1UwcJw1xqIG9TCuA0a7NtbvzOQrsN7hM/edit
Dodatkowo można zmienić ustawienia samych ESC poprzez BLHeli Configurator, co wg. opracowania również powinno pomóc. Przypominam, że do przeprogramowania ESC musimy odłaczyć kopter od Betaflight, uruchomić konfigurator BLHeli, a następnie podłączyć baterię, co sprawi, że regulatory będą zasilane i pozwoli to na wyciągnięcie z nich bieżących ustawień i zapisanie nowych.
Modyfikacje
Beta 75X ma spory zapas mocy i pozwala na naprawdę finezyjne modyfikacje. Po pierwsze z użyciem drukarki 3D możemy stworzyć mocowanie do bardzo wielu kamer, w tym popularnych HD + FPV takich jak Caddx Turtle, czy Runcam Split. Nie brakuje też oczywiście uchwytów dla kamer od BetaFPV pochylonych pod innym kątem, niż oryginalny. Są także kadłuby, uchwyty do buzzera, czy samych anten. Jest nawet rozwiązanie trzymające antenę od nadajnika nieco bardziej na sztorc, aby była ona dalej od śmigieł i ustawiona bardziej w pionie podczas lotu, poprawiając teoretycznie zasięg i jakość sygnału płynącego z nadajnika.
Projekty dla drukarek 3D dla kopterów od BetaFPV: https://www.thingiverse.com/search?q=betafpv
Podsumowanie
Beta 75X to bardzo porządny kopter, wykonany z należytą starannością, na dobrych komponentach. Różnica w cenie pomiędzy nim, a Mobulą 7 bierze się z solidniejszych silników, nieco lepszej kamery, kontrolera lotu na procesorze F4 (zamiast F3), czy zasilania poprzez złącze XT-30. Kopter lata również stabilniej, niż jego odpowiednik od HappyModel, zapewne częściowo z uwagi na nieco większą masę. Należy jednak pamiętać, że na fabrycznych ustawieniach możemy doświadczyć momentami szarpnięć z jednej ze stron, które są spowodowane m.in. akumulacją wartości I (ang. I-Term buildup) w kontrolerze PID. Polecam więc zastosować opisane wcześniej zmiany - najlepiej poprzez wklejenie ich kompletu do linii komend Betaflight (CLI) i wpisanie "save" na końcu. W moim przypadku nie rozwiązało to całkowicie problemu, ale w tak małym kopterze mogą się też liczyć umiejętności lotu i odpowiednio wczesne korygowanie po niektórych manewrach.
Uważam, że jeśli chcecie dołożyć do solidniejszych komponentów to Beta 75X pozostaje dobrym wyborem, natomiast jeśli Wasz budżet jest ograniczony, Mobula 7 również zapewni Wam dobrą zabawę, choć jest nieco mniej przyszłościowa m.in. z uwagi na starszy procesor na kontrolerze lotu.
Rejestrując się w sklepie BetaFPV z użyciem tego linku otrzymacie kupon na 10% zniżki na przyszłe zakupy: http://bit.ly/4SmiglaBetaFpv.
Sam kopter kupicie tutaj: https://betafpv.com/products/beta75x-2s-whoop-quadcopter
Ocena 4Śmigła.pl: 4.5 / 5.0 ![]()
![]()
![]()
![]()
![]()
{kind=link}