[źródło: Instrukcja Kiss V2 Flyduino]
Kiedy składamy kopter, wielokrotnie będziemy pytać samych siebie, jak właściwie połączyć poszczególne elementy ze sobą. Każdy kontroler lotu ma inny układ pól lutowniczych, czy gniazd i ustalenie, skąd zasilić nadajnik FPV, albo gdzie jest wyjście sygnału z OSD wcale nie jest takie proste. Dziś zdradzę Wam magiczne zaklęcie, dzięki któremu wujek Google zaprezentuje Wam schematy Waszej płytki lub dowolnego elementu takiego jak odbiornik, czy kamera. Zapraszam!
Oczywiście nie będę owijał w bawełnę - hasłem na dziś jest: "pinout". Powiedzmy, że szukamy schematu wyjść dla kontrolera lotu Kakute F4 V2. Spróbujmy więc z hasłem: "kakute f4 v2 pinout". Warto po wyszukiwaniu przejść do zakładki "Grafika".
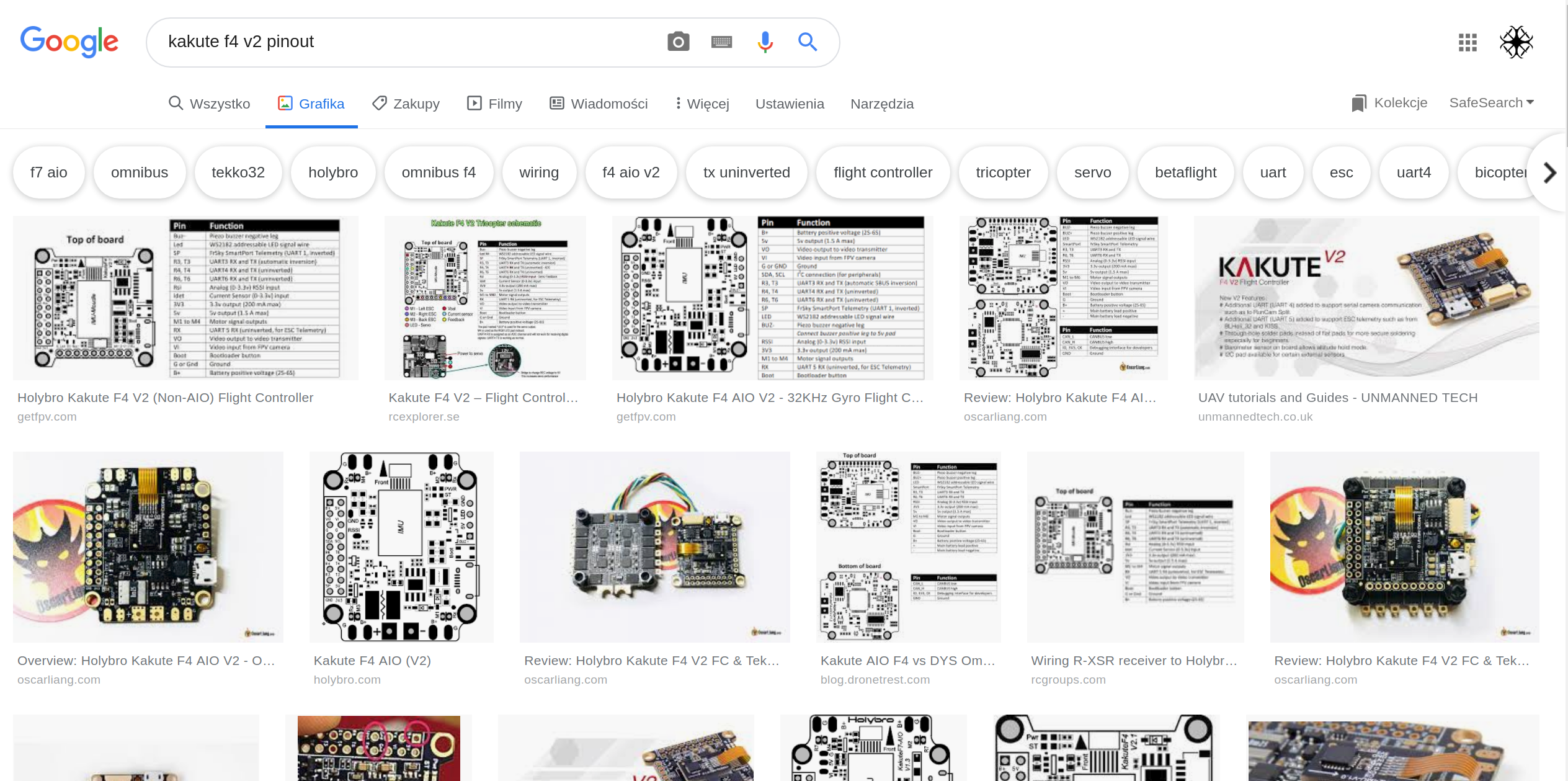
Bardzo szybko trafiamy na schematy z opisem wszystkich wyjść. Zwróćmy jednak uwagę, że część wyników dotyczy Kakute F4 AIO (płytki z dodatkowymi polami lutowniczymi dla ESC i zasilania). Tym niemniej, dwa pierwsze wyniki dają nam to, czego szukamy.
Idźmy dalej. Do Kakute F4 V2 próbuję podłączyć odbiornik FrSky XM+, ale nie ma on opisanych pinów, a ja nigdy nie pamiętam ich kolejności. Sprawdźmy więc: "frsky xm+ pinout".
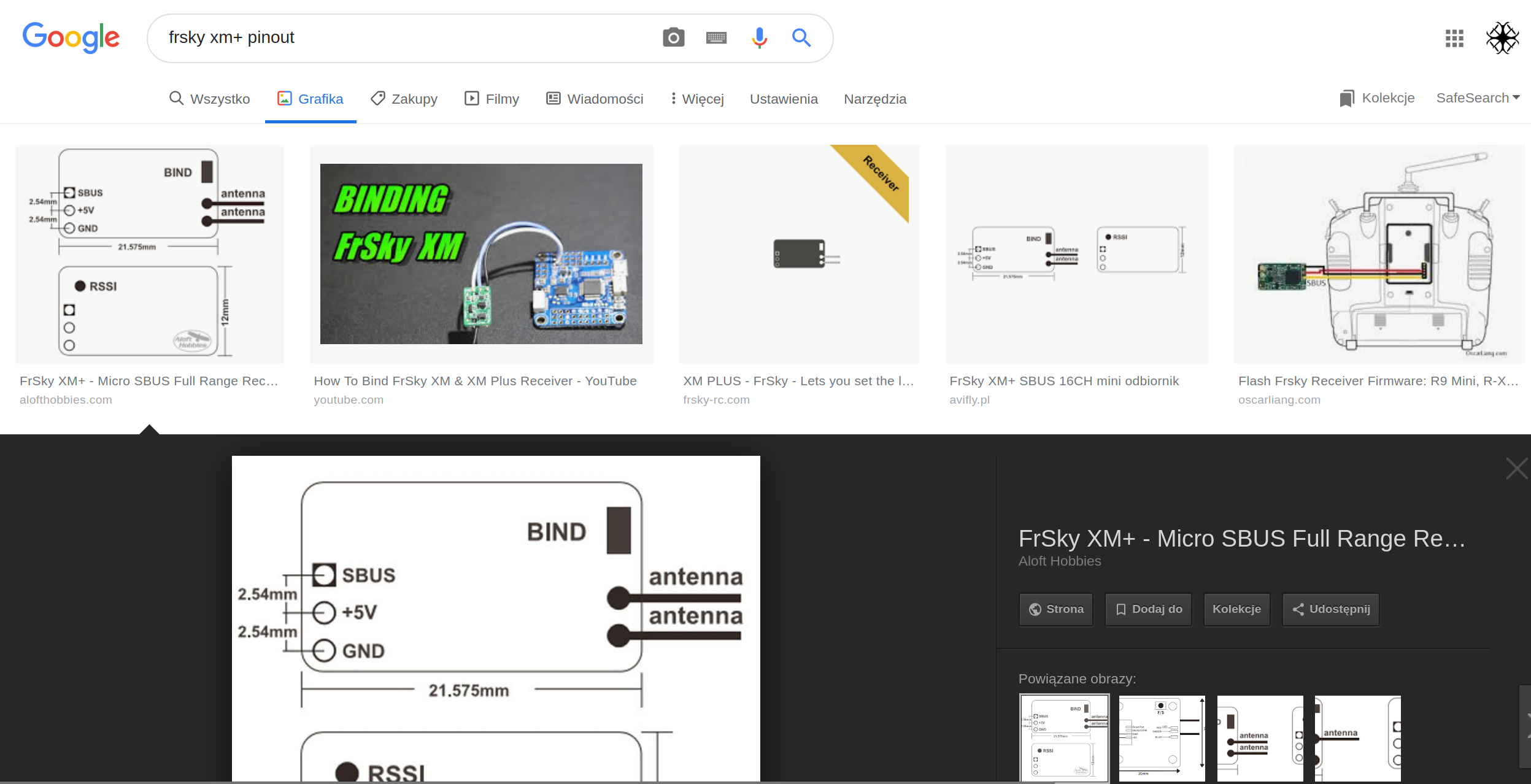
Jak widać, bez problemu znajdujemy schemat połączeń dla tego odbiornika, i już wiadomo, gdzie jest SBUS, a gdzie uziemienie (GND). Nim połączymy Kakute F4 V2 z regulatorem obrotów 4w1, warto sprawdzić, czy kolejność przewodów i ich liczba zgadza się zarówno po stronie kontrolera lotu, jak i samego ESC. Spróbujmy więc hasło: "tekko32 4in1 pinout".
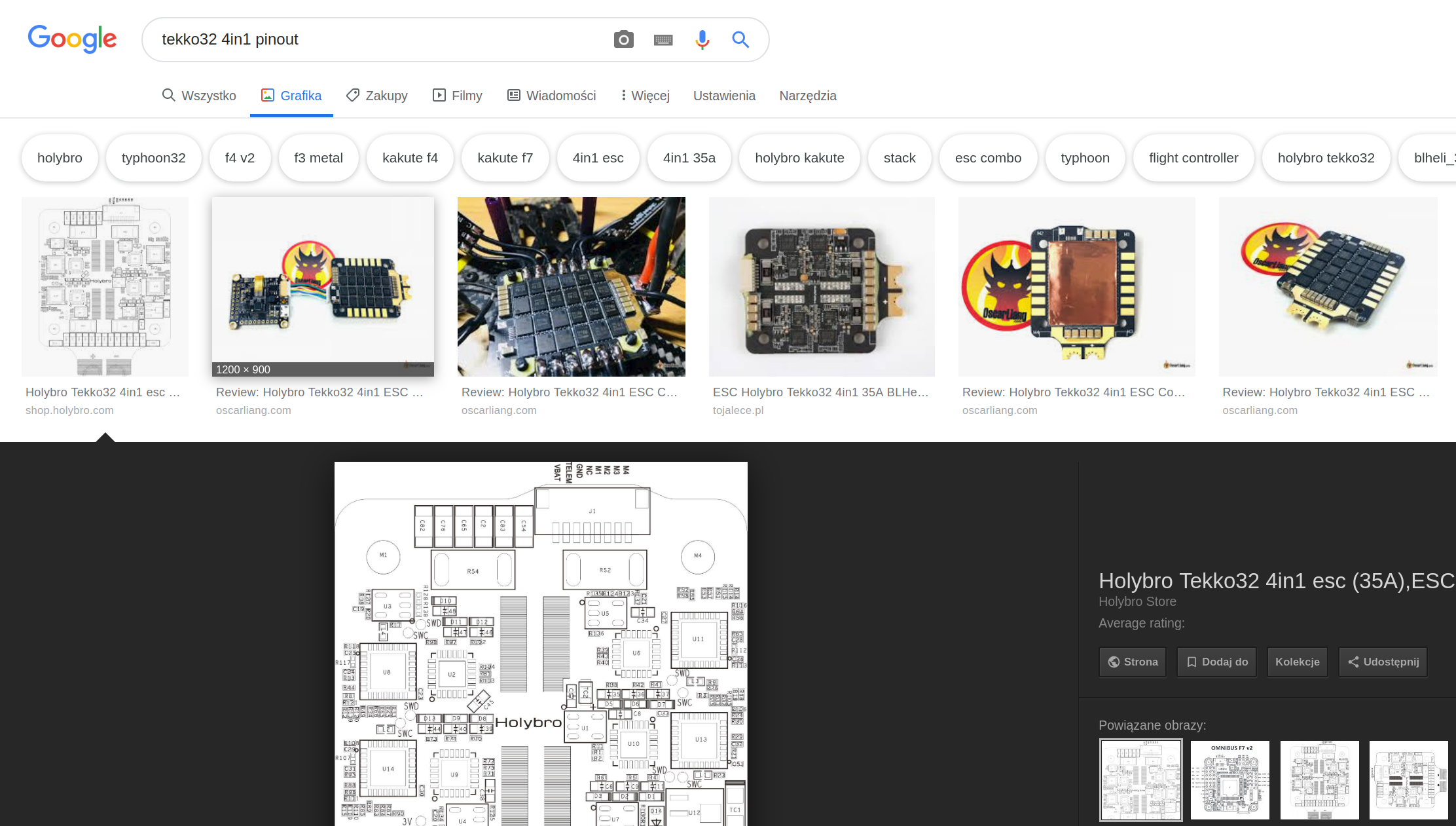
Pierwsza z grafik pokazuje nam od razu schemat całej płytki wraz z opisami kolejnych wyjść w gnieździe. Łącząc to z grafiką pokazującą Kakute F4 V2 mamy doskonałe źródło wiedzy potrzebnej nam do zweryfikowania połączeń z kopterem. Alternatywnym hasłem, które może nam pomóc jest "wiring diagram" albo samo hasło "wiring", czyli po polsku - "schemat połaczeń". W przypadku GPSu, który też niedawno podłączałem, możemy próbować i w ten sposób: "hglrc gpn m8n wiring".
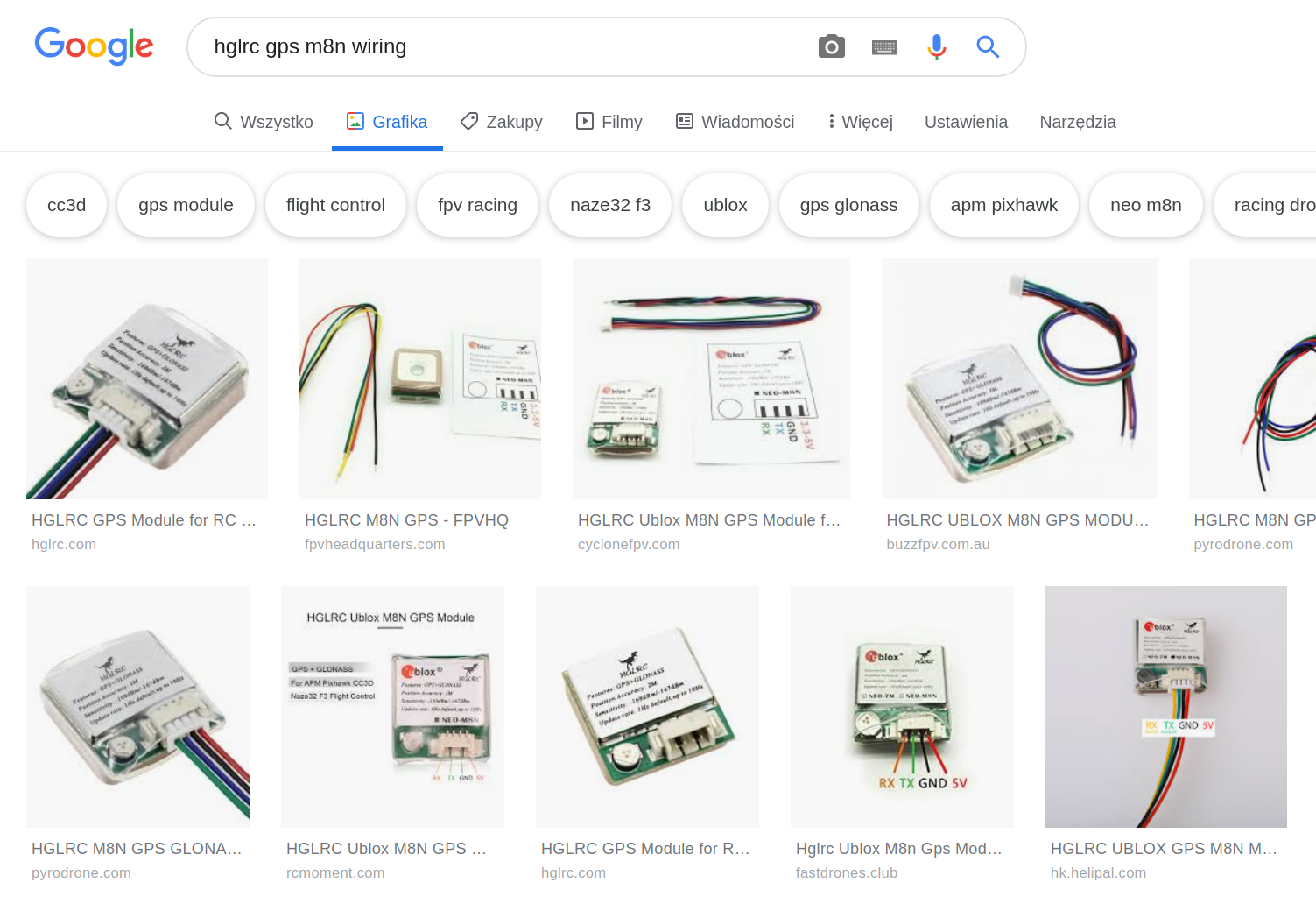
W większości wyników widzimy od razu opis poszczególnych przewodów we wtyczce, więc już mamy pewność, który z pinów to RX, a który TX. Przy okazji pamiętajmy o tym, że w przypadku tego typu połączeń, TX (np. z GPSu) lutujemy do RX na kontrolerze lotu i odwrotnie. RX z GPS do TX na kontrolerze. Pojawi się to też we wpisie dotyczącym UART, a póki co pamiętajcie, że łączymy na krzyż i będzie dobrze :)
Mam nadzieję, że ten wpis przyspieszy Wam znalezienie odpowiedzi - "jak mam podłączyć X do Y?". Oczywiście zawsze można poszukać instrukcji od producenta: "manual" - np. "kakute f4 v2 manual". Podczas składania wspomagam się jednak często samym smartfonem i łatwiej jest mi znaleźć grafikę w Google, niż pobierać PDF.
Życzę Wam udanych lotów i owocnego składania!
{kind=link}