Skończyliśmy na przylutowaniu wszystkich przewodów do kontrolera lotu. Masę dyndających wtyczek musimy teraz powoli popodłączać do poszczególnych komponentów i zobaczyć, czy wszystko działa. Powoli docieramy do fazy, w której cały kopter będziemy "zamykać", a więc zajmować się rozmieszczeniem elementów wewnątrz i prowadzeniem anten i przewodów. Do roboty!
Zacznijmy od montażu kamery. Są 3 standardy rozmiarowe: standard, mini i micro. Mają one różną szerokość i wymiary, ale podstawowy z nich to szerokość kamery. Standard to 28mm (duże kamery np. HS1177), następnie mini (21mm) i micro, czyli 19mm. Na ogół rozmiar jest podany w samym opisie produktu. Daleko nie szukając: kamera Runcam Micro Swift 2, czy Foxeer Falkor Mini (lub micro). Ja mam tego ostatniego. Wraz z kamerą otrzymałem ramkę - adapter do zmiany rozmiaru. Jak już wspomniałem, używam Foxeer Falkor Mini. Rama spodziewa się kamery w formacie Standard (28mm), więc w ruch poszedł owy adapter. Wkręca się go dwiema śrubkami po jednej i drugiej stronie.


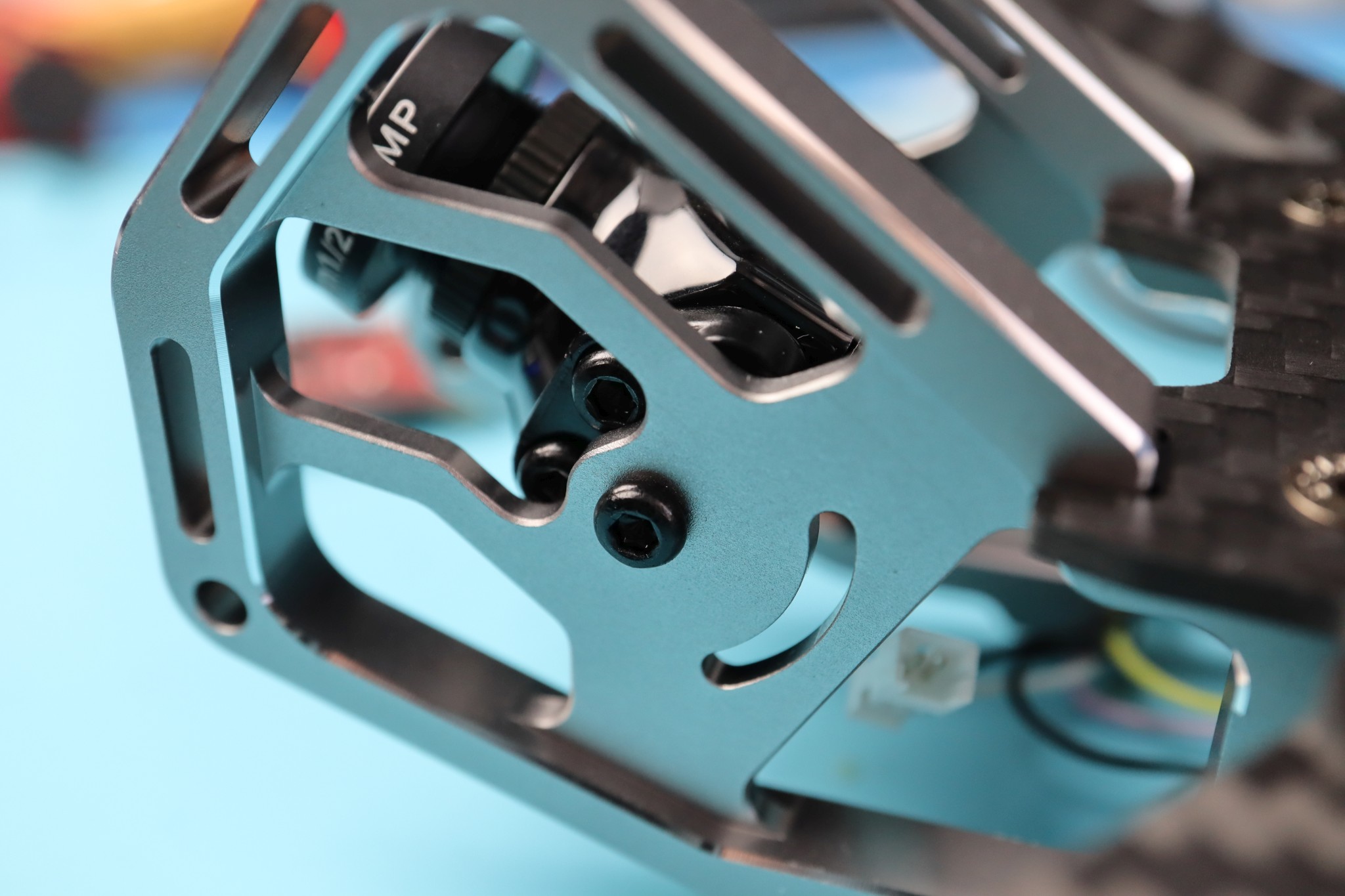
Kamerę musiałem wcisnąć w aluminiową klatkę, która będzie ją zabezpieczała. Zwróćcie uwagę, że w niewielkim stopniu tylko obiektyw jest tak naprawdę zasłonięty. Jeśli uderzę w coś centralnie - jest szansa, że aluminium ochroni kamerę, ale w przeciwnym razie i tak może się okazać, że soczewka będzie do wymiany. Gdyby była to kamera rozmiarów micro (z odpowiednim adapterem - najczęściej z drukarki 3D) to bardziej schowałaby się w środku. W zamian, przy tak szerokim kącie (używam ogniskowej 1.8mm), owa klatka na pewno wchodziłaby mi w kadr i zasłaniała obraz z boku. Cóż - coś za coś.


Z uwagi na to, że kamery mają przeróżne mocowania - producent zdecydował się na dwa wycięcia montażowe. Po bokach są pojedyncze otwory, zaś za nimi dodatkowe łukowate, które stabilizowałoby kamerę i pozwoliło na regulację kąta jej pochylenia. Falkor akurat ma tak rozłożone otwory boczne, że jedynym, co dało się zrobić było wkręcenie śrub w środkowe dziurki. Zaletą dobrej jakości kamery jest to, że otwory mają metalowe gwinty w środku. Nie jest łatwo je wytrzeć i uszkodzić przy mocnym przykręceniu kamery. Producenci często dodają też cienkie gumowe podkładki, które możemy umieścić na śrubie, które dodatkowo będą amortyzowały mocowanie i utrudniały odkręcenie się śrub od wibracji w trakcie lotu. Falkor miał jednak dość krótkie śrubki, więc wkręciłem się bezpośrednio w aluminiową klatkę - powinno wystarczyć.

Dobrze, po zamocowaniu i wstępnym pochyleniu kamery możemy już podłączyć pierwszą wtyczkę. Jest ona asymetryczna, więc sprawdźmy jak układają się otwory i piny. Wtyczki od kamer wchodzą dość ciężko, ale jeśli wciśniecie ją odwrotnie - jest szansa powyginać wszystkie blaszki w gnieździe, a tego nie chcecie. Warto więc sprawdzić.

Jeśli chodzi o kąt pochylenia kamery, szczerze mówiąc, dobieram go na oko, ewentulanie kładąc smartfon z aplikacją "kątomierz" na ramie i pochylaniu koptera szukając mniej więcej, jak nachylony jest obiektyw. Do Freestyle celuję w jakieś 20-25 stopni, ale jeśli zaczynacie - 15 stopni też będzie ok. Do powolnego zapoznania się z kopterem możecie pochylić ją minimalnie, bądź w ogóle - wtedy sterowanie będzie bardziej naturalne. Jeśli jednak macie już doświadczenie w symulatorze - nie warto zwlekać i od razu pójdźcie w jakieś 15-20 stopni. Jeśli będzie za mało i poczujecie, że kamera patrzy za mocno w ziemię, lub przeszkadza Wam w wykonywaniu ewolucji - odkręcicie częściowo obie śrubki i pochylicie ją bardziej. Warto w tym celu mieć ze sobą klucz imbusowy odpowiedniego rozmiaru (na ogół mniejszy niż śruby w ramie), który pozwoli szybko przeprowadzić regulację.

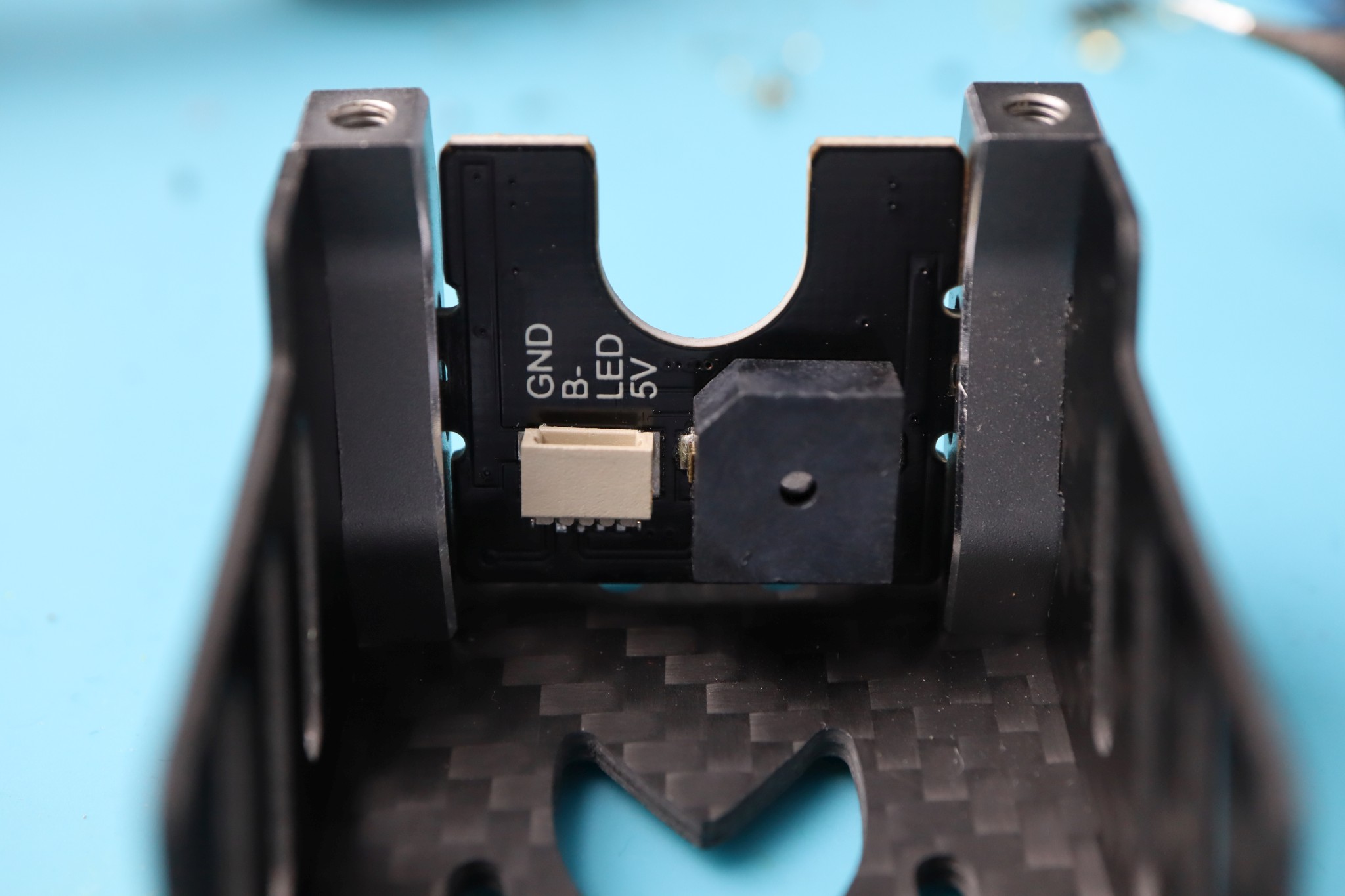
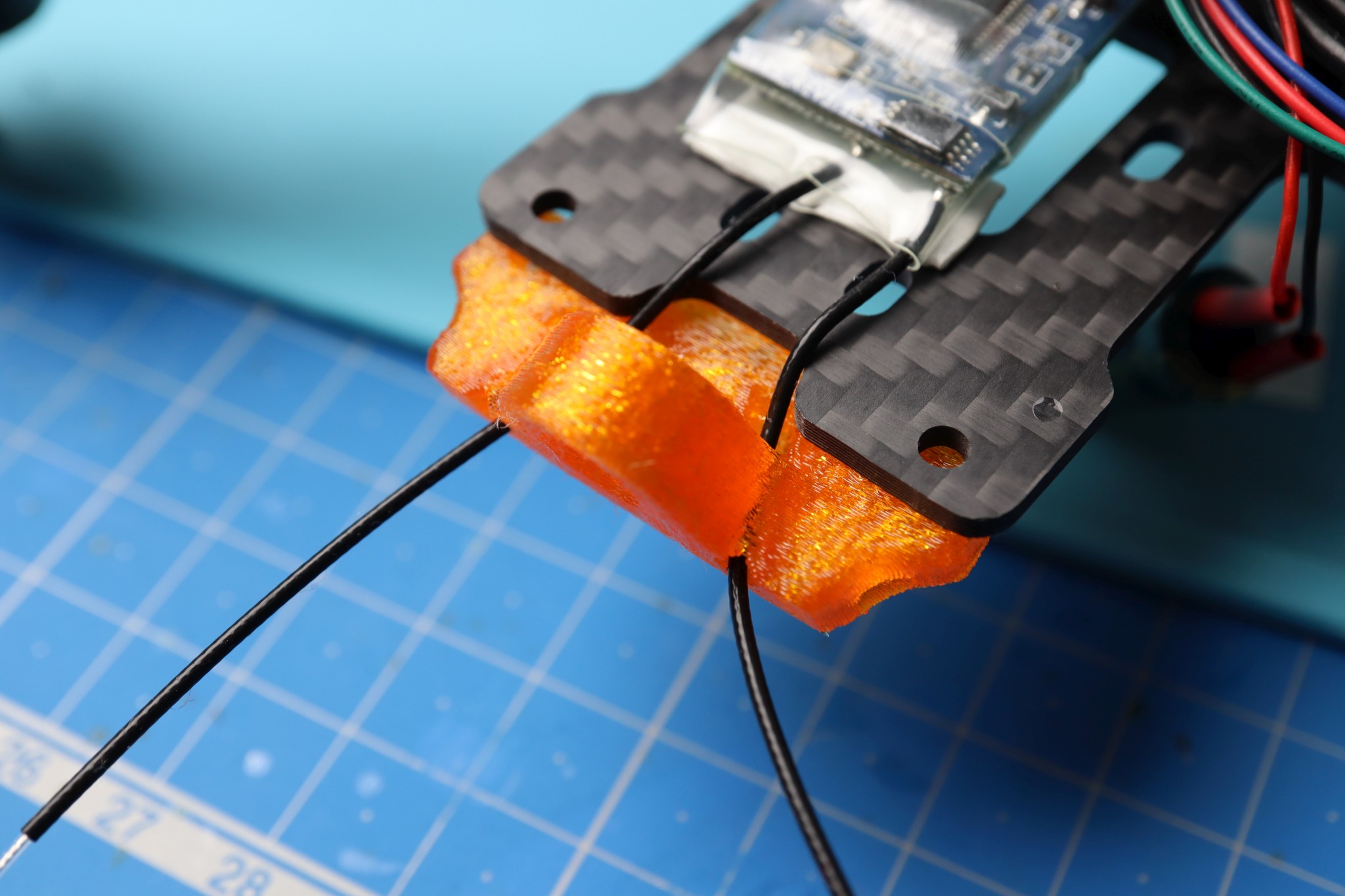
Z tyłu ramy zamontujemy płytkę z LEDami i buzzerem. Jeśli dobrze pamiętam, musiałem wykręcić jeden z aluminiowych słupków, aby móc ten element zamocować. Potrzebujemy go jednak i tak, ponieważ półokrągłe wycięcie pozwoli nam poprowadzić antenę FPV na zewnątrz. Musimy więc od razu wiedzieć, którędy będzie przebiegała i jak ułożyć nadajnik, aby pigtail (krótki przewód pomiędzy anteną, a nadajnikiem - na ogół również przejściówka np. pomiędzy złączem MMCX, a SMA) nie był za mocno wygięty.

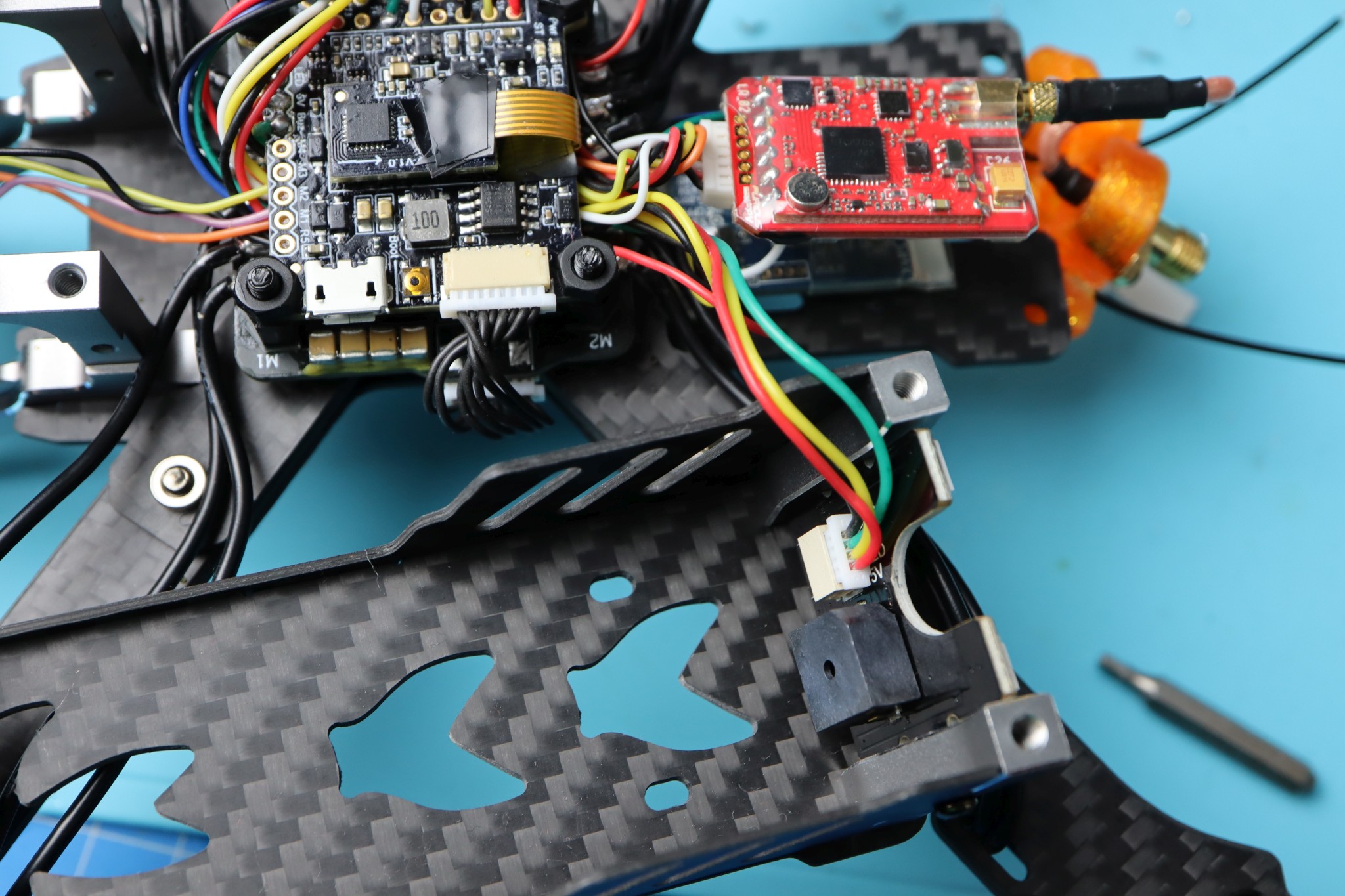
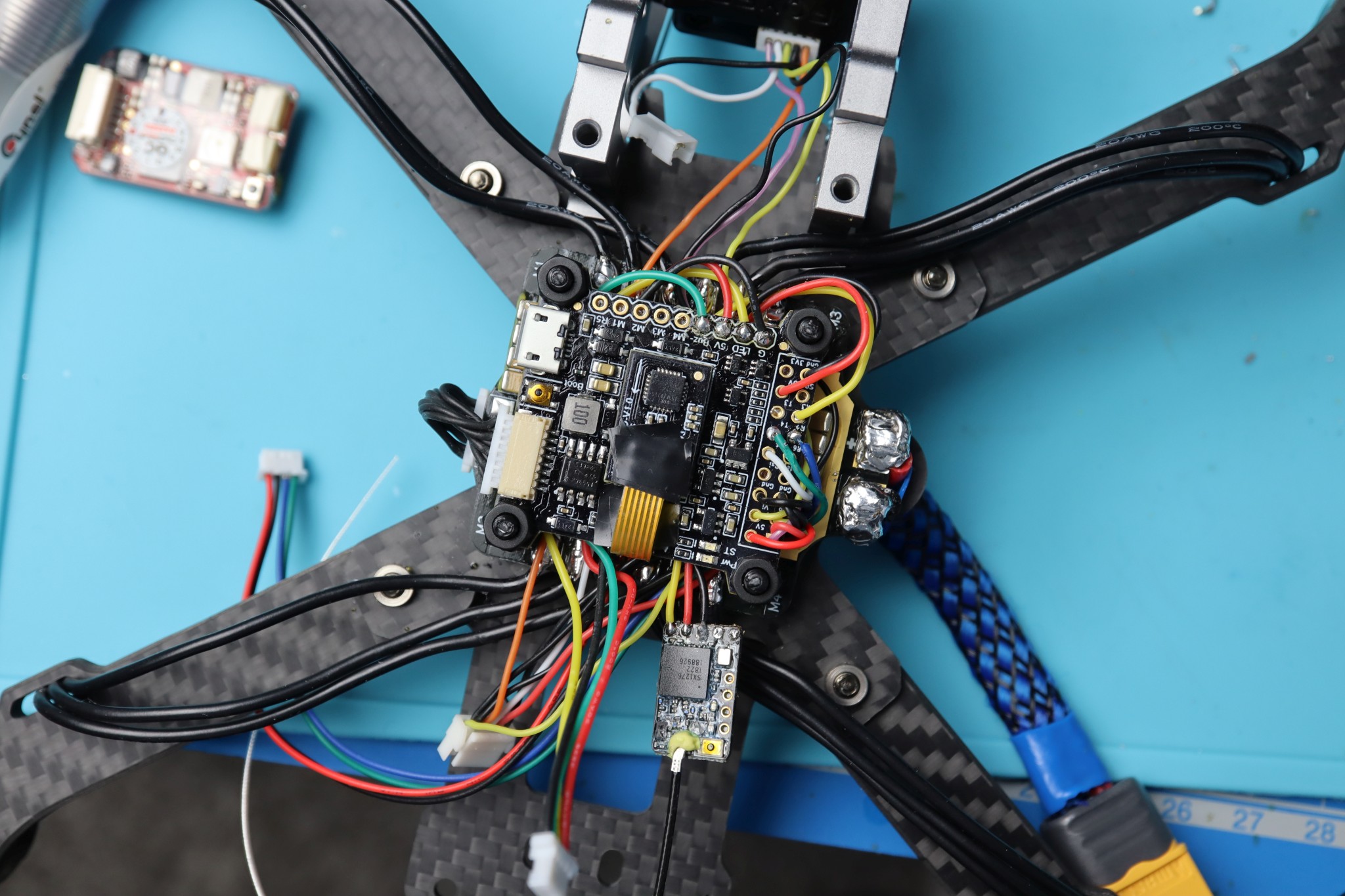
Przewodów jest dość dużo i bardzo nie chciałem, żeby któryś opierał się o kontroler lotu. Spójrzmy więc z góry na całą konstrukcję. Wszystkie kable i wtyczki poprowadziłem pod spodem pomiędzy FC, a ESC. Każda z wtyczek wychodzi w swoim kierunku. Ta od kamery do przodu, zaś pozostałe skierowane są w tył. Zignorujmy na chwilę fakt, że na zdjęciu pojawia się odbiornik R9MM, którego w końcu nie użyłem.
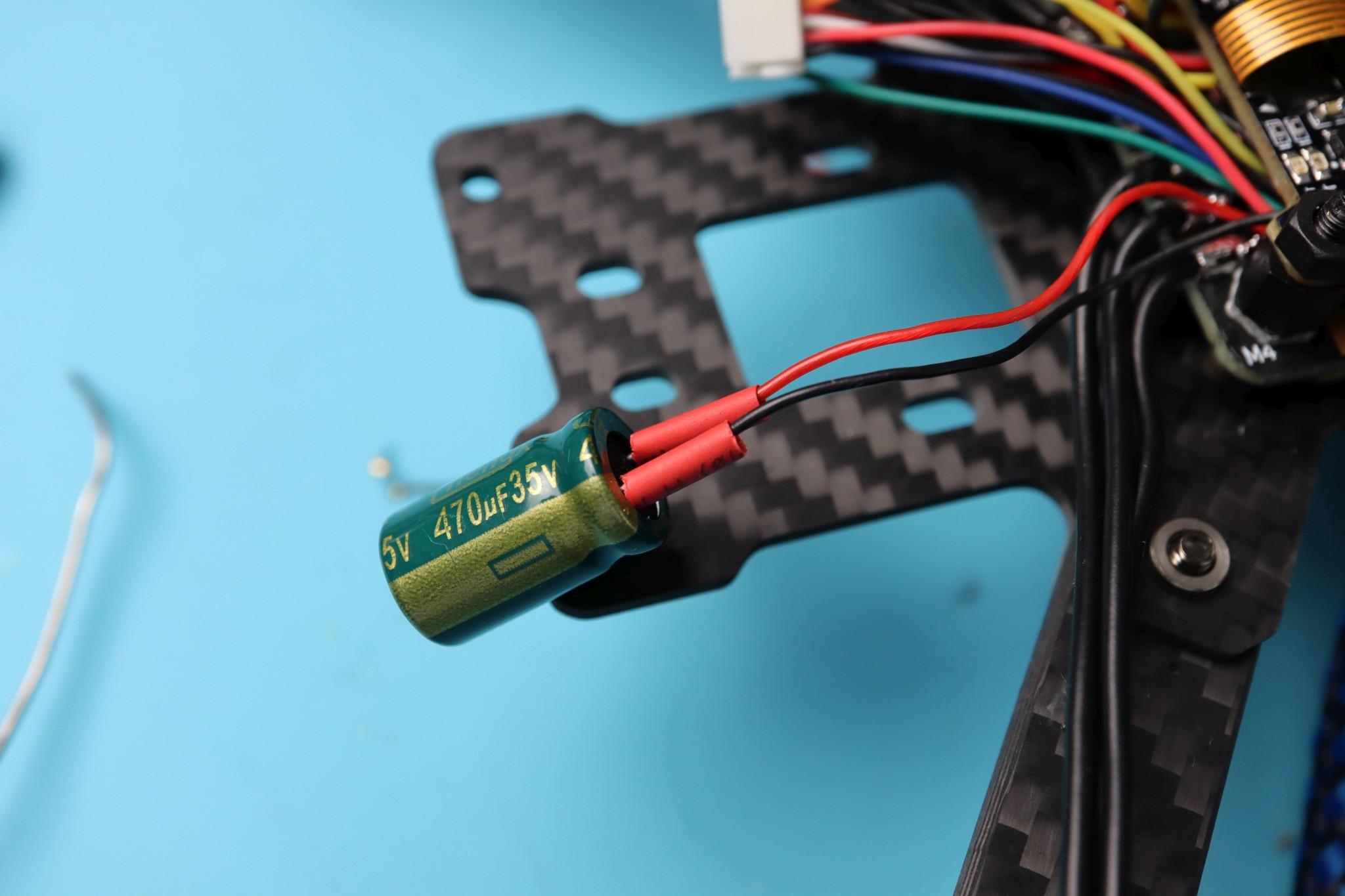
W sumie zapomniałem jeszcze o jednej rzeczy. A dokładnie - nie zapomniałem, ale odłożyłem na później, bo chcialem zobaczyć, jak się wszystko pomieści i jak będzie wyglądać. Chodzi o kondensator. Zwyczajowo, niezależnie od stosowanych elementów, staram się wlutować go równolegle do zasilania, aby filtrować "szpilki" napięcia i zakłócenia wprowadzane przez ESC. Wsród regulatorów są takie, które generują sporo zakłóceń (ang. noisy), zaś inne nie wpływają za mocno na pozostałe komponenty. Najbardziej zauważalnym efektem niestosowania kondensatora przy zasilaniu są pasy i linie, które widoczne są na obrazie z kamery. Na ogół wygląd tych zakłóceń zmienia się wraz z dodawaniem i odpuszczaniem gazu (throttle) podczas lotu. Często cieżką pracę związaną z filtrowaniem zakłóceń przejmują na siebie VTX, czyli nadajniki FPV. Wiele z nich ma już filtr LC, który przynajmniej częściowo redukuje nieprzyjemne efekty. To dlatego właśnie, mając wyższej jakości VTX, warto podłączyć zasilanie kamery do niego, a nie do kontrolera lotu (!). Jeżeli jeszcze pamiętacie - tak właśnie zrobiłem w swojej konstrukcji. VTX jest zasilany z baterii, ale ma wyjście (filtrowane) 5V właśnie dla kamery.
Filtr LC owszem pomaga, ale nie jest w stanie poradzić sobie ze zbyt gwałtownymi skokami i spadkami napięcia, dlatego dodatkowo stosujemy kondensator elektrolityczny, low-ESR (niskoimpedanycjny) o limicie napięcia przynajmniej 35V (dla 4S), pojemności od 330uF (mikrofaradów) do 1000uF. Rozłóżmy to teraz na części pierwsze.
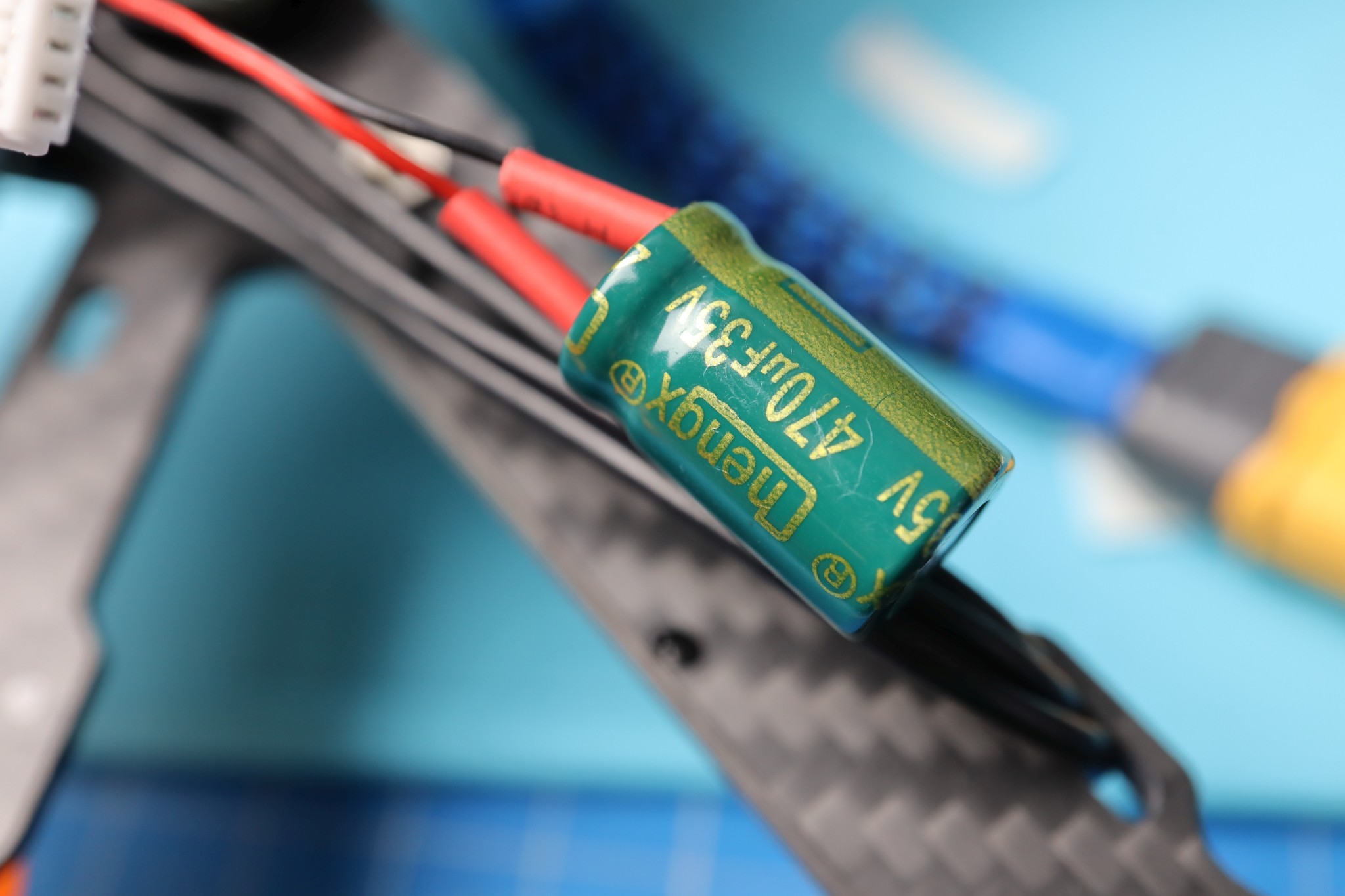
Kondensator elektrolityczny, czyli taki jak na zdjęciu poniżej. Musimy pamiętać, że w odróżnieniu od ceramicznego, ten jest biegunowy. Ma swój + i -, a ich zamiana spowoduje rozerwanie kondensatora przy próbie jego naładowania. Dość spektakularny efekt, ale nie chcemy tego sprawdzać sami. Zwracajmy uwagę na szary pasek, albo oznaczenie "-" na obudowie.
Limit napięcia do 35V oznacza, że może on przyjąc taki skok i wciąż pracować normalnie. Zasilanie koptera to raptem 16.8V (naładowana bateria 4S), ale podczas pracy ESC mogą swobodnie spowodować skok do 24V i wyżej. Z tego względu kondensatory kupujemy ze sporym zapasem. Jeśli zamarzy nam się latanie na 5S i 6S (22.2V) , warto podbić maksymalne napięcie kondensatora jeszcze o oczko w górę.
Następny temat to low-ESR. Elementy tego typu lepiej radzą sobie ze skokami napięcia o wyższej częstotliwości, które są obecne podczas latania kopterem. Oznacza to, że kondensator jest w stanie być szybciej ładowany i rozładowywany - stąd mowa o wyższych częstotliwościach.
No dobrze, po tej sporej dawce teorii pora tylko zapamiętać, że rolą kondensatora jest wygładzenie skoków napięcia. Ładuje się on niczym mała bateria, gdy pojawia się wzrost i jednocześnie oddaje ładunek, gdy dochodzi do spadku. Obszerny artykuł na ten temat jest też na blogu Oscara Lianga - https://oscarliang.com/capacitors-mini-quad/ . Co prawda dziś nie musimy być tak restrykcyjni, jak podaje autor, ale stosowanie kondensatora na wejściu zasilania wciąż ma sens. W artykule jest też nagranie pokazujące obraz FPV bez kondensatora, oraz po jego wlutowaniu.
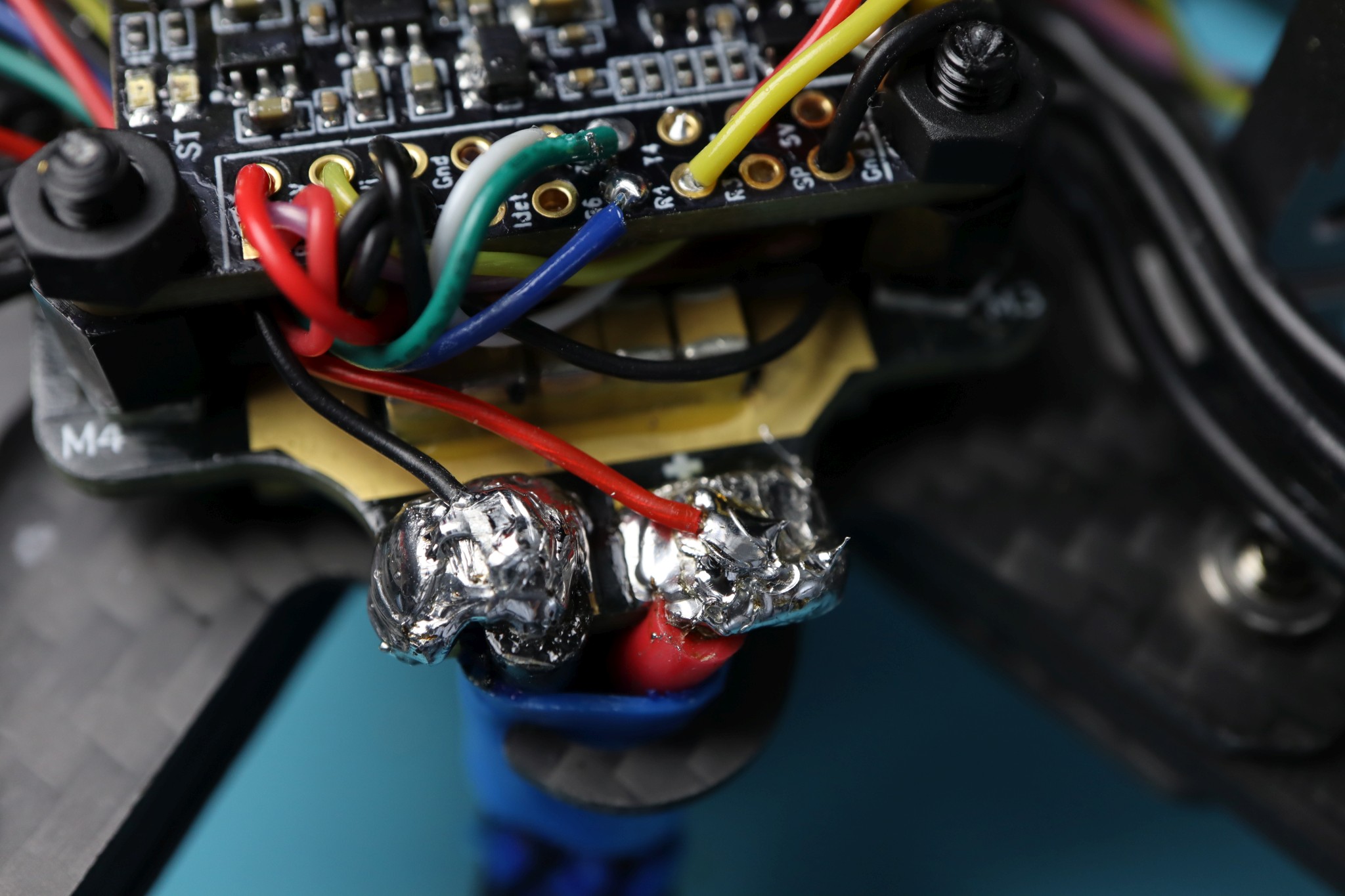
Wracamy teraz do montażu. Kondensator możemy przylutować bezpośrednio do wejścia zasilania, albo na osobnym przewodzie, aby umieścić go w nieco dogodniejszym miejscu. Jak widać ja użyłem dwóch cienkich przewodów i "wyciągnąłem" go nieco dalej. Miejsca lutowania kabli zasilających miałem już polakierowane PVB60, więc musiałem wpierw przetopić się lutownicą przez lakier. Oprócz tego, że daje to nie do końca przyjemny zapach, jest bezproblemowe i szybko dostaniemy się do samej cyny. Trzeba tylko pamiętać, żeby pokryć całość lakierem raz jeszcze, gdy już skończymy lutować.
Dość świeżą i pomysłową opcją jest dolutowanie kondensatora bezpośrednio do wtyczki XT-60 i założenie na całość folii termokurczliwej. Są już gotowe przewody o takiej konfiguracji, które możemy kupić, aby nie robić tego samemu.
Kondensator w którymś momencie przymocuję do ramy, jednak na razie tylko wypuściłem go gdzieś z tyłu koptera i zostawiłem do momentu wyboru lokalizacji VTX oraz odbiornika. Nim przylutujecie przewody do nóżek, załóżcie na wierzch cienkie termokurczki. Chodzi o to, żeby nie pozostawiać odsłoniętych elementów, przez które płynie prąd, bo zetknięcie się nóżki kondensatora z ramą spowodowałoby gwałtowne jej uziemienie.
W następnym kroku zabrałem się za odbiornik. XSR również ma gniazdo, więc wystarczyło podłączyć do niego wtyczkę. Założyłem też na niego nową folię termokurczliwą, która, jak widać, sięga kawałek poza anteny. W XSR są one wlutowane na sztywno, więc chodziło o to, żeby były dodatkowo zabezpieczone.
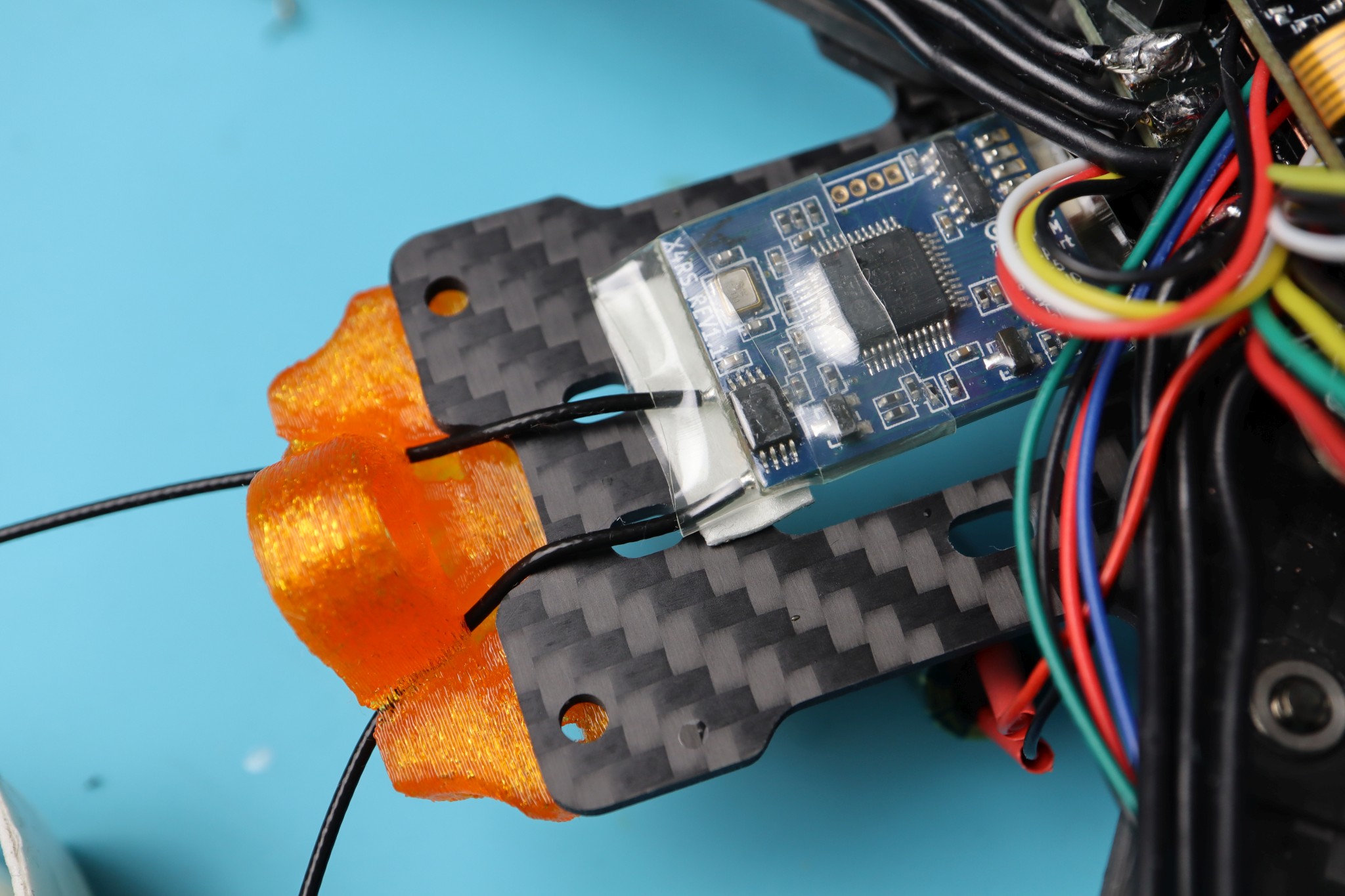
W zestawie z ramą dostałem też mocowanie z TPU, które pozwala ustawić anteny pod odpowiednim kątem. Przeciągnąłem je więc wstępnie przez otwory, a sam odbiornik wkleiłem taśmą dwustronną, aby trzymał się ramy.
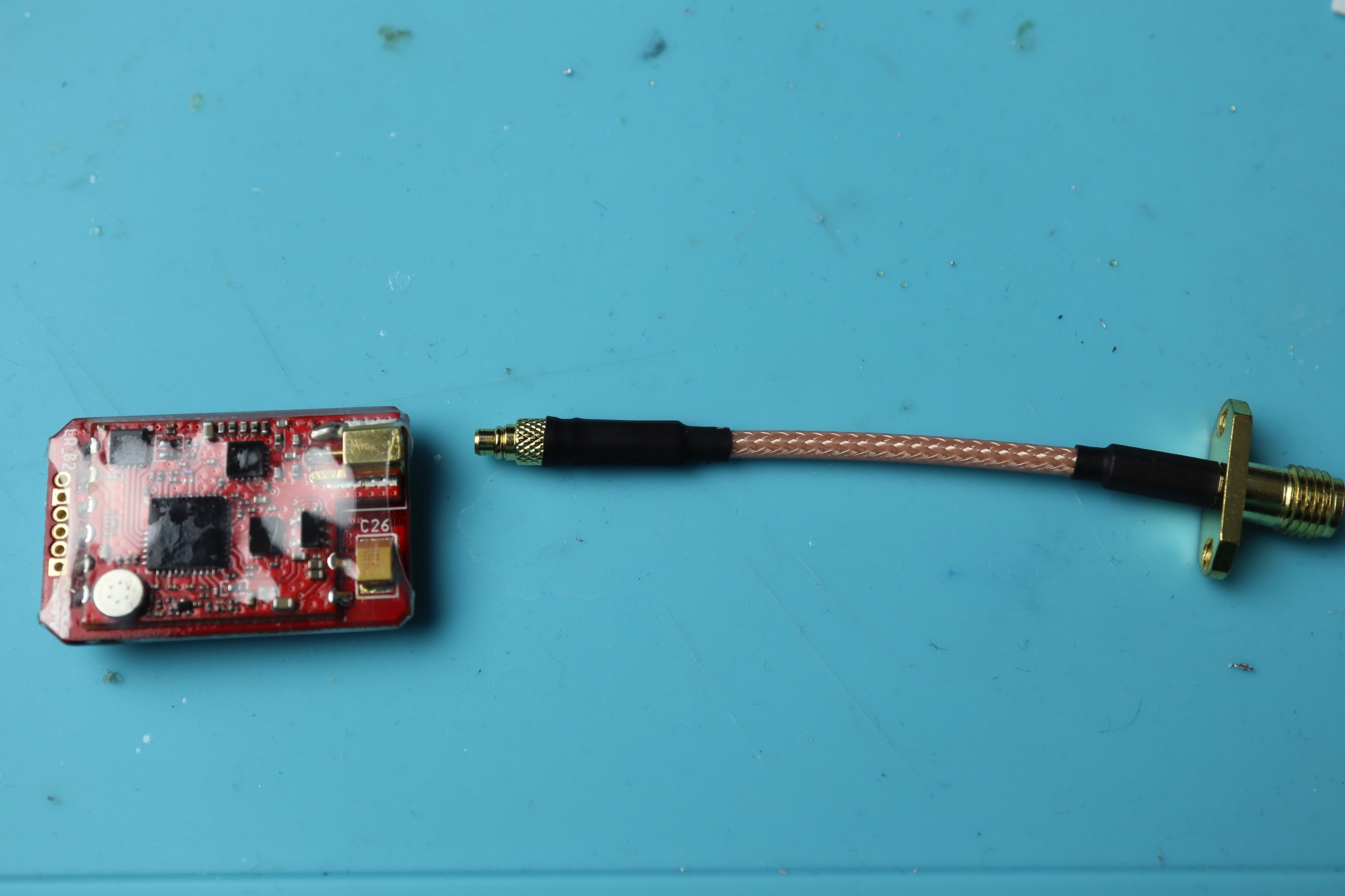
Następnym krokiem jest nadajnik. Ten, który mam posiada złącze MMCX. W zestawie był pigtail (po prawej), który po drugiej stronie ma końcówkę SMA. Ów "ogonek" jest dość sztywny i nie należy go przesadnie zginać. Istotne jest, aby go nie łamać, a starać się, aby był wygięty wzdłuż możliwie dużego łuku.
Wpierw zdecydowałem się zamocować końcówkę SMA na końcu mocowania z TPU, a potem dopiero podłączyć do nadajnika i zobaczyć, jak mogę ułożyć pigtail w środku.
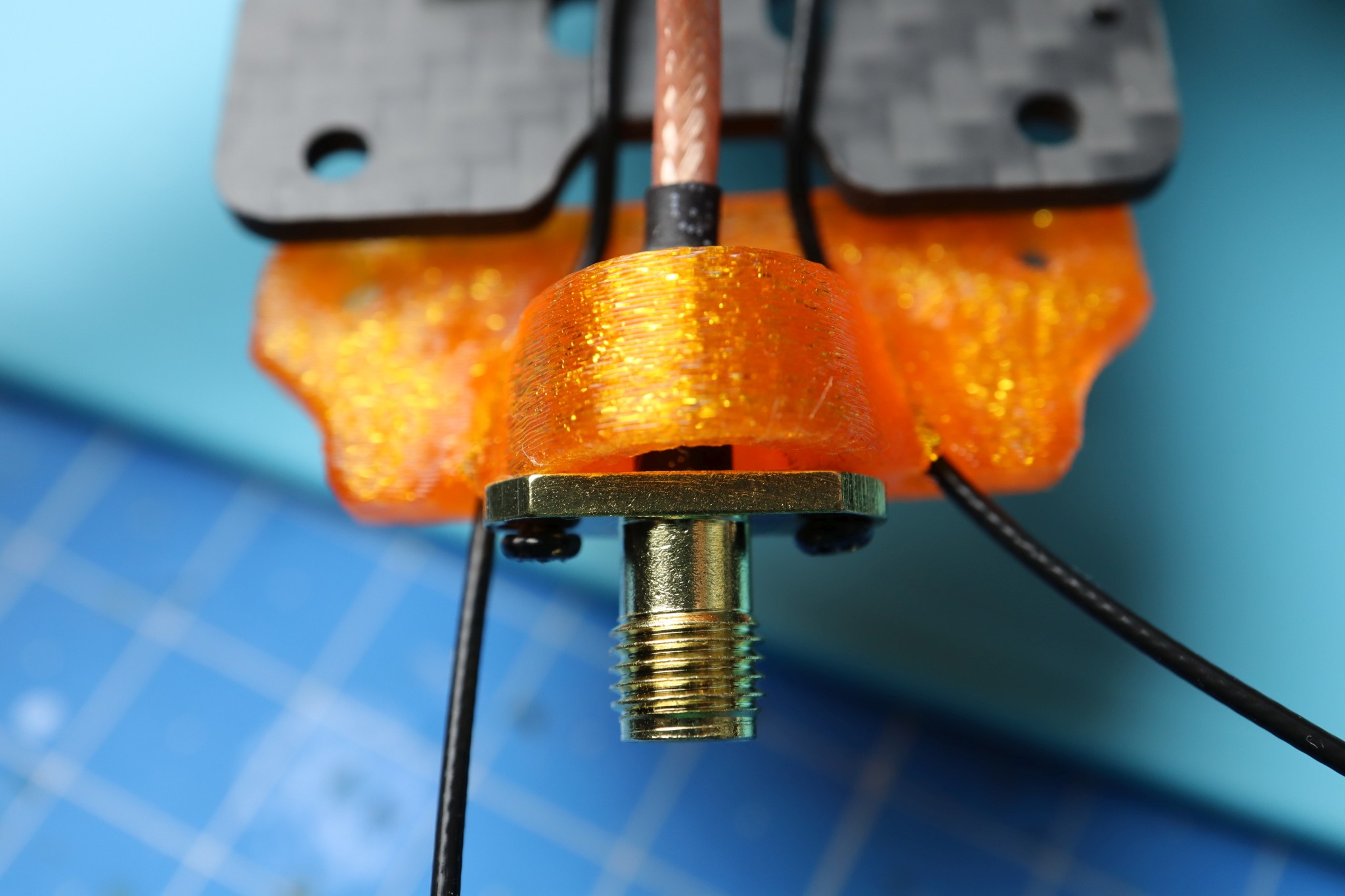
Złącza SMA mają często dwa otwory po bokach, w które można wkręcić śrubki. Niestety sam wydruk nie posiadał odpowiednich gwintów w środku, ale z uwagi na to, że jest elastyczny, dało się po prostu wejść wprost w materiał. Wkręciłem więc dwie śrubki pod lekkim kątem, aby wokół było możliwie dużo TPU i tym samym nie osłabić wydruku. Całość się trzyma i dało się potem wkręcić antenę.

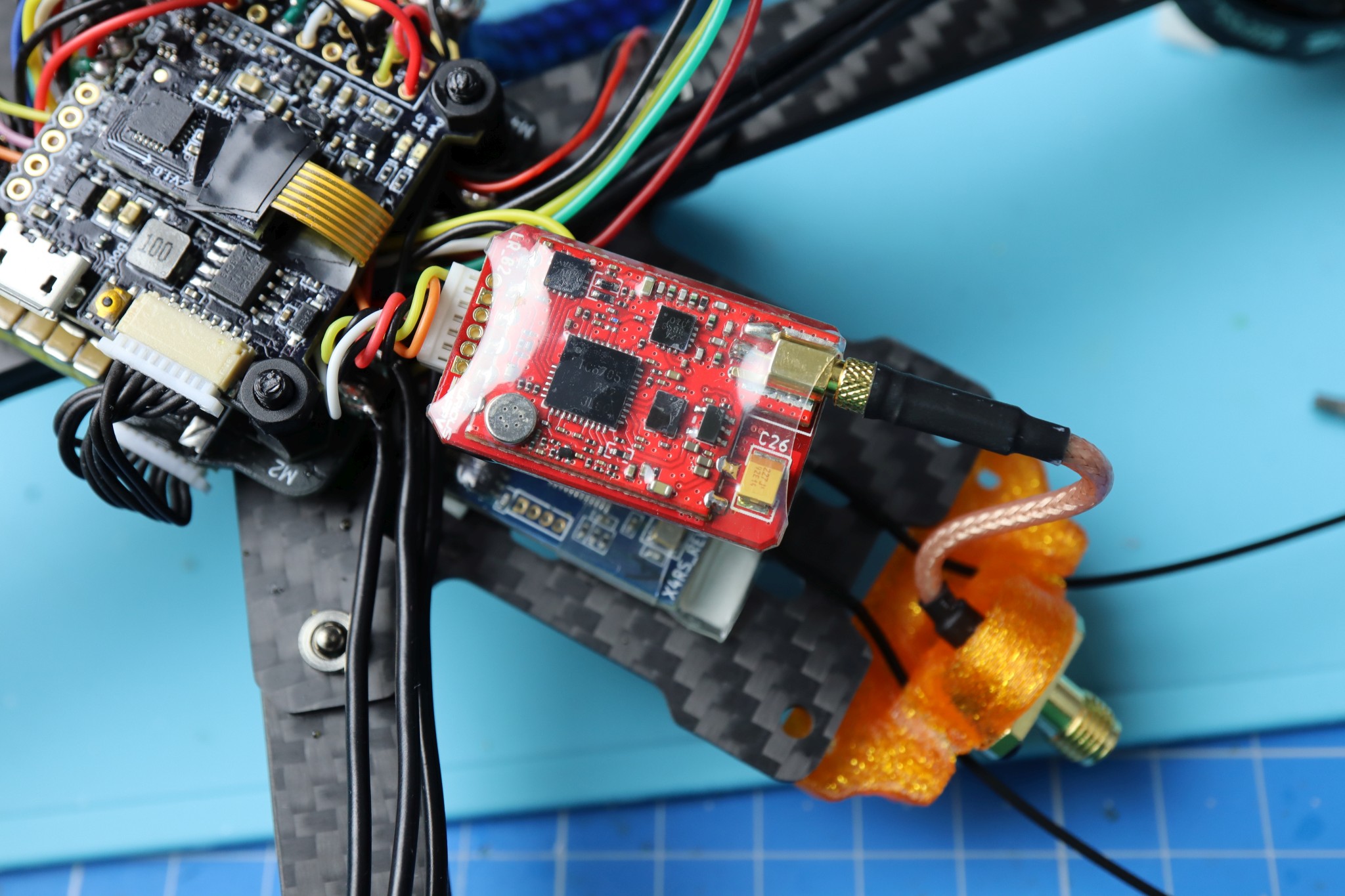
Umiejscowienie nadajnika okazało się wcale nie takie proste. Tak naprawdę najlepiej byłoby użyć anteny wprost ze złaczem MMCX bez pigtaila, ale takiej akurat nie miałem. Jak możecie zobaczyć na zdjęciu poniżej, nadajnik musi się zmieścić pomiędzy kontrolerem lotu, a samym mocowaniem z TPU. Pigtail w okolicach złącza MMCX jest całkowicie sztywny i gnie się dopiero za czarną termokurczką, co zwiększa efektywnie długość całego układu.
Jak to rozwiązałem? Pokażę Wam w następnej części artykułu, a póki co dzięki za uwagę i do następnego!
{kind=link}