Skończyliśmy ostatnio na przylutowaniu przewodów od nadajnika FPV oraz kamery do kontrolera lotu. Teraz będziemy kontynuować tę operację poprzez podpięcie GPSu, odbiornika i buzzera z LEDami. Do roboty!
Z uwagi na to, że nie miałem do tej pory koptera z GPS, postanowiłem do najnowszej konstrukcji dodać także i ten układ. Posłużyłem się modułem Neo-M8N od HGLRC. Cały element kosztuje w okolicach 50 zł, więc w kontekście składania własnego koptera nie uszczupli mocno budżetu.
Zacznijmy od tego, że wspomniany moduł obsługuje napięcie zasilające zarówno 3.3V, jak i 5V. Akurat w przypadku GPSów są egzemplarze, które akceptują wyłącznie 3.3V i wyższe napięcie może je popalić, więc dobrze jest to sprawdzić. Z uwagi na to, że na kontrolerze lotu nie brakuje wyjść 5V, mogę równie dobrze wpiąć się z zasilaniem obok nadajnika. W najgorszym wypadku musiałbym wlutować miniaturowy regulator step-down 5V->3.3V po drodze, ale tutaj mam swobodę wyboru. To kolejny dobry powód, aby zobaczyć, jak wyposażony i zaprojektowany jest kontroler lotu, nim wrzucimy go do koszyka.
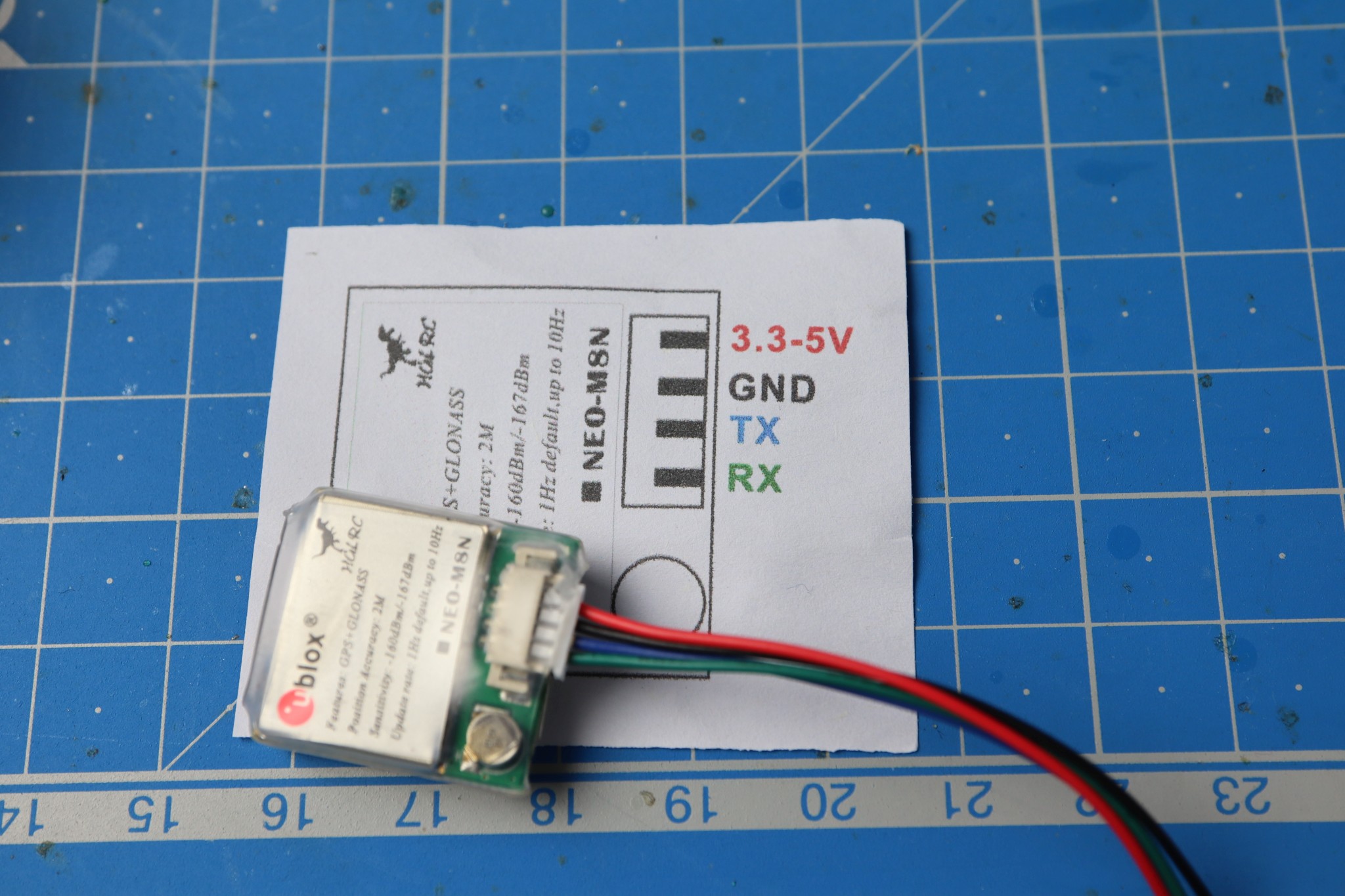
GPS ma na końcu gniazdo, a w zestawie jest wtyczka z dość długimi przewodami. Niestety ich izolacja jest wykonana z PVC (polichlorku winylu), a nie silikonu, więc łatwo ją przegrzać i stopić lutownicą. Dodatkowo same przewody są przez to nieco sztywniejsze, ale to już trudno. Po prostu mając takie kabelki musimy być bardziej uważni i pewni przy lutowaniu, bo ten rodzaj izolacji wybacza mniej błędów. Lepiej też zostawić większy zapas przewodu na długość, ponieważ w przypadku, gdy przytopimy izolację i odsłoni nam ona większą część przewodu, zawsze możemy go uciąć i zacząć na nowo.
Wyjątkowo zacznę nie od zasilania, ale przewodów sygnałowych. GPS ma złącza TX i RX, czyli będziemy go podłączać do jednego z UARTów na kontrolerze lotu. Jak już pisałem wcześniej, UART3 pozostawiamy dla odbiornika, natomiast UART6 już zajęliśmy przez SmartAudio. Zostaje więc UART4 - warto zawsze zerknąć do instrukcji i zobaczyć, czy producent sam ma jakieś sugestie odnośnie tego, dokąd podłączać dane urządzenie. W przypadku Kakute F4 jedynie UART3 jest nietypowy, bo ma inwersję sygnału, więc tylko tam zadziałałby podłączony odbiornik FrSky. Pozostałe porty nie mają specjalnych właściwości.
Na "chłopski rozum" zdawałoby się, że TX podłączamy do T4, zaś RX to R4 prawda? Otóż nie! Wynika to z tego, że każde z urządzeń patrzy na sygnał ze swojej strony. GPS wysyła dane przez pin TX, zaś odbiera poprzez RX. Tak samo widzi to kontroler lotu. Żeby więc wszystko działało - pin TX od GPS podłączamy do R4 (!), ponieważ FC będzie ODBIERAĆ na tym pinie sygnał WYSŁANY przez GPS. To działa też w drugą stronę. Kontroler lotu WYSYŁA dane do GPSu przez swój pin T4, które to dane zostaną ODEBRANE na pinie RX. Każda strona nasłuchuje na dane na pinie R (lub RX), zaś wysyła je poprzez T (lub TX), a więc aby każde z nich odbierało dane z drugiej strony, musimy skrzyżować ze sobą przewody i połączyć je tak, jak opisałem wyżej. Dobrze jest to zapamiętać, bo w wielu przypadkach nam się przyda i na pewno prędzej, czy później, sami się spotkacie z tym błędem. Więc jeszcze raz - łączymy na krzyż. Pin TX jednego urządzenia podpinamy do RX drugiego. I na odwrót.
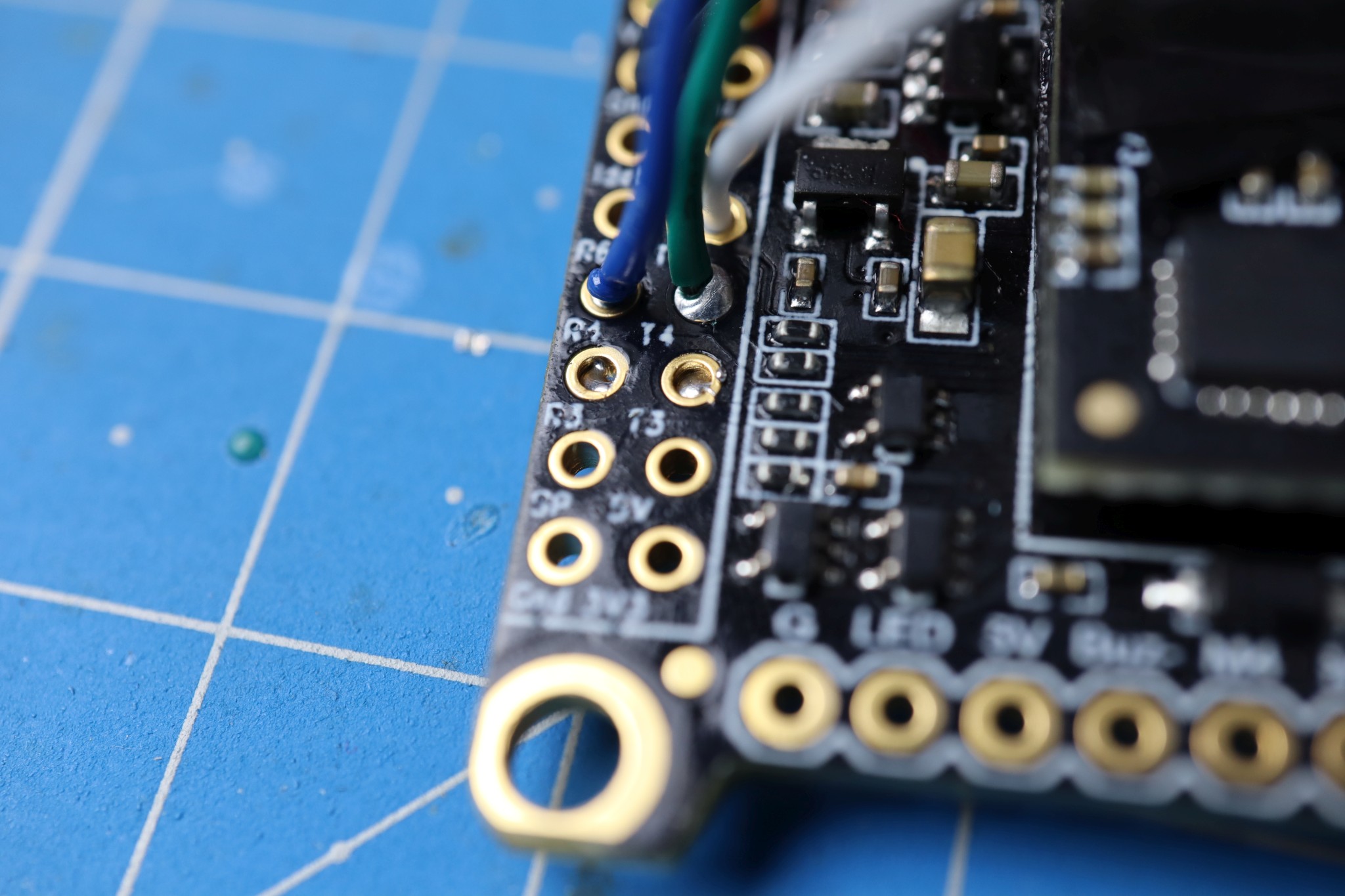
Wracając do kwestii zasilania. Zostały mi dwa złącza 5V. Jedno było u dołu, drugie u góry, obok miejsca, gdzie wlutowałem zasilanie nadajnika. Zwróćmy jednak uwagę, że jeszcze musimy gdzieś podłączć odbiornik. Nieprzypadkowo piny R3 i T3 sąsiadują z zasilającymi. To tam producent przewidział podłączenie tego modułu. Gdybym zajął pin 5V na dole, niepotrzebnie musiałbym ciągnąć zasilanie z górnego pinu, który jest dość daleko i niepotrzebnie krzyżowałbym przewody. Tak będę miał wszystko obok. Zauważcie więc, że zasilanie GPS pociągnąłem z pinów po prawej stronie u góry. Pierwszy to 5V, a trzeci w kolumnie to 'Gnd', czyli uziemienie. I tyle, wtyczka od GPSu podłączona!
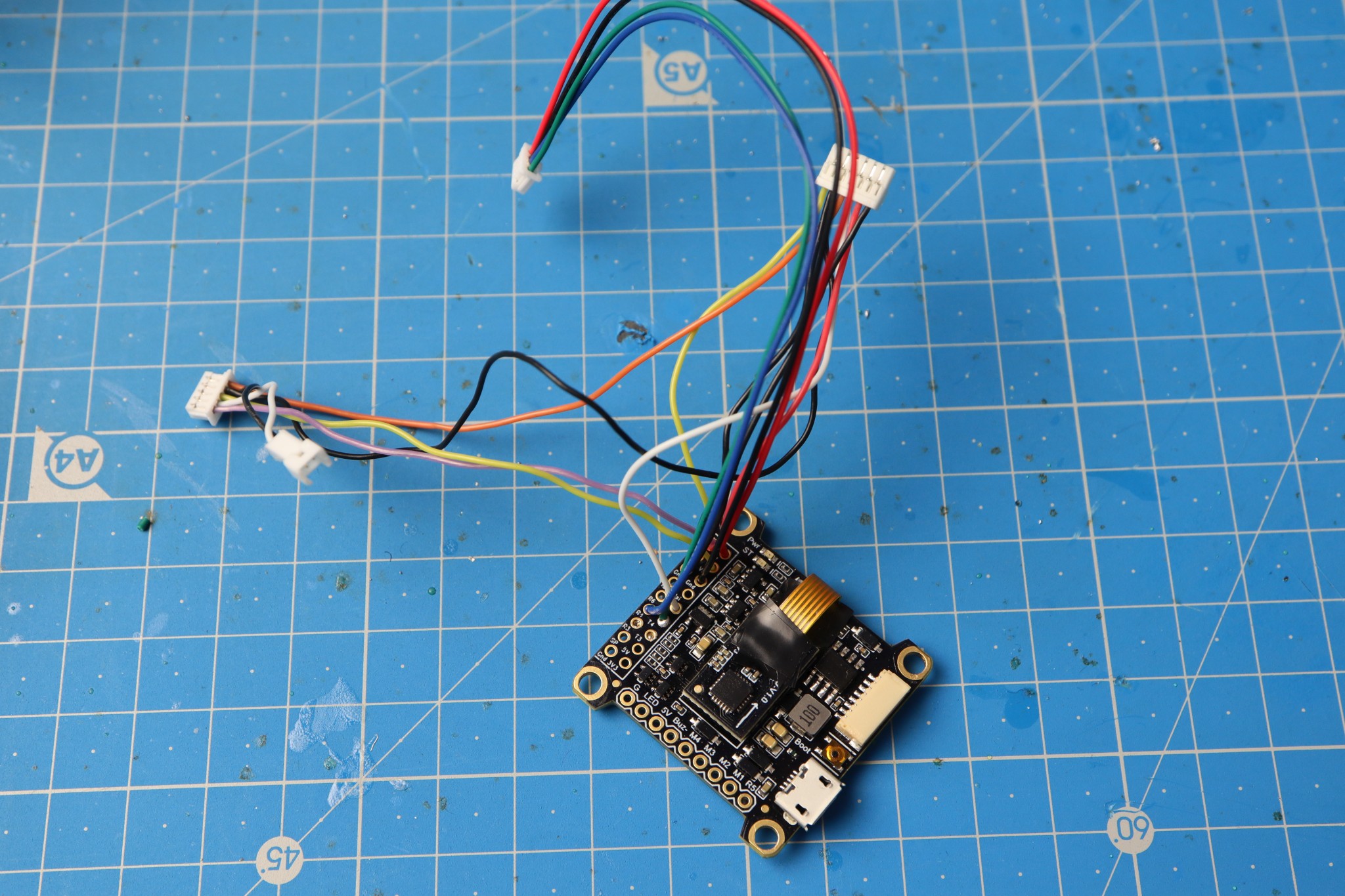
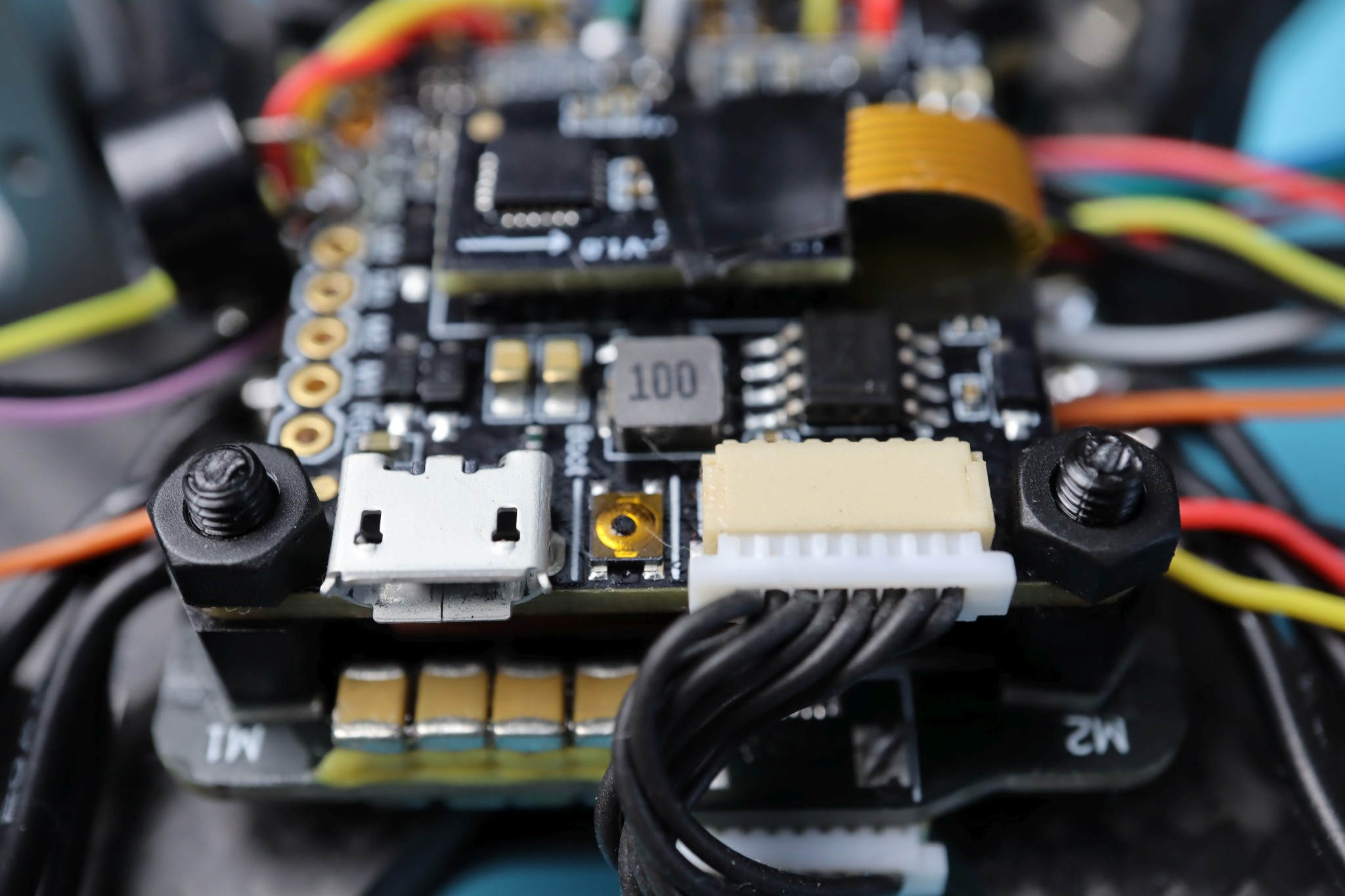
Możecie na zdjęciu poniżej zauważyć na czym właściwie stoimy. W tej chwili są już gotowe wtyczki do kamery, nadajnika FPV i GPSu. Co więcej kontroler lotu nie jest w żaden sztywny sposób połączony z pozostałymi elementami. Montując go po prostu podłączę go z powrotem krótki przewodem z ESC, który widzieliśmy wcześniej. Zaletą tego rozwiązania jest to, że mogę w każdej chwili łatwo wyjąć go z koptera, ponieważ nic nie muszę rozlutowywać. Dodatkowo, mogę pojedynczo wpinać urządzenia i patrzeć, czy wszystko działa. Wbrew pozorom jest to bardzo ważna sprawa, ponieważ już zdarzyło mi się mieć zwarcie w układzie (na szczęście regulator 5V to wytrzymał) i diagnostyka to metoda prób i błędów. Dobrze jednak móc wypiąć wszystkie dodatkowe urządzenia lub wpinać je pojedynczo, aż znajdziemy to, które nie działa poprawnie. No i łatwo je wymienić, gdyby okazały się wadliwe. Taka modularna budowa naprawdę upraszcza późniejsze serwisowanie koptera, więc w ramach możliwości warto się starać o to, żeby jak najmniej połączeń było permanentnych. Oczywiście są pewne granice i bardzo odradzam stosowanie wtyków bananowych pomiędzy ESC, a silnikami, bo są ciężkie i wcale nie takie pewne. Jeśli chcecie mieć większą elastyczność to lepiej kupić po prostu osobne ESC, które łatwo odlutować, bo leżą wprost na ramionach, więc nie trzeba rozkładać całego koptera, gdyby się popaliły.
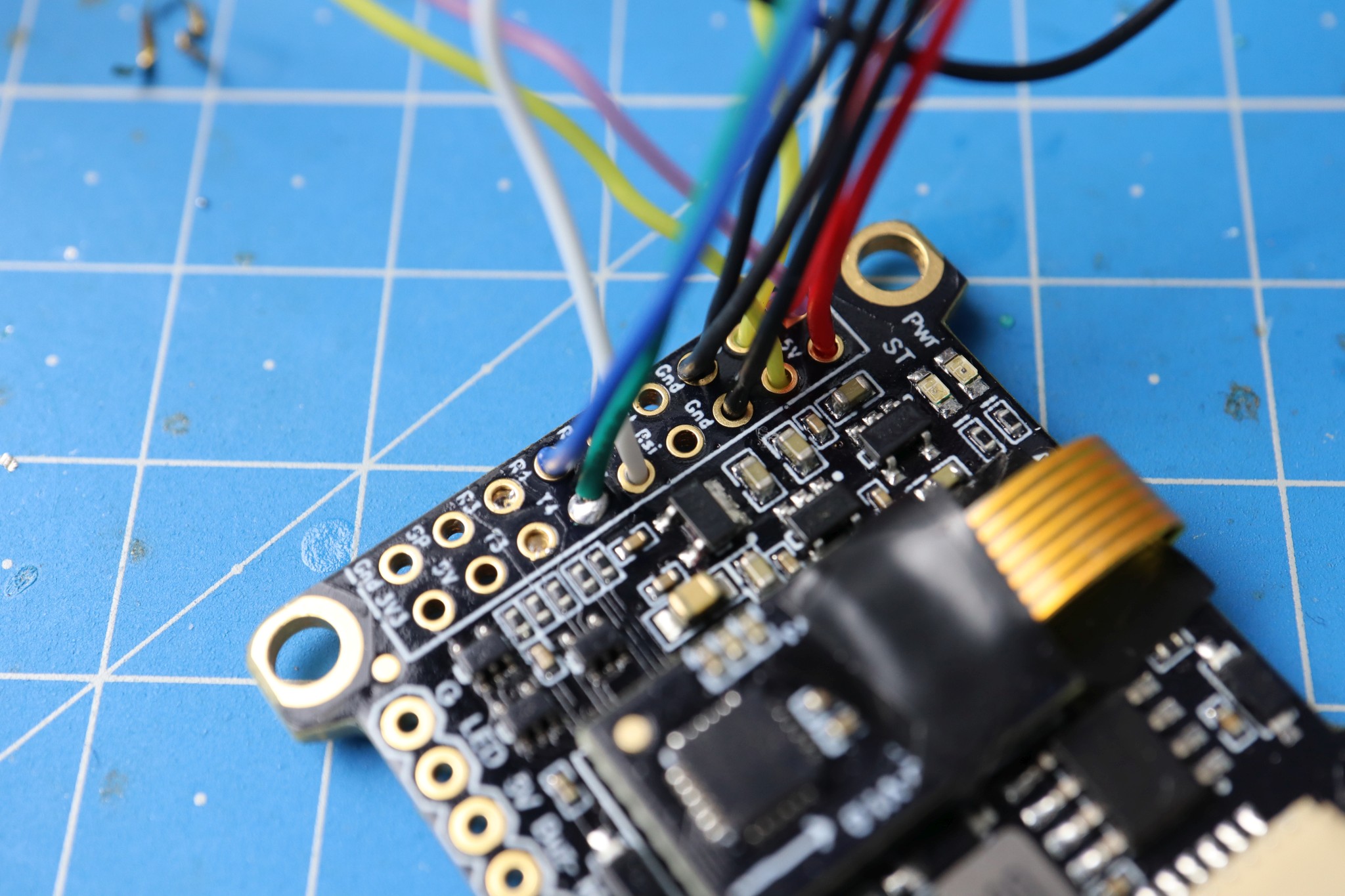
Z odbiornikiem jest tak naprawdę najmniejszy problem. Ponownie potrzebuje on zasilania 5V, więc pociągniemy je z dolnego pinu. 'Gnd' znajdziemy zaraz po skosie. Żółty przewód - sygnałowy to z kolei wyjście SBUS. Celowo mówię "wyjście", ponieważ odbiornik otrzymuje sygnał z aparatury, który następnie protokołem SBUS podaje do kontrolera lotu. Ten ostatni odczytuje go, a więc lutujemy kabelek do pinu R3, który jak już wspominaliśmy wcześniej, jest właśnie tym odbiorczym dla UARTu. Producent przewidział też, że możemy chcieć użyć SmartPortu i do tego dedykowany jest pin "SP". Na zdjęciu jeszcze niepodłączony, ponieważ wcześniej kombinowałem z odbiornikiem R9MM od FrSky, który jednak udało mi się uszkodzić, więc pozostałem przy XSR, który mialem na miejscu. Ważne jest jednak to, że układ przewodów pozostaje taki sam.
Na wszelki wypadek jeszcze spojrzymy na układ wyjść samego odbiornika. XSR ma 5 wychodzących przewodów z czego jednego z nich nie będziemy używać. Jest to CPPM. Odbiornik potrafi wyprowadzić dwa rodzaje sygnału, starszy - CPPM oraz nowszy SBUS. Protokół CPPM używany był wcześniej i nie pozwala dostarczać sygnału tak często (a więc jest wolniejszy), niż SBUS. Z uwagi na to, że i tak oba protokoły wzajemnie się wykluczają - potrzebujemy tylko jednego naraz - końcówkę CPPM możemy i tak wyjąć z gniazda.
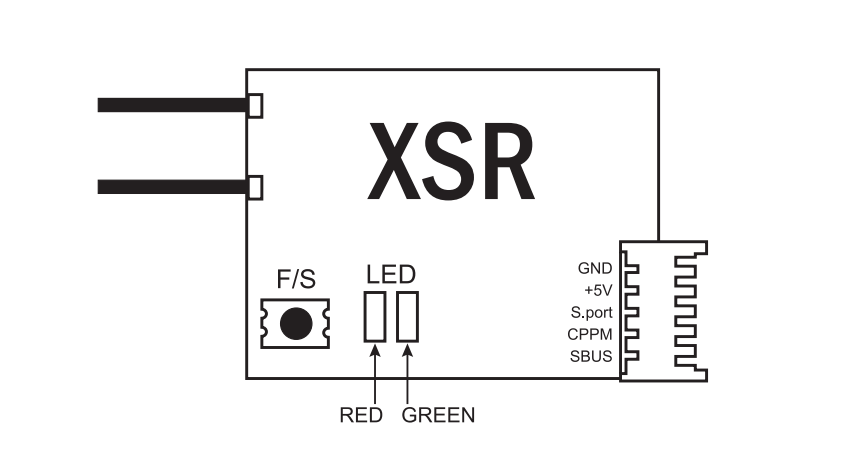
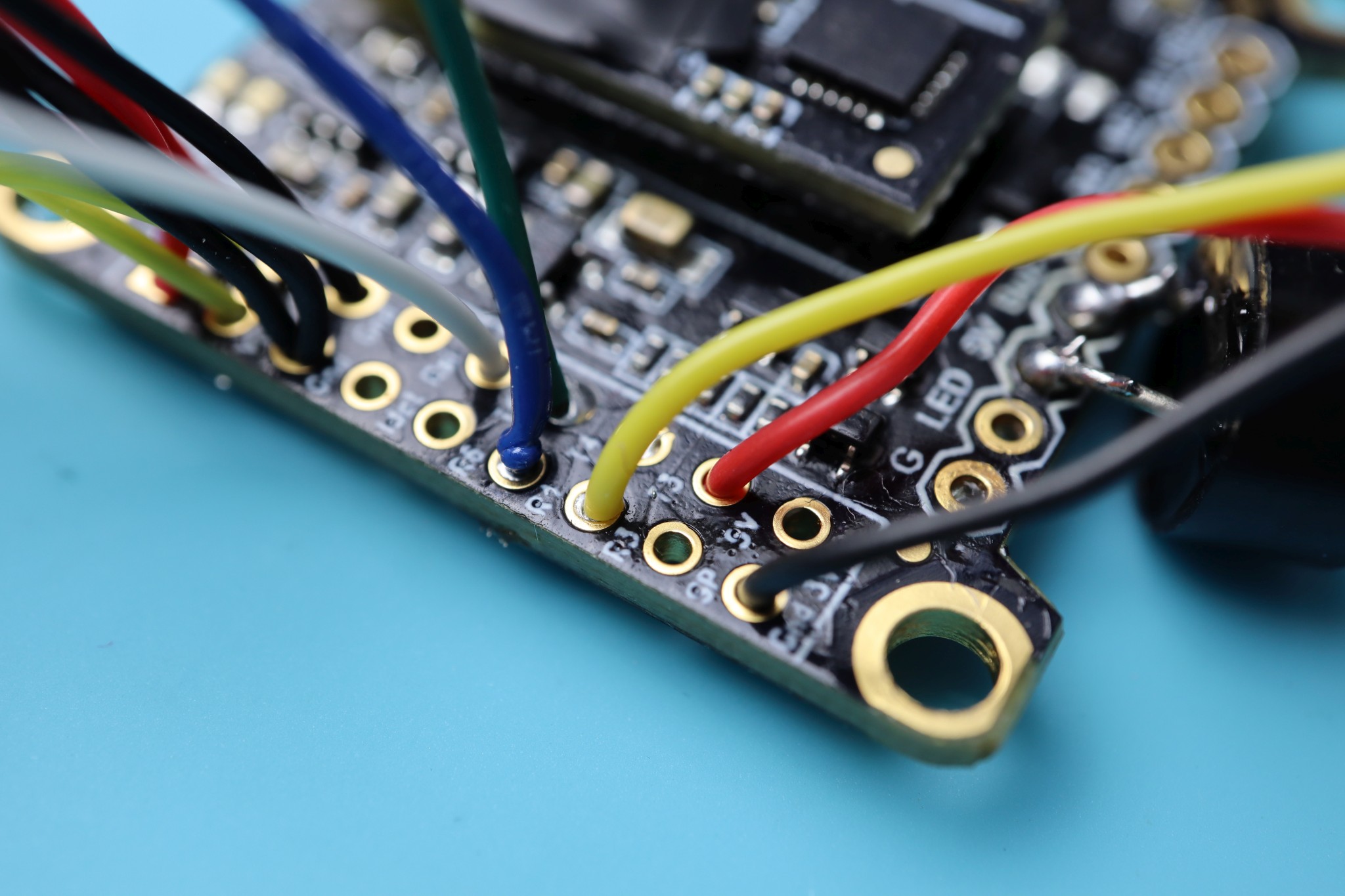
Pozostają nam 4 przewody. Czerwony i czarny to zasilanie, więc odpowiednio łączymy już wspomniane 5V z 5V na kontrolerze lotu. To samo z "GND". S.Port to wspomniany już SmartPort, który lutujemy tam, gdzie napisane jest SP na kontrolerze lotu - poniżej R3. Z kolei sam sygnał SBUS wchodzi właśnie do tego ostatniego pinu, czyli R3. Gotowe.
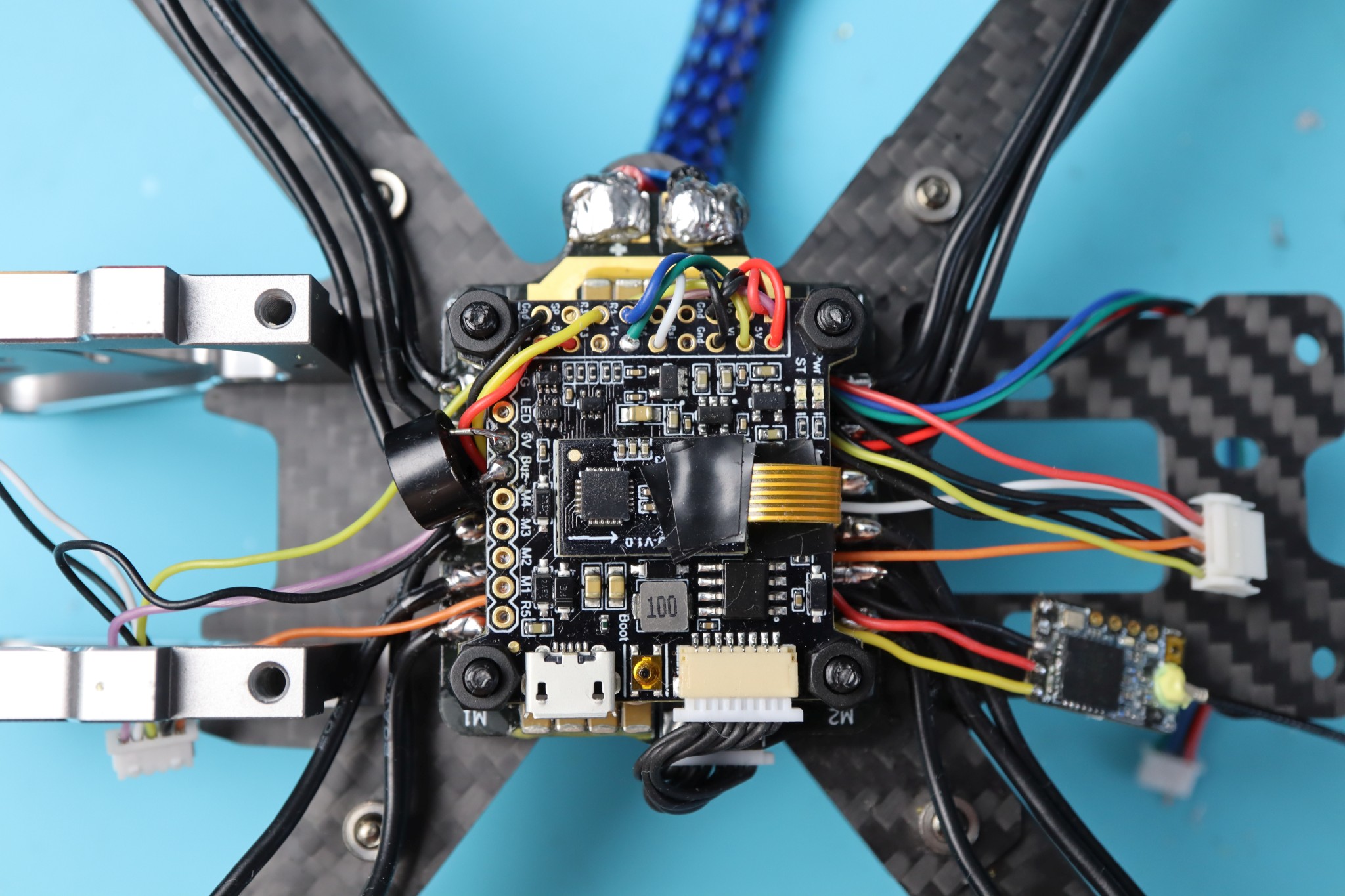
Czy to już wszystko? Nie - jeszcze nie. Jeśli uważnie przyjrzeliście się zdjęciu powyżej, to zobaczyliście na nim buzzer. Po lewej stronie płytki wlutowałem za pamięci brzęczyk. Jak się chwilę później okazało - niepotrzebnie, ponieważ wraz z ramą w zestawie dostajemy bardzo solidnie wykonaną płytkę z diodami oraz właśnie buzzerem. Znajdzie się ona z tyłu koptera, więc wymaga nieco dłuższych przewodów. Na szczęście owa płytka również ma gniazdo, więc przewody możemy śmiało przylutować do koptera.

Zastanówmy się nad złączami. Do zasilania buzzera oraz diod będziemy używali wspólnego pinu 5V, który znajduje się na najniżej. Nad nim widzimy "LED". To właśnie tutaj podamy sygnał sterujący, który będzie decydował o tym na jaki kolor diody mają się zaświecić (są RGB, a więc wielokolorowe), czy mają migać i co sygnalizować. Pozostaje nam jeszcze "B-", które jest drugim z pinów od buzzera. Dodatni to właśnie 5V, natomiast poprzez "B-" kontroler lotu będzie decydował, czy brzęczyk zapiszczy, czy też nie. W kopterach używamy buzzerów z własnym generatorem. Oznacza to, że za modulację (ton) dźwięku odpowiada sam moduł, a my tylko przepuszczając przez niego napięcie, lub nie, decydujemy, czy będzie on wydawany. Są też buzzery bez generatora, którym nie wystarczy podać stałego napięcia, tak jak temu powyżej. Wymagają one podania sygnału o częstotliwości, jaką ma mieć wydawany dźwięk. Tak, tak, jeśli podamy prąd, którego napięcie skacze i opada 4000 razy na sekundę to otrzymamy dźwięk o częstotliwości 4kHz (4000 Hz), czyli dokładnie tyle, ile razy zmienia się napięcie. Kontrolery lotu obsługują buzzery z generatorem i dlatego pin "B-" służy tylko temu, aby umożliwić lub odciąć przepływ prądu przez brzęczyk. "Gnd" podłączaliśmy już tyle razy, że szkoda się powtarzać. Spójrzmy teraz na kontroler lotu.
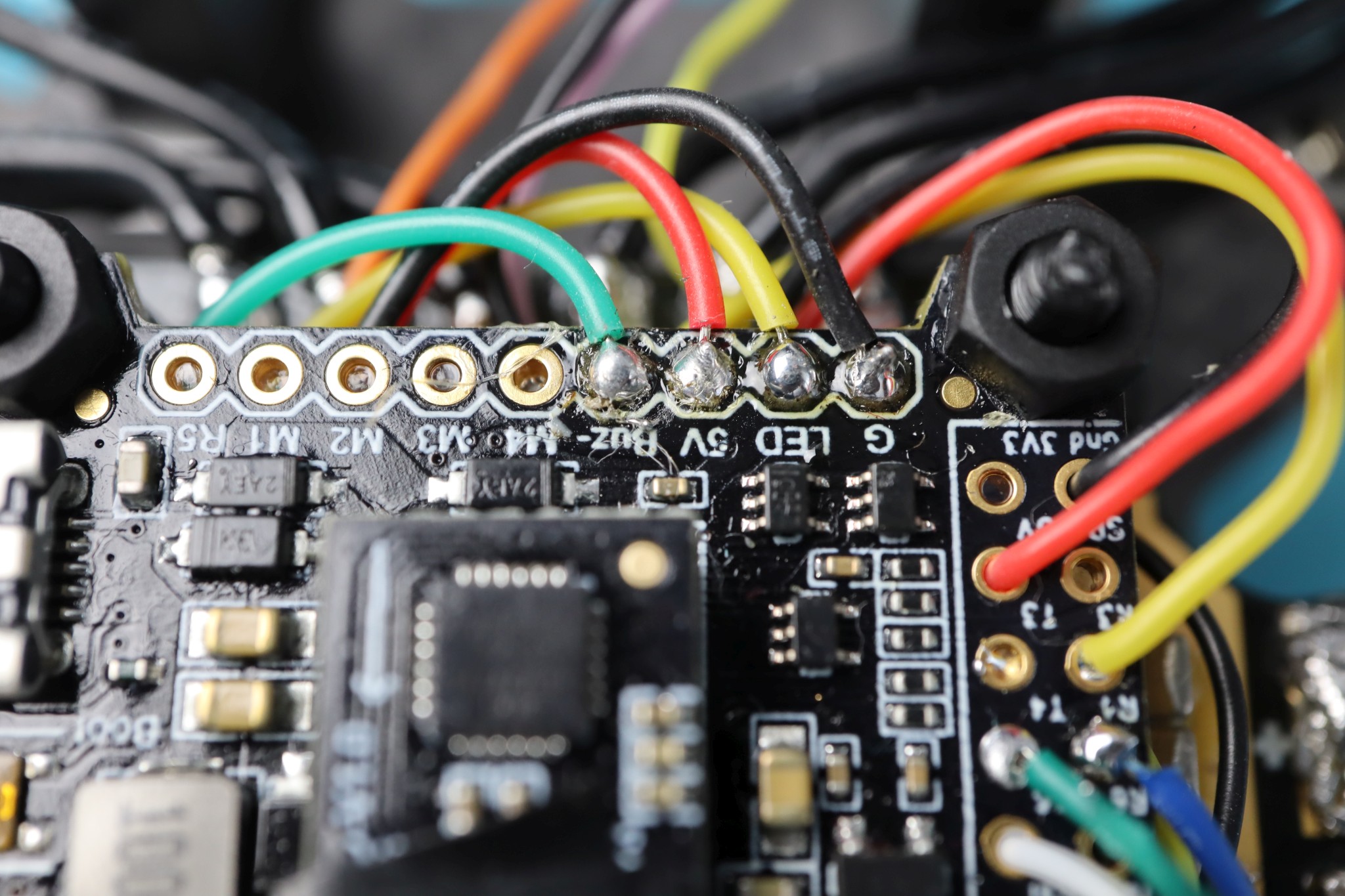
Mam nadzieję, że połączenia są aż nadto odczywiste, ponieważ lutujemy przewody dokładnie do odpowiadających sobie nazwą pinów. No może poza "Buz-", które po drugiej stronie nazywa się "B-". Reszta tak jak leci. Dzięki temu będziemy mieli od razu dodatkowe oświetlenie koptera oraz buzzer, który zasygnalizuje, jeśli pojawi się jakiś problem. Warto pamiętać, że jeśli będziemy chcieli podłączyć jeszcze dodatkowe LEDy to możemy wykorzystać fakt, że diody WS2818B można łączyć ze sobą szeregowo. Co prawda LEDy od GepRC nie mają nigdzie wyprowadzonego wyjścia DOUT, które pozwala podłączyć kolejny pasek LED, ale możemy zawsze umieścić pasek LED pomiędzy kontrolerem lotu, a diodami od GepRC. W przypadku wielu kompletów 5V i GND podłączamy normalnie, sygnał z kontolera lotu biegnie do DIN i do kolejnego paska LED wychodzi poprzez DOUT. I tak łączymy dowolną liczbę diod pamiętając o tym, że nie możemy przeciążyć regulatora 5V, który musi je też zasilić!
Po podłączeniu wszystkiego możemy się postarać przeciągnąć wszystkie przewody pod kontrolerem lotu (pomiędzy nim, a ESC), aby nie plątały się przy składaniu. W tej chwili możemy też wkręcić nakrętki, które będą trzymały kontroler lotu na słupkach. Jak widać nie używam żadnych elastycznych podkładek pod FC, ponieważ żyroskop i tak jest na miękkiej gąbce, która izoluje od wibracji. Nie trzeba więc dodatkowo zmiękczać mocowania. Gdyby kontroler lotu miał przylutowany żyroskop wprost do płytki, użyłbym gumek pomiędzy słupkiem, a nim.
Jeśli dobrnęliście do tego etapu to gratuluję! Właściwie możemy już powoli odkładać lutownicę i zabrać się za podłączanie i montaż poszczególnych elementów. Warto na tym etapie zrobić test i zobaczyć, czy wszystkie urządzenia się uruchomią po podłączeniu. Polecam zacząć pojedynczo. Najpierw podłączmy zasilanie i zobaczmy, czy kontroler lotu wciąż się uruchamia (zapali się na nim dioda). Następnie podłączmy nadajnik FPV (jeszcze bez kamery) i powtórzmy operację. Jeśli i na nim zapaliły się diody - idźmy dalej - podłączmy kamerę. Jeśli złapiemy obraz w goglach to znaczy, że i ona działa (mając włączony nadajnik i kamerę powinniśmy zobaczyć wideo - nie potrzeba nic więcej konfigurować). Oczywiście pamiętajmy o tym, żeby przeskoczyć wszystkie kanały, bo nadajnik będzie pracował na jednym, domyślnym na tym etapie. Wreszcie pod koniec podłączmy odbiornik. Jeśli i on miga choć jedną diodą - wygląda, że jesteśmy na dobrej drodze. GPSu również nie zaszkodzi sprawdzić, aczkolwiek ten akurat nie ma żadnej diody sygnalizującej pracę, więc możemy jedynie sprawdzić, że nie powoduje on zwarcia i cała reszta wciąż dostaje zasilanie.
Póki co wystarczy - w następnej części zajmiemy się organizowaniem przestrzeni wewnątrz koptera i łamaniem sobie głowy jak to wszystko pomieścić! Do zobaczenia!
{kind=link}