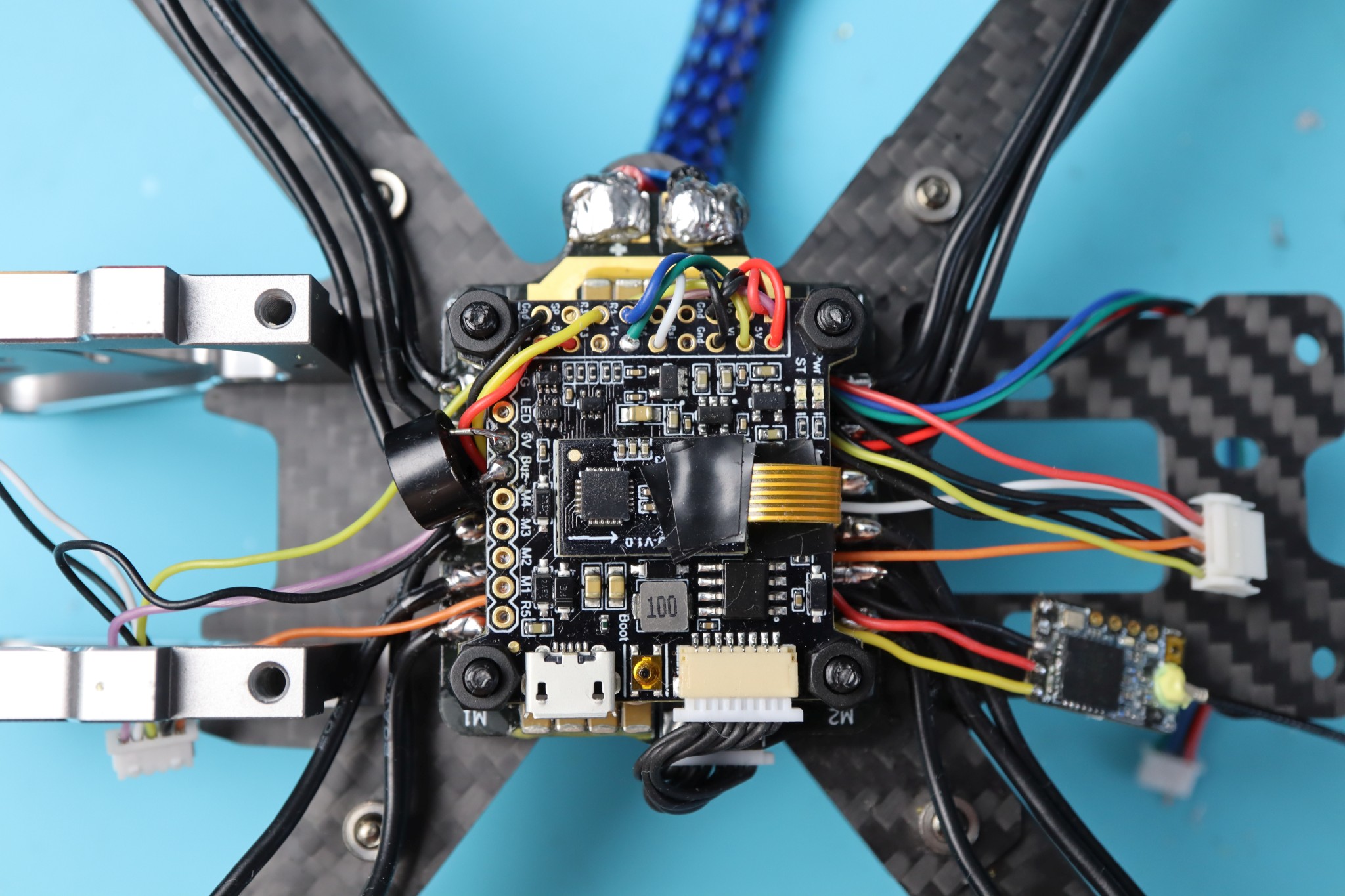
W ostatniej części skończyliśmy lutowanie silników do ESC. Teraz pora się zabrać za kontroler lotu. Ogromną zmianą w stosunku do konstrukcji sprzed lat jest to, że w zasadzie nie potrzebujemy żadnych sztywnych połączeń. Do kontrolera lotu dolutujemy wyłącznie przewody, wszystkie zakończone wtyczkami do poszczególnych urządzeń. Przygotujemy go do podłaczenia: nadajnika FuriousFPV Stealth ze SmartAudio, odbiornika FrSky XSR, GPSu BN-220 i kamery Foxeer Falkor Mini. Do dzieła!
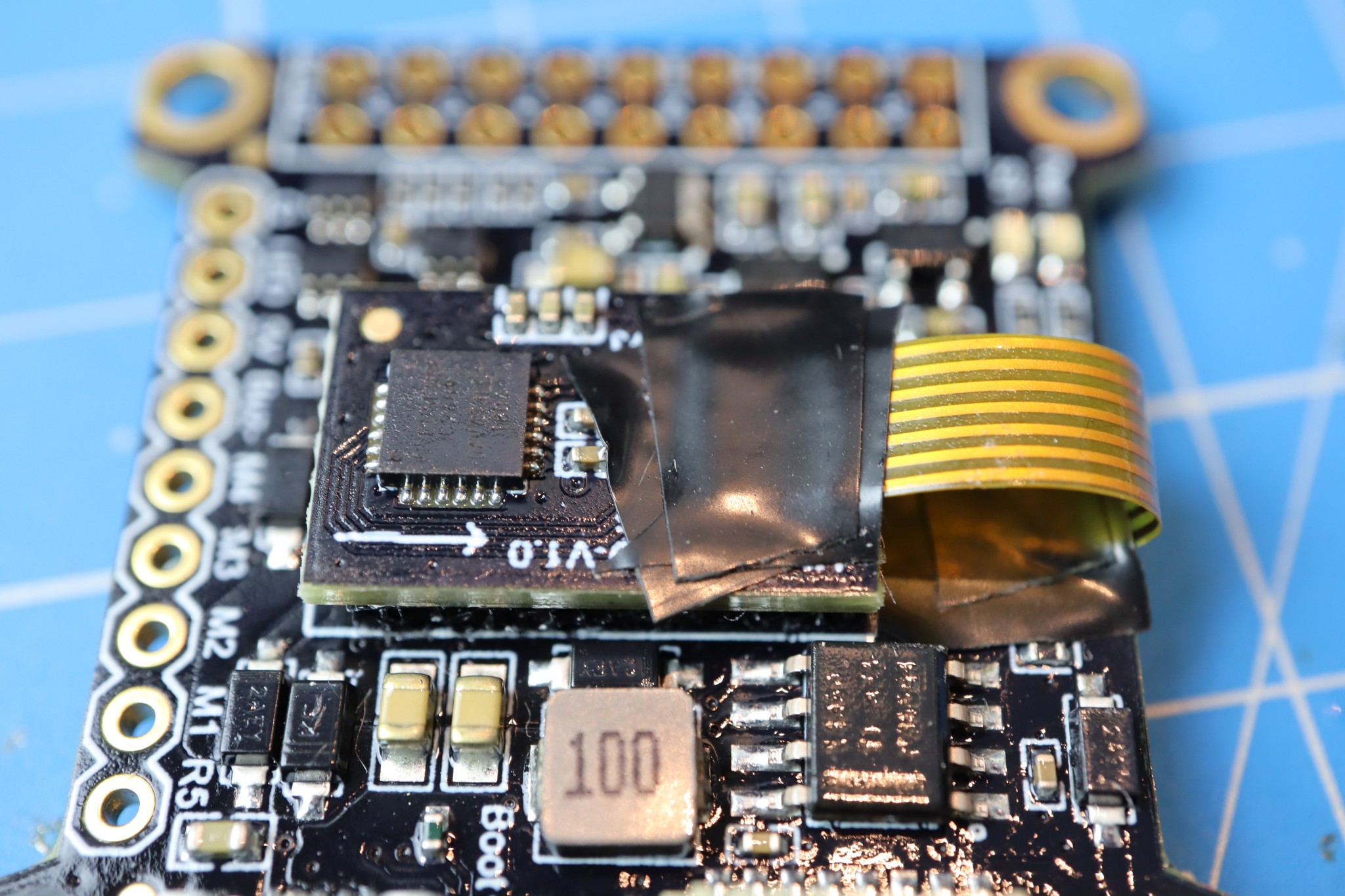
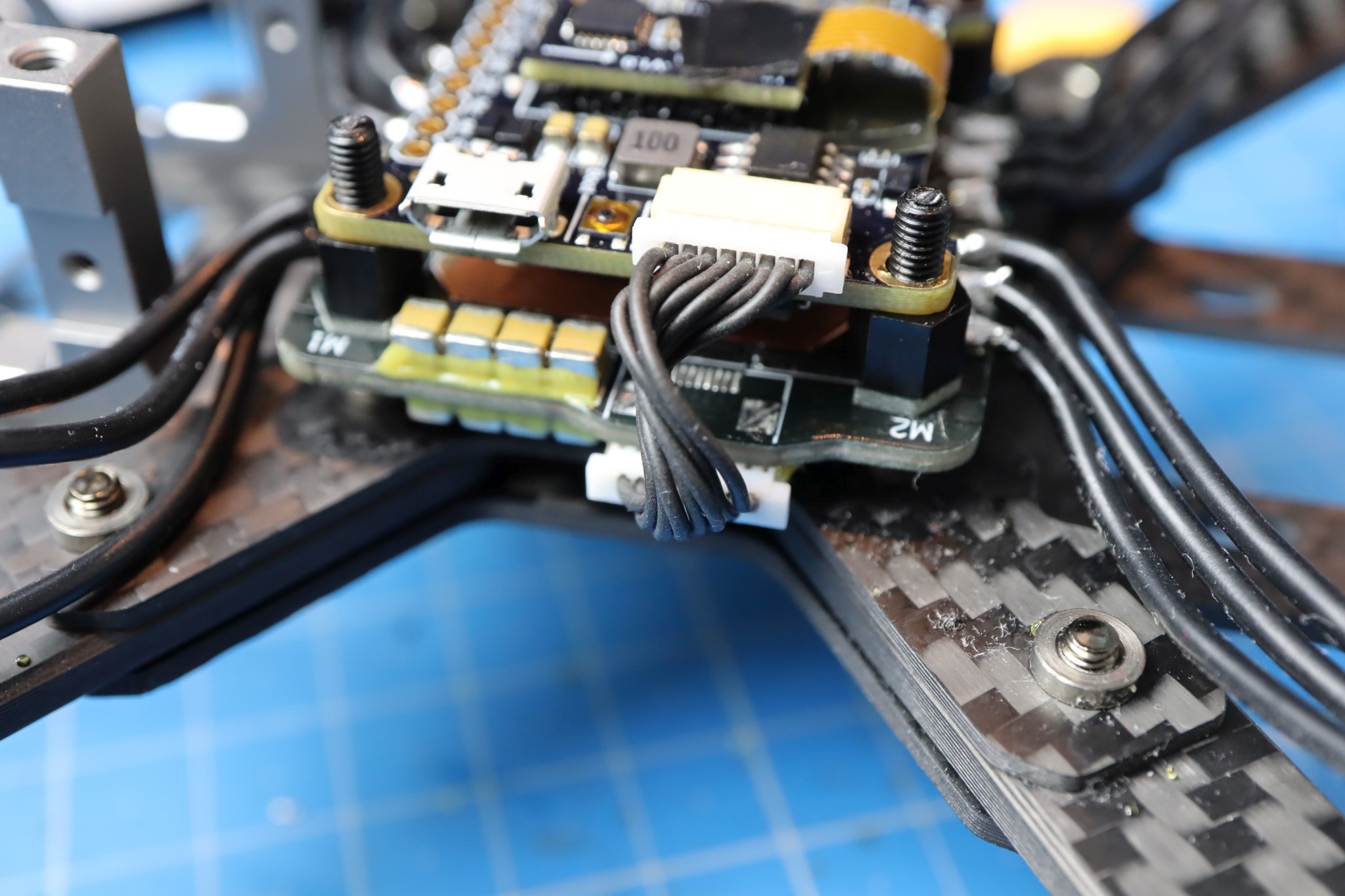
Kakute F4 V2 ma żyroskop wyprowadzony jako osobną płytkę, która połączona jest z pozostałą częścią elektroniki elastyczną taśmą. Nie jest to ewidentnie najtrwalsze połączenie, ale musiało być lekkie i nie wpływać na żyroskop.
Tym niemniej zdecydowałem się je nieco tylko wzmocnić podklejając taśmą izolacyjną oba punkty mocowania owego połączenia pomiędzy żyroskopem, a resztą kontrolera lotu. Moim celem było zabezpieczenie mechaniczne. Oczywiście nie uchroni to przed zerwaniem taśmy (w zestawie jest zapasowa), ale być może nieco wzmocni to połączenie. Dodatkowo same piny nie będą też odkryte. Zobaczymy, jak to się zachowa w trakcie użytkowania.
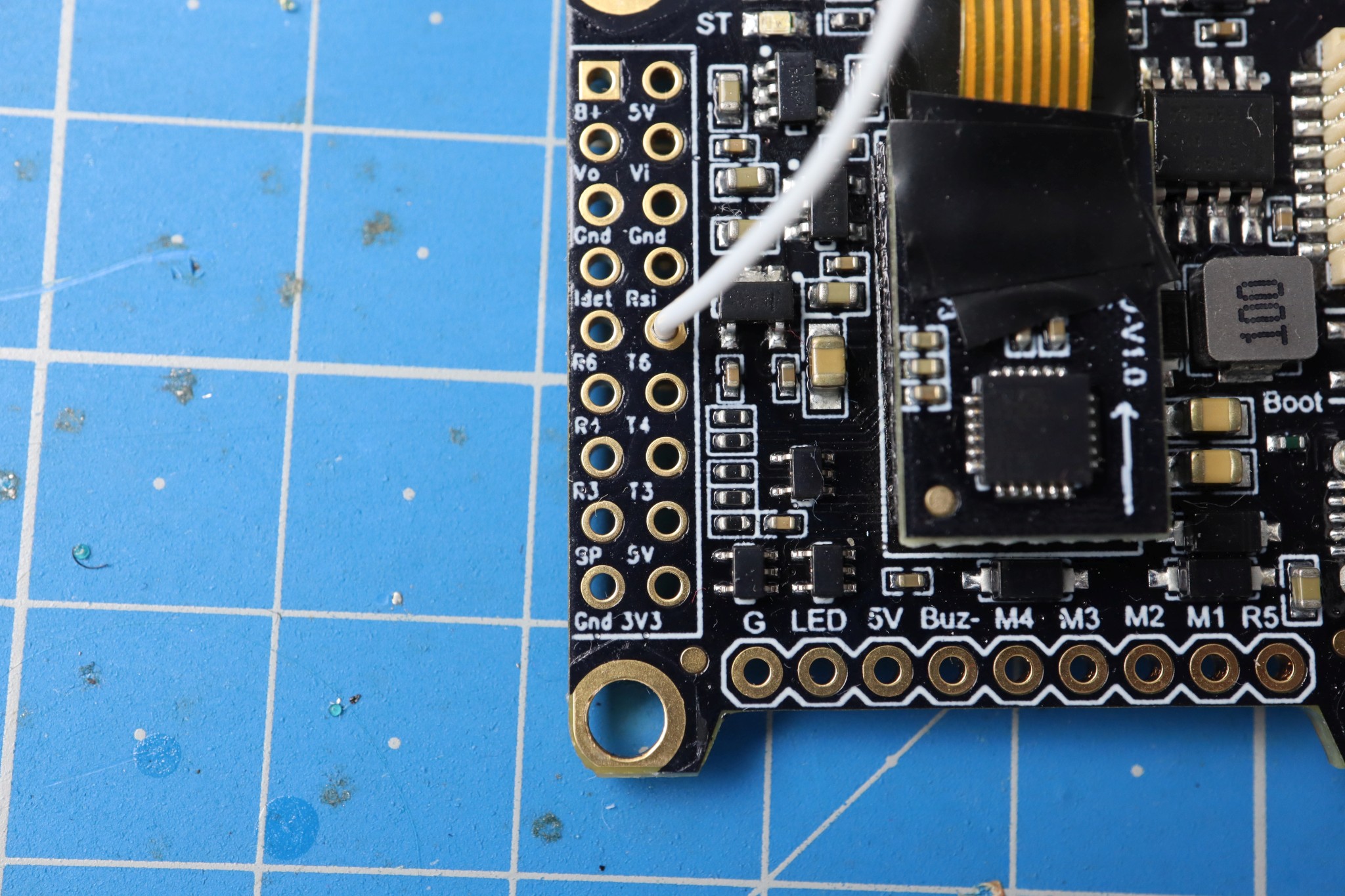
Spójrzmy na kontroler i zastanówmy się przez chwilę, jak poprowadzimy poszczególne połączenia. Po lewej stronie mamy następujące piny:
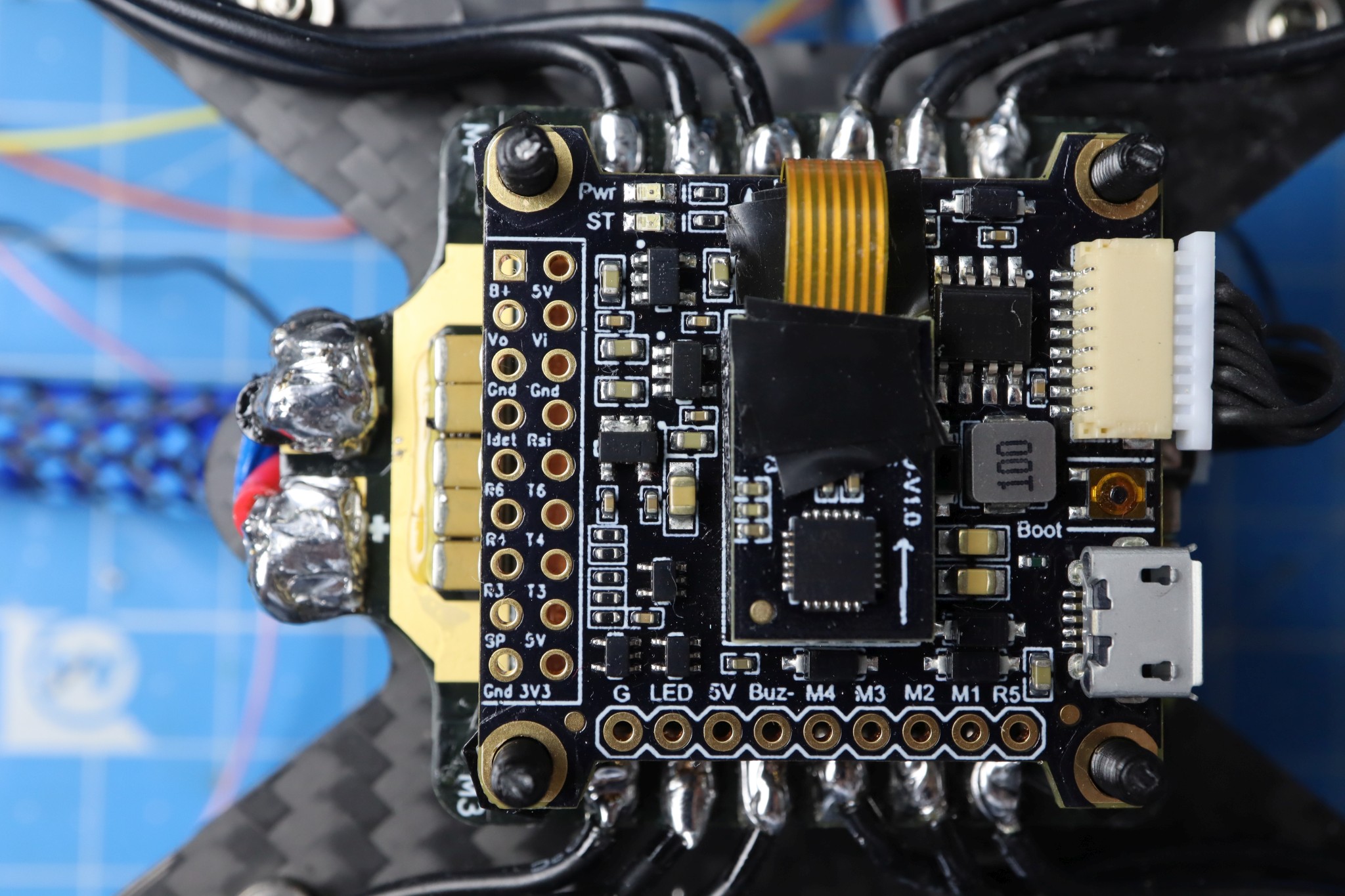
- B+ to bezpośrednie wyprowadzenie napięcia baterii. Przydatne, jeśli mamy urządzenie, które wymaga zasilania innego niż 5V (np. z zakresu 7-24V). W zamian musimy sami zagwarantować filtrowanie skoków napięcia.
- 5V - jedno z wielu wyprowadzeń napięcia z regulatora 5V na kontrolerze lotu. Należy pamiętać o maksymalnej obciążalności prądowej. Kakute ma wysoki limit - 1.5A, więc powinno z zapasem wystarczyć na wszystko łącznie z GPS i LEDami.
- Vo - wyjście wideo. Tym pinem będzie wychodził obraz po nałożeniu na niego OSD z kontrolera lotu. Do tego pinu podłącza się żółty przewód wideo od nadajnika FPV
- Vi - wejście wideo. Tędy obraz z kamery będzie wchodził do kontrolera lotu, aby nałożyć na niego OSD z kontrolera lotu. Tradycyjnie w tym miejscu podłączamy żółty przewód wideo od kamery.
- Gnd - uziemienie. Wszędzie tam, gdzie jest potrzebne jest zwielokrotnione i połączone z masą.
- Idet - wejście analogowe dla czujnika prądu spodziewa się poziomu napięć 0-3.3V, aby określić płynący prąd.
- Rsi - wejście analogowe dla poziomu sygnału, jaki "widzi" odbiornik RC. Tutaj również oczekiwany poziom napięć to 0-3.3V. FrSky XSR podaje go wraz z innymi parametrami poprzez SmartPort, więc nie będziemy z tego pinu korzystać.
- R/T 3,4,6 - są to piny nadawcze (T) i odbiorcze (R) poszczególnych złącz UART. Występują najczęściej w parach i tak np. UART6 w Betaflight to właśnie piny T6 i R6. Podobnie UART3 to T3 i R3 na płytce. Warto pamiętać, które urządzenie podłączyliśmy do którego UARTu, ponieważ podczas konfiguracji Betaflight będziemy musieli się do tego odwołać i przyporządkować poszczególne funkcje np. GPS do danego UART.
- SP - SmartPort - złącze z inwersją sygnału m.in. dla odbiorników FrSky, które posiadają SmartPort i podają dane telemetryczne do kontrolera lotu. Pozwoli to nałożyć na OSD (generowane przez układ na kontrolerze lotu) np. RSSI, czyli poziom sygnału sterującego. FrSky podaje sygnał odwrócony (ang. inverted) i z uwagi na to pinie SP jest automatyczne rozpoznawanie i konwersja sygnału, aby kontroler lotu był w stanie go zinterpretować. Gdyby tego zabrakło, pin nie obsługujący inwersji, nie byłby w stanie odebrać sygnału z odbiornika.
- 3V3 - wyjście zasilające z regulatora 3.3V. Jeśli jakieś urządzenie wymaga niższego napięcia niż 5V (np. GPS) to możemy je podłączyć pod to wyjście dające właśnie 3.3V, z uwagi na to, że kontroler lotu ma swój drugi regulator. On akurat daje się obciążyć maksymalnym prądem 200mA, więc tutaj akurat nie podłączymy zbyt dużo. Do GPS jednak wystarczy.
Na dole mamy też parę pinów.
- G - uziemienie, masa, to samo co GND poprzednio
- LED - wyjście sygnałowe do sterowania diodami opartymi o układ WS2812B. LEDy tego typu mają wejście DIN i wyjście DOUT, aby połączyć je z kolejnym, takim samym układem w szeregu.
- 5V - zasilanie 5V, najczęściej do LEDów albo do Buzzera, tutaj można je potraktować jako wspólne
- Buz- - Miejsce, w które lutujemy '-' od buzzera. '+' podłączamy do 5V. To poprzez ten pin kontroler lotu steruje dostarczaniem zasilania i w rezultacie piszczeniem buzzera.
- M1-4 - wejścia sygnałowe dla silników. Gdybyśmy używali osobnych ESC, albo nie korzystali z wtyczki z ESC 4w1, to do tych pinów musielibyśmy lutować kable, którymi biegłby sygnał sterujący do kolejnych regulatorów.
- R5 - jest to pin dla telemetrii ESC. Regulatory, które potrafią mierzyć swoje parametry, takie jak temperatura, czy natężenie płynącego prądu, mogą podawać odpowiednie dane na tym pinie. W przypadku ESC od Tekko, ten pin i tak jest wyprowadzony i dane są podawane jednym z przewodów z wtyczki połączeniowej pomiędzy ESC i FC
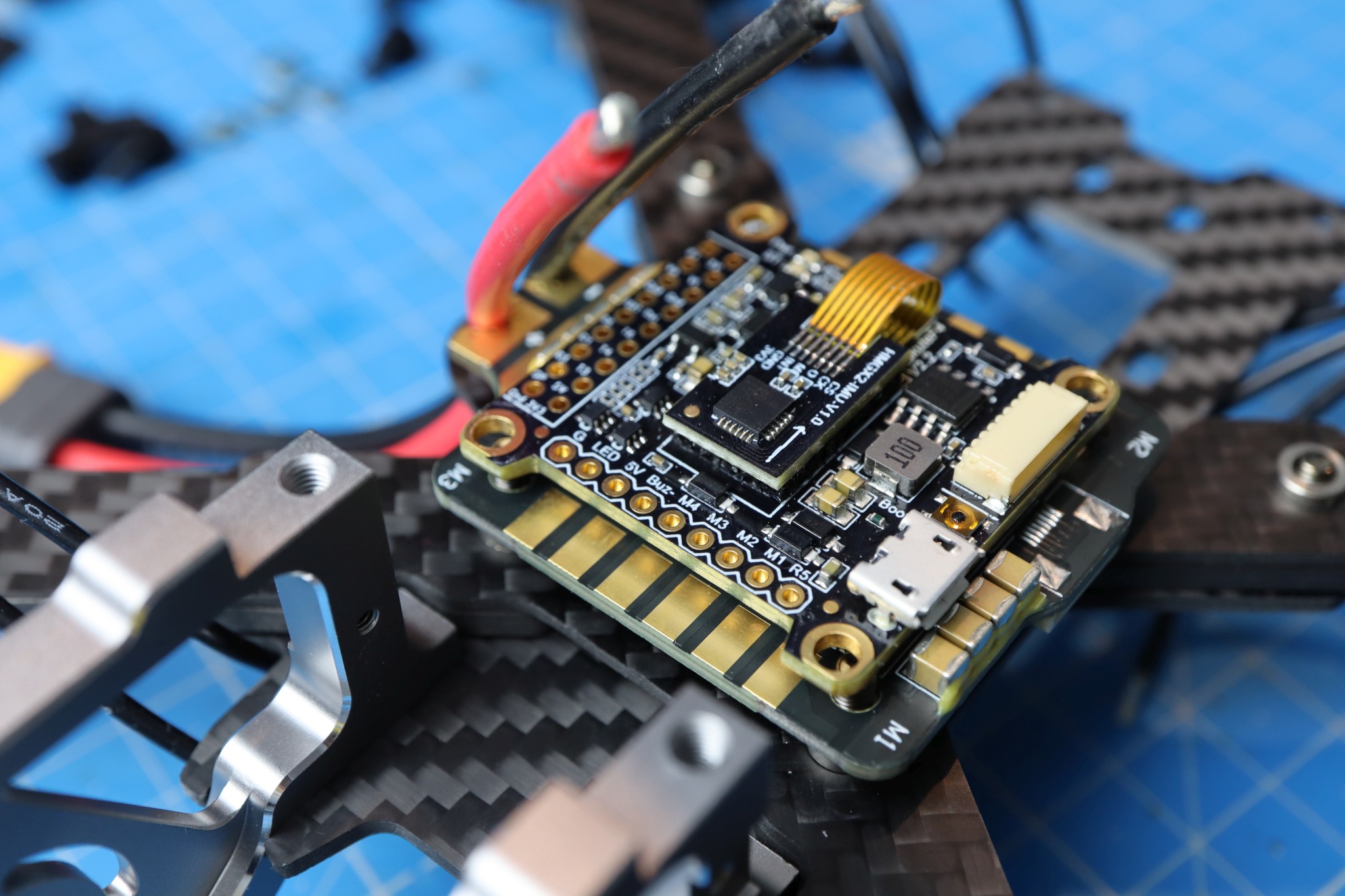
Zacznijmy od próbnego połączenia kontrolera lotu z regulatorem. Użyłem krótszego przewodu, który daje się wykorzystać, gdy oba gniazda znajdują się po tej samej stronie. Na tym etapie możemy po raz kolejny podłączyć baterię. Na kontrolerze lotu powinny zaświecić się diody. ESC z kolei powinny odegrać całą, dłuższą melodię. Wydłużenie dźwięku po podłączeniu FC wynika z tego, że w drugiej fazie ESC potwierdza otrzymanie prawidłowego sygnału sterującego - stąd dodatkowe nuty. Nawet na domyślnych ustawieniach kontroler lotu powinien używać protokołu, który "zrozumieją" regulatory, więc powinniśmy usłyszeć kompletną melodyjkę zagraną przez ESC (a dokładniej drgania silników, w które owe regulatory je wprowadzają).
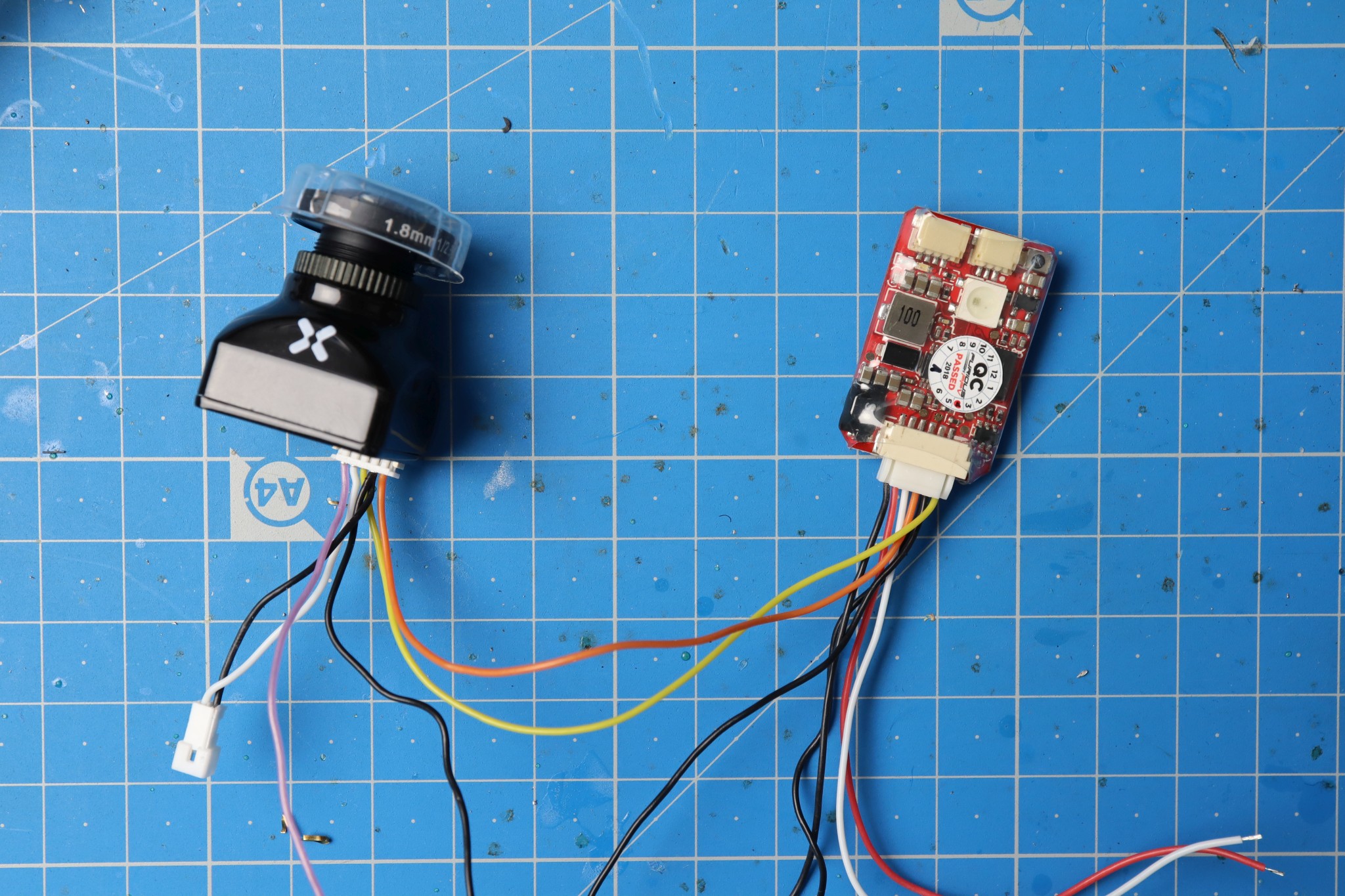
Samo organizowanie przewodów rozpoczniemy od podłączenia zestawu FPV. FuriousFPV Stealth (nadajnik) ma charakterystyczne gniazdo i wtyczkę - identyczne, jak stosowane w TBS Unify. Dodatkowo, w zestawie otrzymałem dwie wiązki przewodów zakończone wtyczkami. Z jednej strony każda z nich wchodzi do nadajnika (po lewej). Druga strona to wtyczka do kamery.
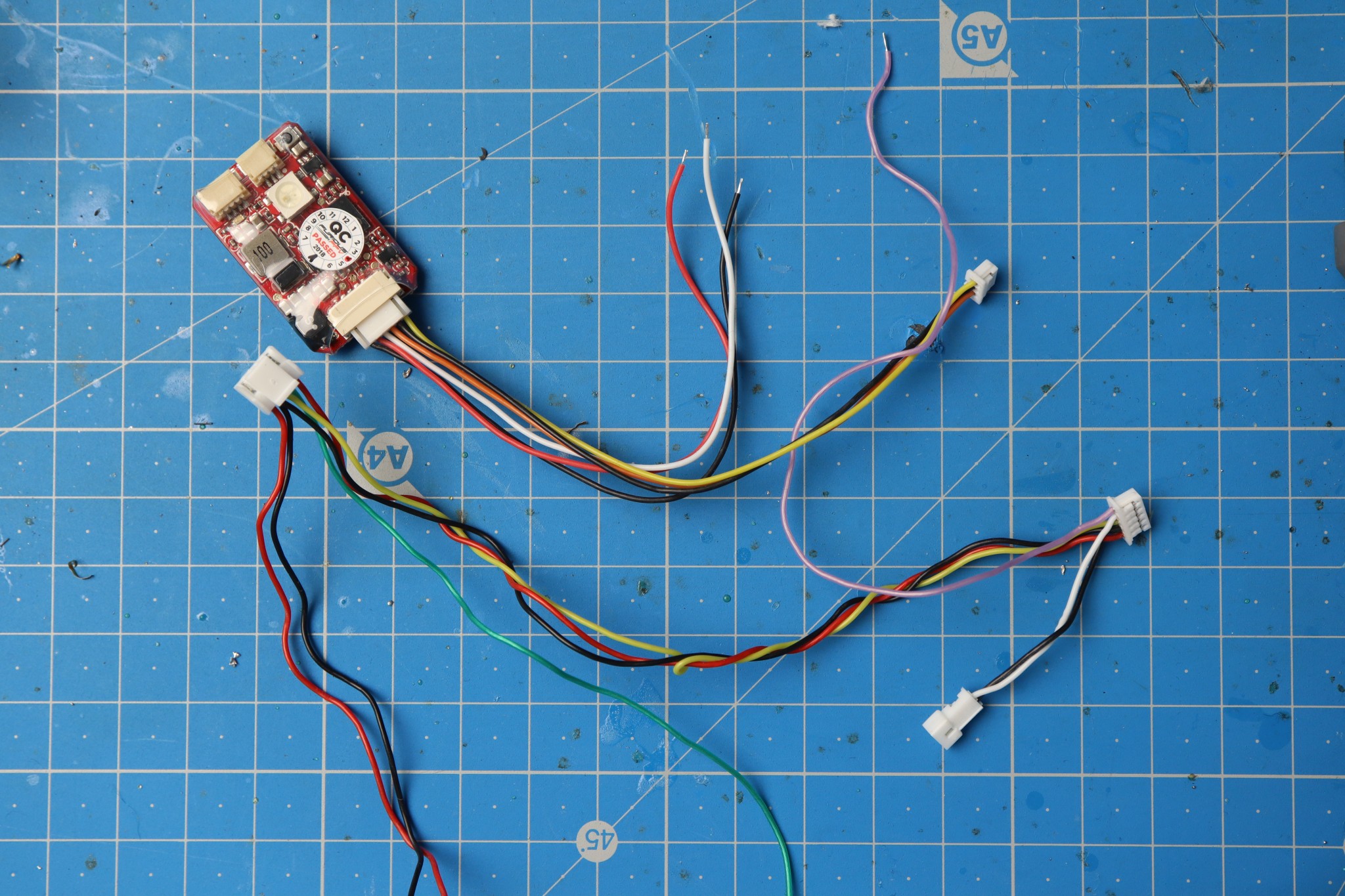
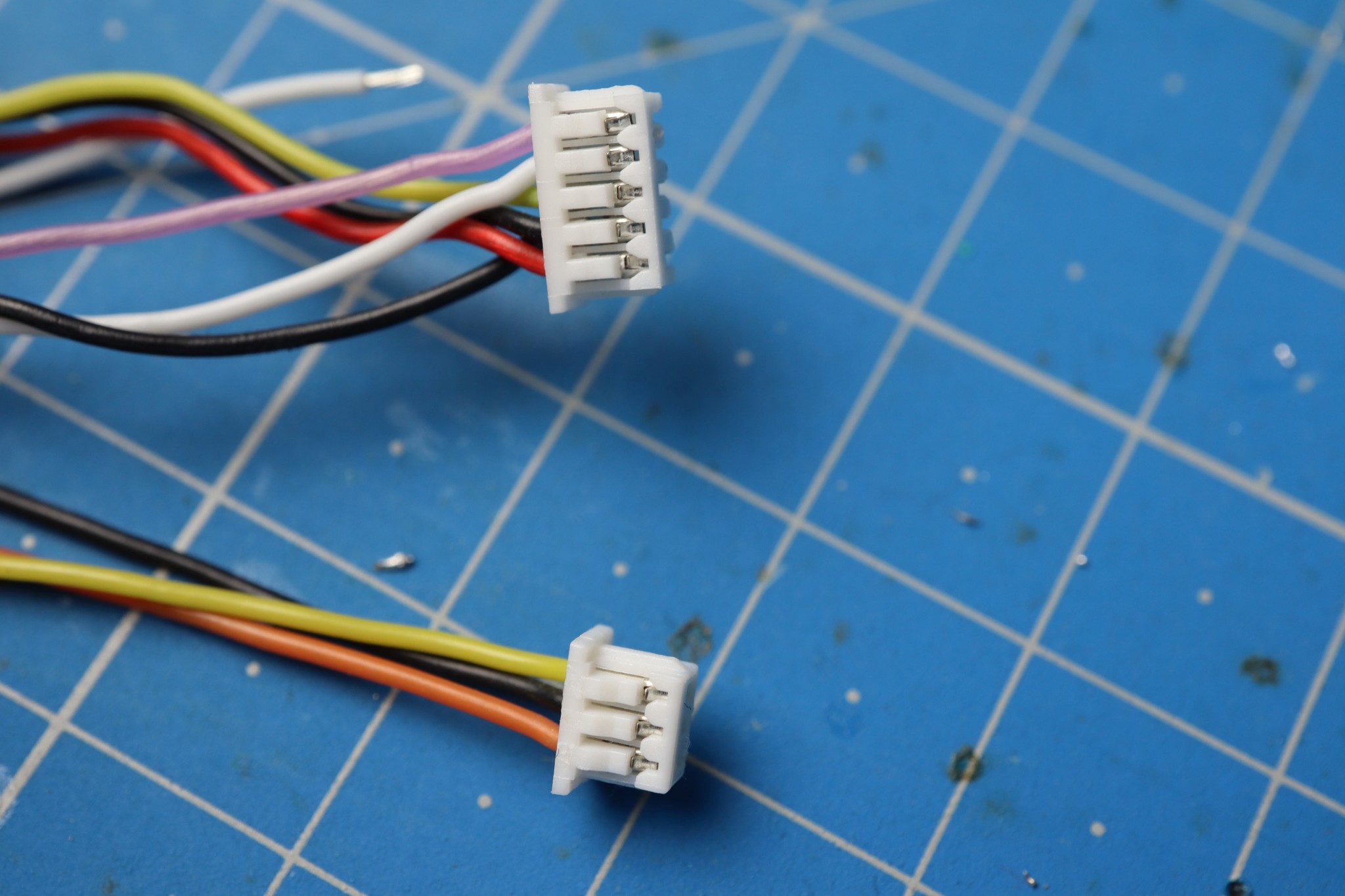
Producent oczywiście nie mógł wiedzieć, którego dokładnie modelu będziemy używać, ale w ogólności otrzymujemy 2 najczęściej stosowane. Z bliska widzimy, że ten dolny to minimum, jakiego potrzebuje każda kamera. Jest to zasilanie (czerwony i czarny przewód) oraz sygnał wideo (zółty). Drugi przewód jest dedykowany kamerom, które mają dodatkowego pilota do sterowania ustawieniami oraz mają OSD, na którym pokazują bieżące napięcie (pin VBAT). Dobrze się składa, ponieważ Foxeer Falkor Mini potrzebuje właśnie takiego złącza. Będzie mniej cięcia przewodów i ich lutowania!
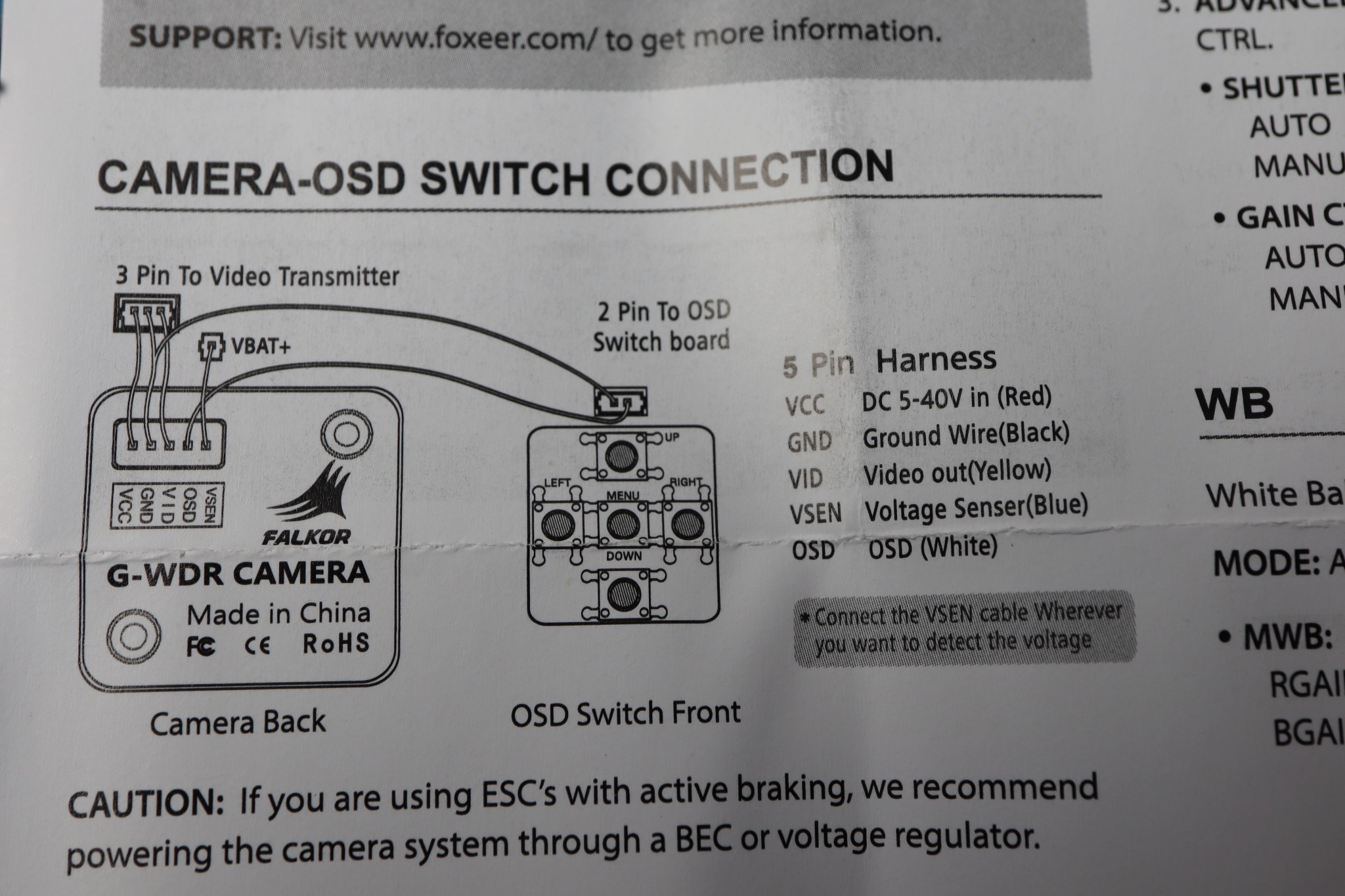
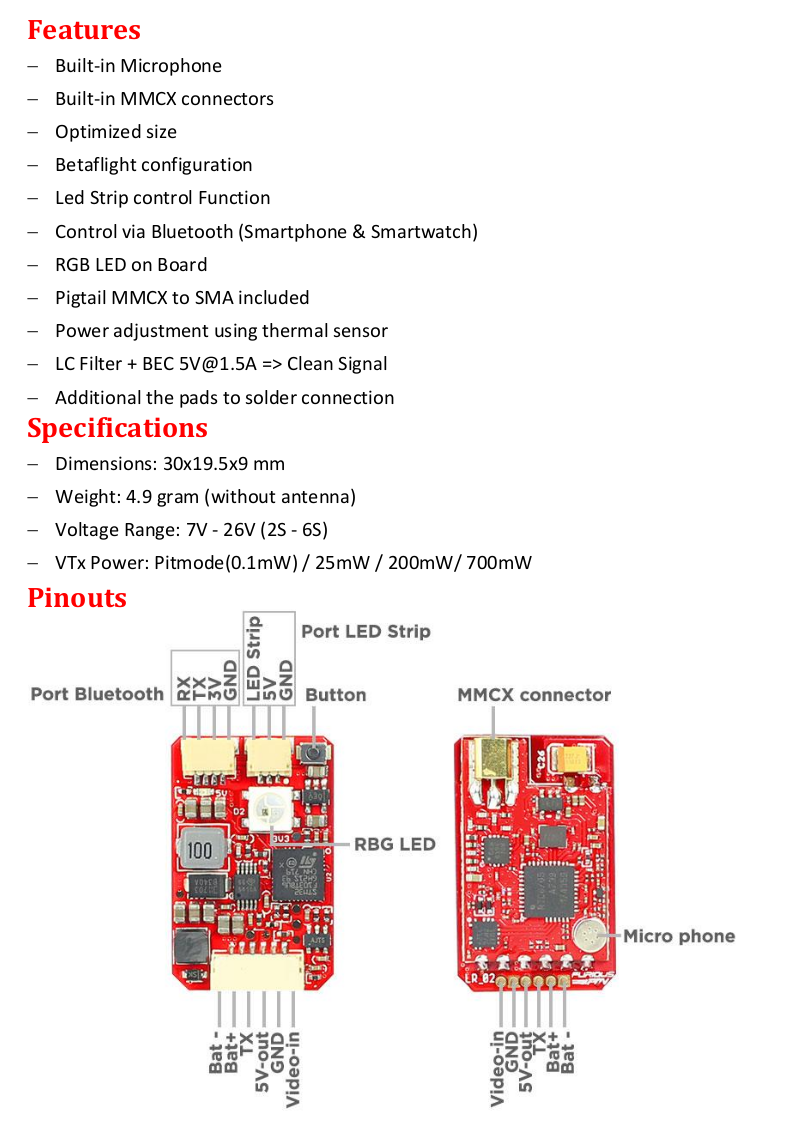
Zawsze warto jest zerknąć w instrukcję, nim zabierzemy się za dalszy montaż. Popatrzmy więc na opis kamery. To, co jest dla nas najważniejsze to ułożenie pinów oraz napięcie zasilające. Każde ze złącz jest dodatkowo szerzej wyjaśnione. Od lewej zaczynamy więc VCC, czyli napięciem zasilania (czerwony przewód). Jak widać kamera akceptuje od 5V do 40V, więc w zasadzie nie ma znaczenia skąd podamy zasilanie. Najlepiej będzie podłączyć kamerę wprost do nadajnika, który sam reguluje napięcie i przy okazji zmniejszy liczbę zakłóceń (np. poziomych pasów widocznych w trakcie lotu). Kolejny pin to oczywiście GND (czarny przewód), czyli uziemienie. VID to sygnał wideo, który wyprowadza kamera (zółty przewód). Następne to OSD, czyli wejście dla pilota do sterowania kamerą. Widać go też na zdjęciu. Jest on jednocześnie wpięty równolegle drugim kabelkiem w GND. Na końcu mamy VSEN, czyli wejście dla czujnika napięcia. Kabelek ten podłączamy gdziekolwiek, gdzie znajdziemy napięcie zasilajace wprost z baterii. Albo będzie to VBAT na kontrolerze lotu, albo wprost do miejsca, gdzie lutowaliśmy czerwony przewód zasilający od XT-60 (na ESC). Dzięki podłączeniu tego przewodu kamera będzie w stanie pokazywać bieżące napięcie baterii i będziemy wiedzieli, kiedy warto lądować. Warto pamiętać, że kontroler lotu też ma OSD i on też jest w stanie pokazać tą wartość. Jeśli więc nie podłączymy wejścia VSEN od kamery to nie będzie ona w stanie odczytać napięcia, ale z uwagi na to, że będzie ono i tak dostępne na OSD z kontrolera lotu, będziemy mogli po prostu wyłączyć pokazywanie tej wartości przez kamerę i jej własny miernik.
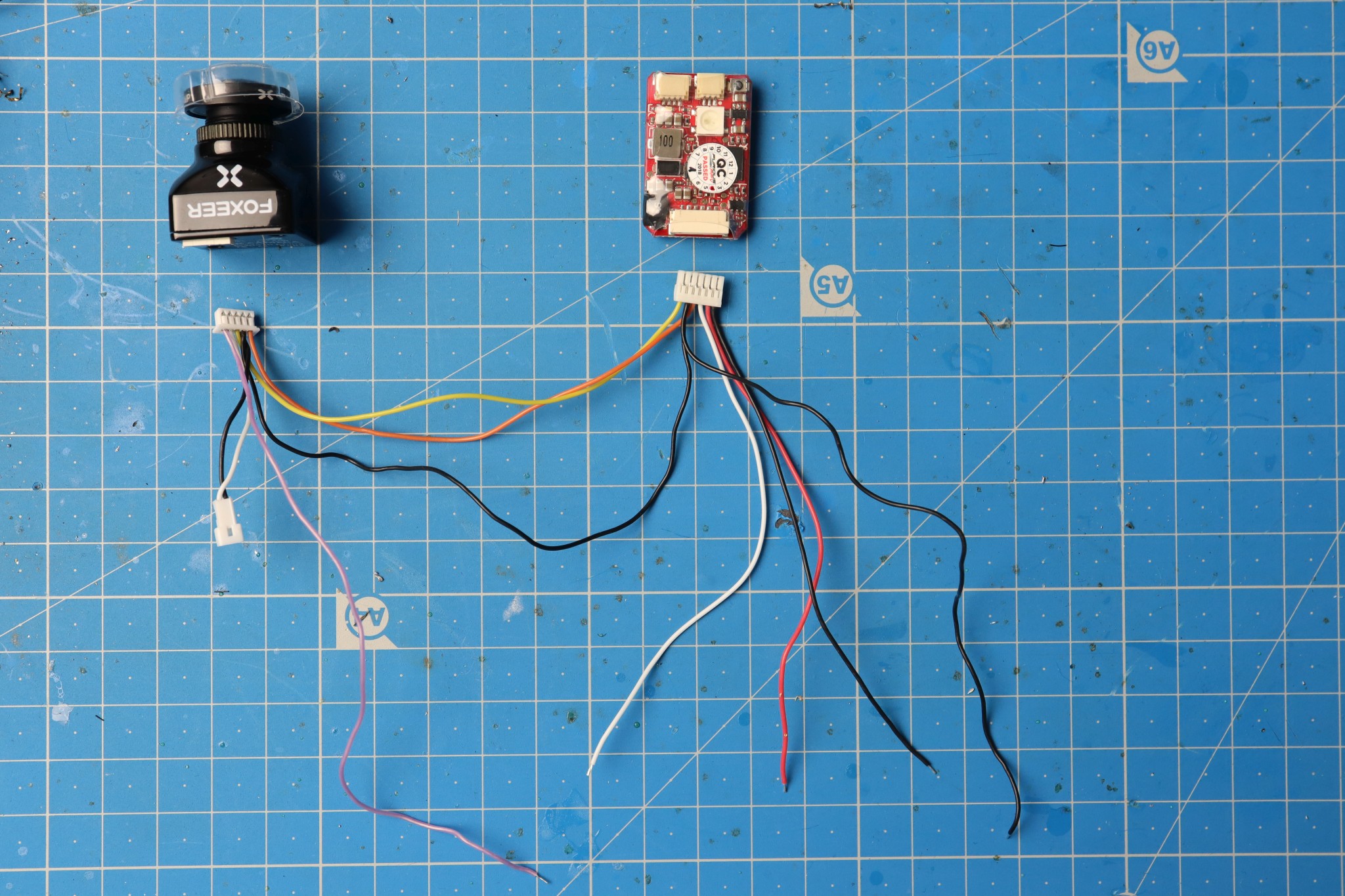
Część pracy naprawdę mamy już z głowy, bo kabelek dołączony do nadajnika FPV z gniazdami po obu stronach idealnie pasuje do naszej kamery. Gdyby było inaczej, po prostu należałoby zlutować niektóre przewody ze sobą. Im mniej lutowania tym lepiej i pewniej. Korzystajmy więc z takich uproszczeń.
Zwróćmy jednak uwagę, że i tak trochę polutować musimy. Z kamery wychodzi fioletowy przewód od miernika napięcia VSEN. Możemy go wyjąć z wtyczki i zignorować, albo przylutować do wejścia zasilania. Ja zdecydowałem się go zostawić, ale de facto nie będę z tej funkcji korzystał. Z kolei po stronie nadajnika FPV jest więcej luźnych przewodów. Mamy dwa przewody uziemiające - czarne. Czerwony to oczywiście zasilanie. Biały to z kolei SmartAudio, czyli pin, przez który będziemy sterować mocą, kanałem i pasmem nadajnika.
Jeśli chodzi o zasialanie to FuriousFPV Stealth pracuje w zakresie 7V-26V, czyli musimy podać napięcie wprost z baterii, albo regulatora 12V. Akurat Kakute F4 V2, jak i ESC Tekko nie posiadają tego ostatniego, więc pozostaje nam bezpośrednie zasilanie z Li-Po. Na szczęście BAT+ na kontrolerze akurat znajdziemy, więc tutaj pójdzie łatwo. Instrukcja podaje, że nadajnik FPV ma swój regulator 5V, dający do 1.5A, z filtrem LC, który dodatkowo eliminuje zakłócenia. W połączeniu z kondensatorem na wejściu, który wygładzi "szpilki" napięcia, całość powinna dać obraz bez poziomych pasów i innych nieprzyjemnych efektów.
No dobrze, to teraz pora zacząć łączyć ze sobą wszystko. Na pierwszy ogień idzie przewód od SmartAudio. Podłączamy go do jednego z pinów TX dowolnego UARTu. Z uwagi na to, że odbiornik trafi na UART3 z uwagi na to, że jest tam inwersja sygnału (przypominam, że odbiorniki FrSky podają odwrócony sygnał SBUS), to wykorzystałem UART6 i pin oznaczony jako T6. Na dobrą sprawę komunikacja jest dwukierunkowa, bo nadajnik także potrafi podawać swoją bieżącą moc i ustawienia, ale zgodnie z tym, jak obsługuje SmartAudio Betaflight, przypinamy się do pinu wyjściowego (TX), a nie odbierającego sygnał (RX).
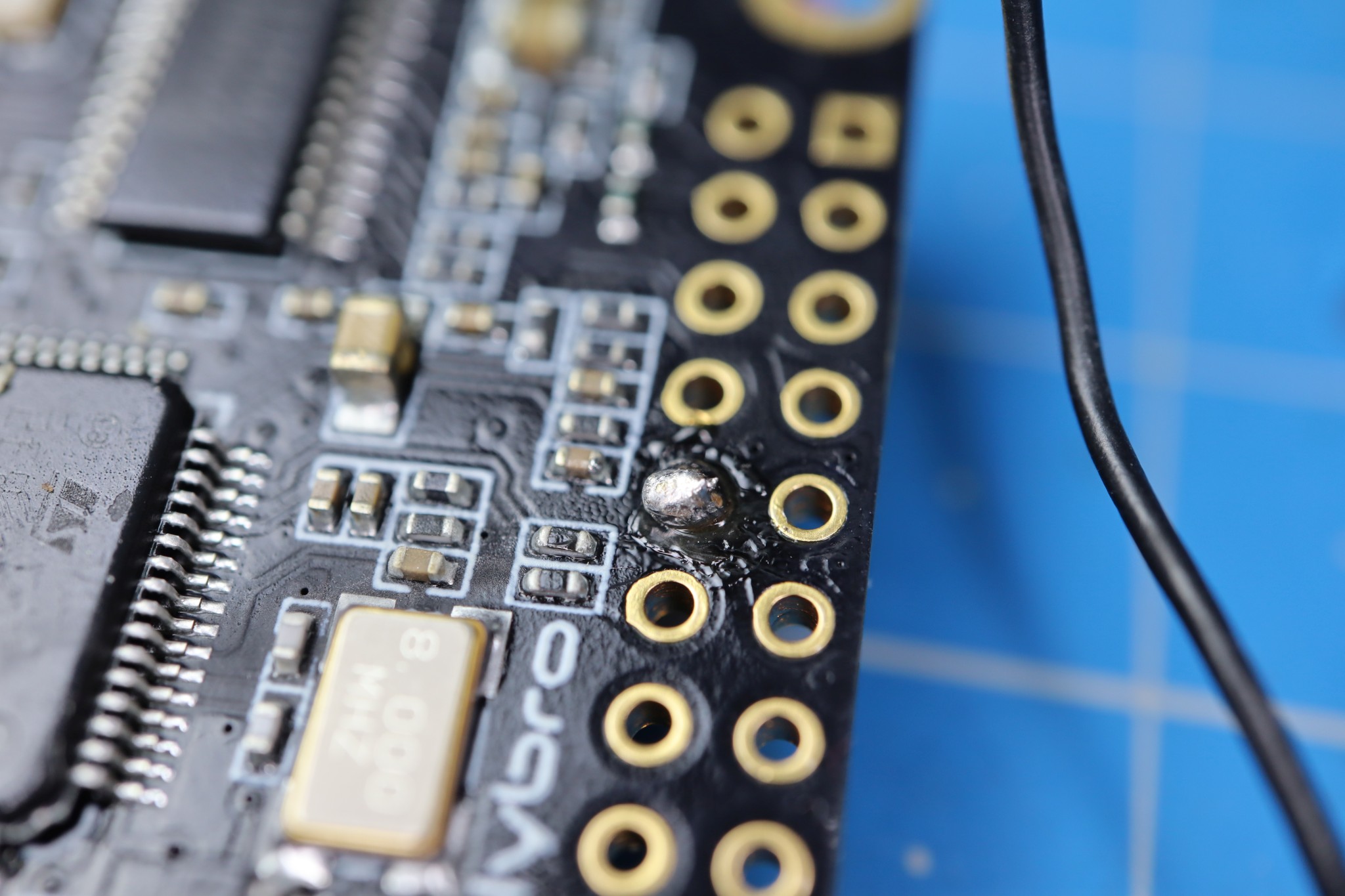
Nie będę wracał do samej techniki lutowania zbyt często, ale chciałem tylko zwrócić uwagę na to, że w przypadku otworów, w które możemy włożyć przewody, dobrą techniką jest zdjęcie izolacji na takiej długości, aby odkryta część minimalnie wystawała po drugiej stronie. Możemy wtedy luźne druciki plecionego przewodu lekko zagiąć i całość przylutować od spodu. Połączenie takie po pierwsze wygląda "czysto", bo u góry nie kładziemy cyny, a od spodu powstaje nam okrągły "bąbel", który przy okazji jest dość płaski i nie ma ostrych krawędzi, o którę mogłyby przetrzeć się pozostałe przewody.
Następnie zajmiemy się zasilaniem. Nadajnik zasilimy z wyjścia B+, czyli tam, gdzie dostępne jest na kontrolerze lotu napięcie samej baterii (w moim przypadku 4S, czyli 15.2V [4 * 3.8V]). Do tego pinu chcę też podłączyć miernik napięcia w kamerze. Wobec tego do płytki lutuję dwa przewody. Czerwony - zasilający od nadajnika oraz fioletowy - od kamery i złącza VSEN. W przypadku takiej operacji zdejmuję izolację z obu przewodów na nieco większej długości i staram się je możliwie ciasno skręcić ze sobą, nim przecisnę je przez otwór. Po drugiej stronie lutuję tak, jak poprzednio.
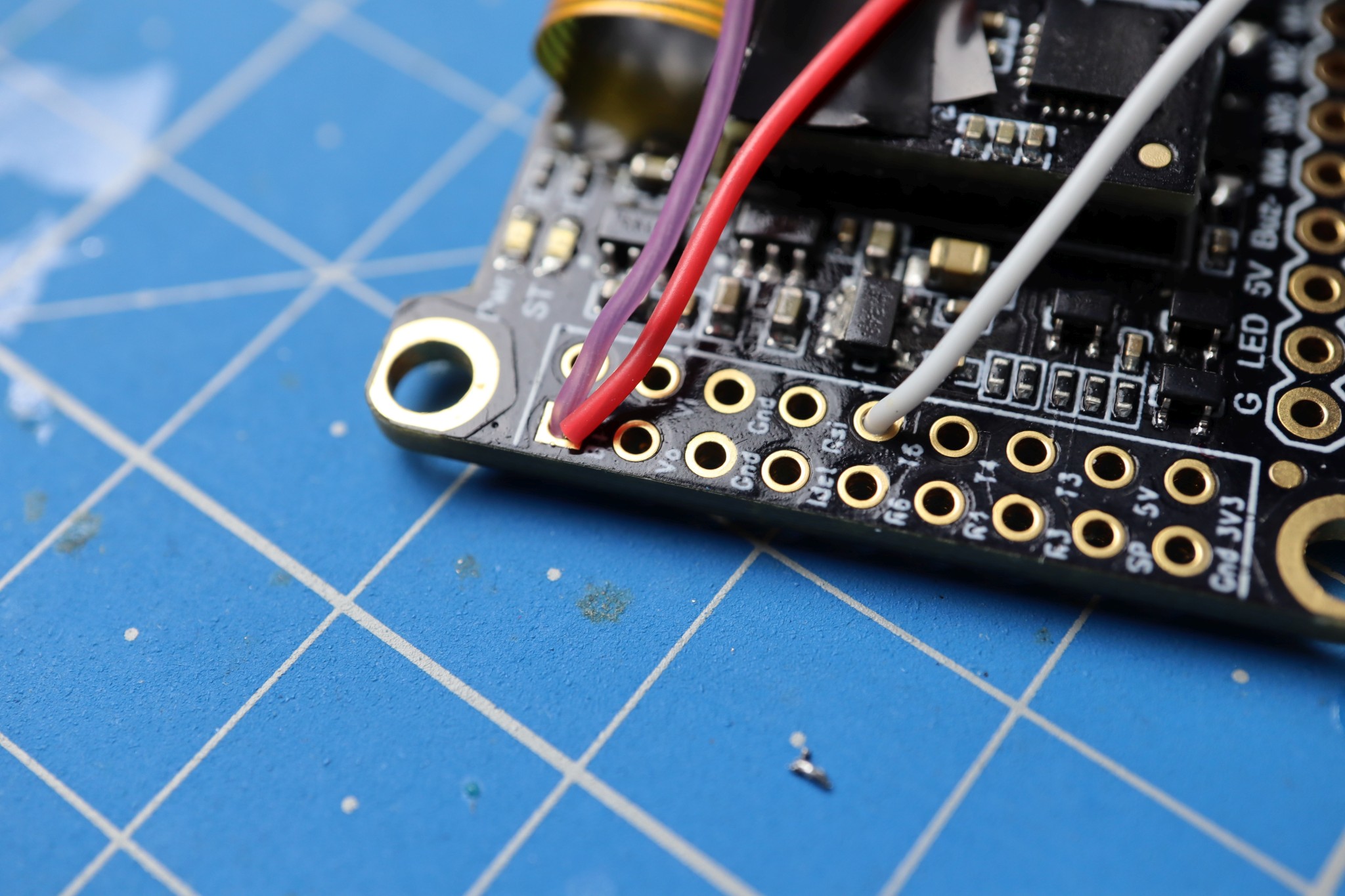
W podobny sposób wlutowałem też dwa przewody uziemiające - oba wychodzące z tej samej wtyczki nadajnika FPV. Użyłem pierwszego wolnego pinu "Gnd". Staram się, aby przewody od jednego urządzenia były możliwie blisko siebie, dlatego w tym, a nie innym miejscu. W przypadku konieczności wymiany i wylutowania - wiadomo mniej więcej, co do czego należy.
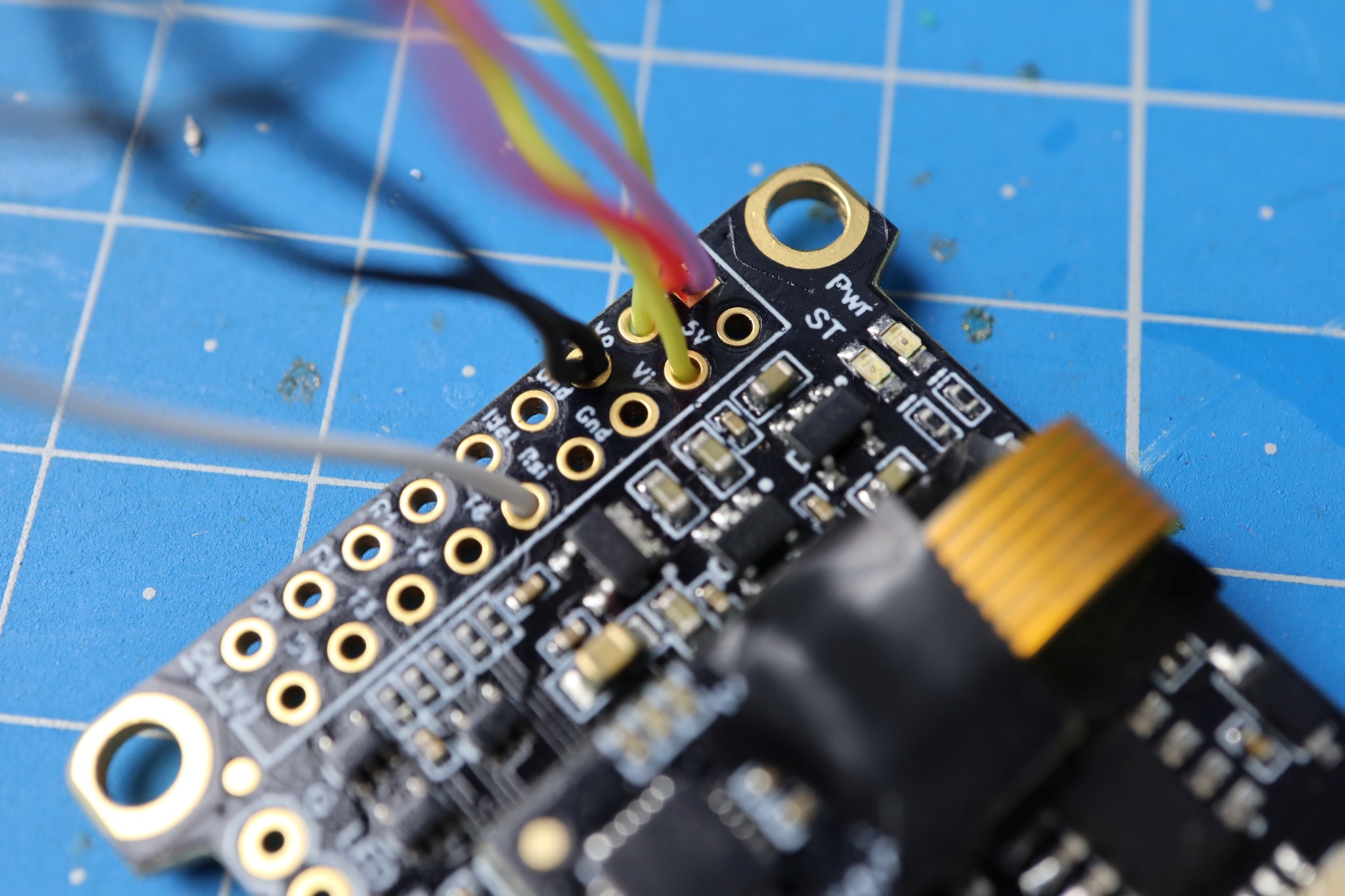
Pozostała jeszcze kwestia sygnału wideo. Przypomnijmy sobie wcześniejsze zdjęcie. Żółty przewód łączy kamerę bezpośrednio z nadajnikiem FPV. Oznacza to, że obraz z Foxeera będzie trafiał bezpośrednio do nadajnika i stamtąd do naszych gogli. Problem z tym rozwiązaniem jest taki, że pominiemy w ten sposób OSD, które jest na kontrolerze lotu. Kakute F4, jak w zasadzie już wszystkie kontrolery lotu pod BetaFlight, potrafi nakładać wiele parametrów na obraz z kamery. Musimy jednak podać mu na pinie "Vi" obraz z kamery. Stamtąd trafi do OSD, a po obróbce, pojawi się na wyjściu "Vo". Musimy więc rozciąć żółty przewód łączący kamerę i nadajnik. Przymierzcie wcześniej, gdzie znajdzie się nadajnik i kamera, aby wykonać cięcie w dobrym miejscu, bo nie zawsze pośrodku to właściwa lokalizacja. Warto się też upewnić, że mamy lekki zapas długości samego przewodu.
Po rozcięciu zółtego przewodu musimy wlutować obie wolne końcówki do kontrolera lotu. Jak już wspominałem, kabel idący od kamery trafia do "Vi". Z kolei część, która biegnie do nadajnika FPV musi zostać dolutowana do "Vo". Tym sposobem sygnał po przetworzeniu (nałożeniu dodatkowych informacji, takich jak napięcie baterii, ostrzeżenia, RSSI itd.) obrazu przez moduł OSD, sygnał zostanie wyprowadzony do nadajnika, który następnie dostarczy go do naszych gogli.
Uff, no to tyle na początek przygody z Kakute F4 V2. Jeszcze trochę lutowania przed nami, ponieważ brakuje jeszcze odbiornika, GPSu, a także buzzera i LEDów, które będą oświetlały kopter. To już jednak w kolejnej części. Do zobaczenia!
{kind=link}