Zbliża się jesień, po niej przyjdą w końcu mrozy i trzeba będzie się powoli chować z kopterami pod dach, albo używać specjalnej mufki do trzymania aparatury zimą :) Z uwagi na moje bardzo pozytywne doświadczenie z Kingkongiem 8X, a jednocześnie fakt, że ma już nowego, bardzo zadowolonego właściciela, musiałem znaleźć dla siebie coś nowego. Apetyt rośnie w miarę jedzienia, więc koniecznie chciałem go sparować z Taranisem X-Lite, a więc musiał mieć odbiornik FrSky. Ponadto zechciałem mieć OSD, które pokaże mi stan baterii, kontroler lotu oparty na procesorze F4 (skoro już są) oraz możliwość wlutowania własnej anteny FPV. W momencie zakupu bardzo blisko tych wymagań był Beta85, ale wtedy jeszcze był sprzedawany z FC F3. Zdecydowałem się więc na zakup wszystkich części osobno, co zresztą wyszło niewiele drożej, niż złożony komplet. Przy okazji stwierdziłem, że opiszę i obfotografuję cały proces i go dla Was opiszę! O ironio, niewiele po złożeniu zamówienia, Beta85 został odświeżony poprzez dodanie kontrolera lotu na procesorze F4 i nadajnik o mocy do 200mW (Z02). A do mnie przyszedł komplet części. No nic - do roboty!
Opis części
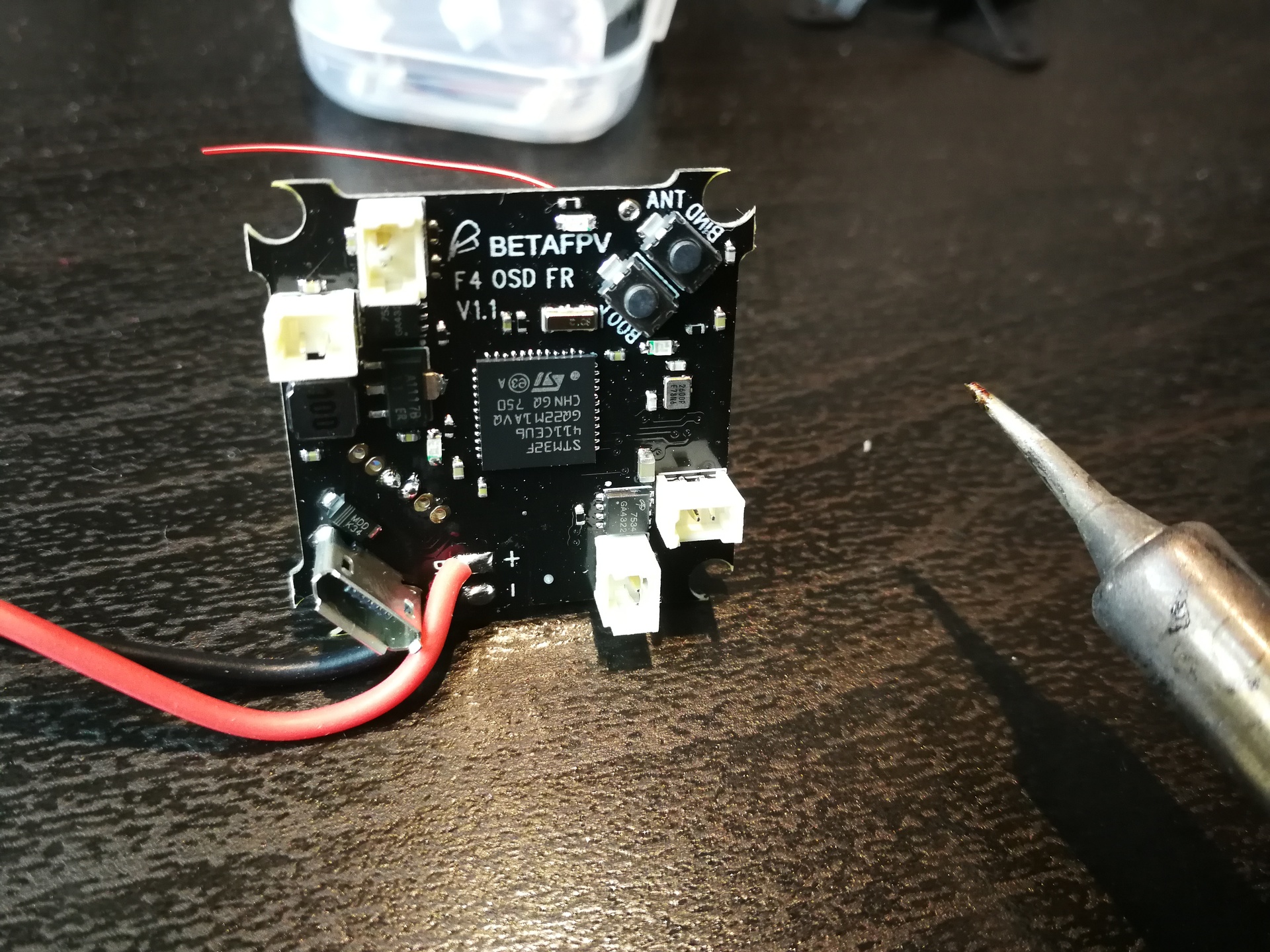
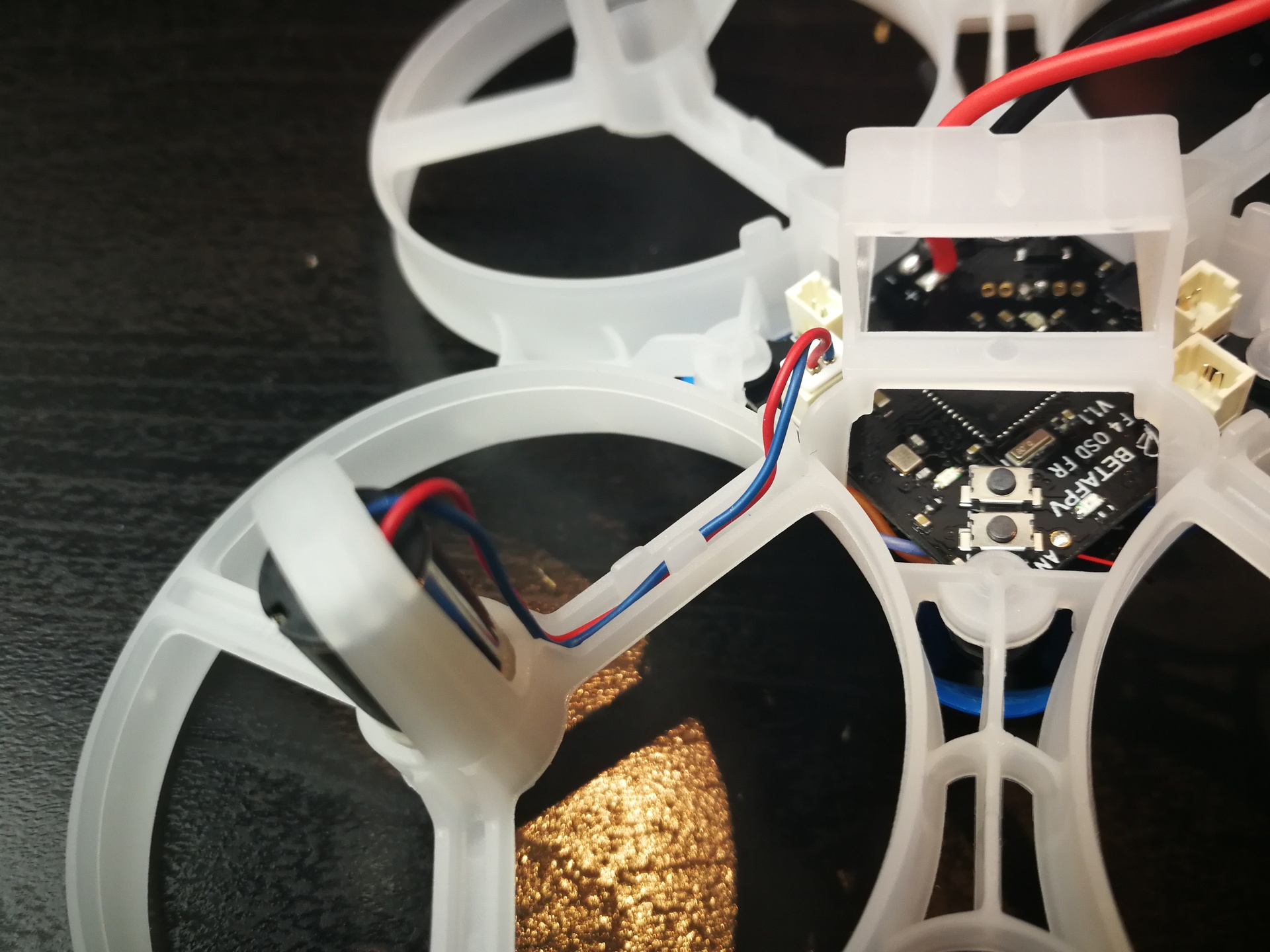
- Kontroler lotu: F4 Brushed Flight Controller (OSD + FrSky RX). Założenia wcześniej już wspomniałem. Urokiem tego kontrolera lotu jest to, że ma zintegrowany odbiornik FrSky. Tym samym całość staje się lżejsza, gdyż w innym razie musiałbym użyć XM, który nie jest oczywiście duży, ale jednak zajmuje miejsce.
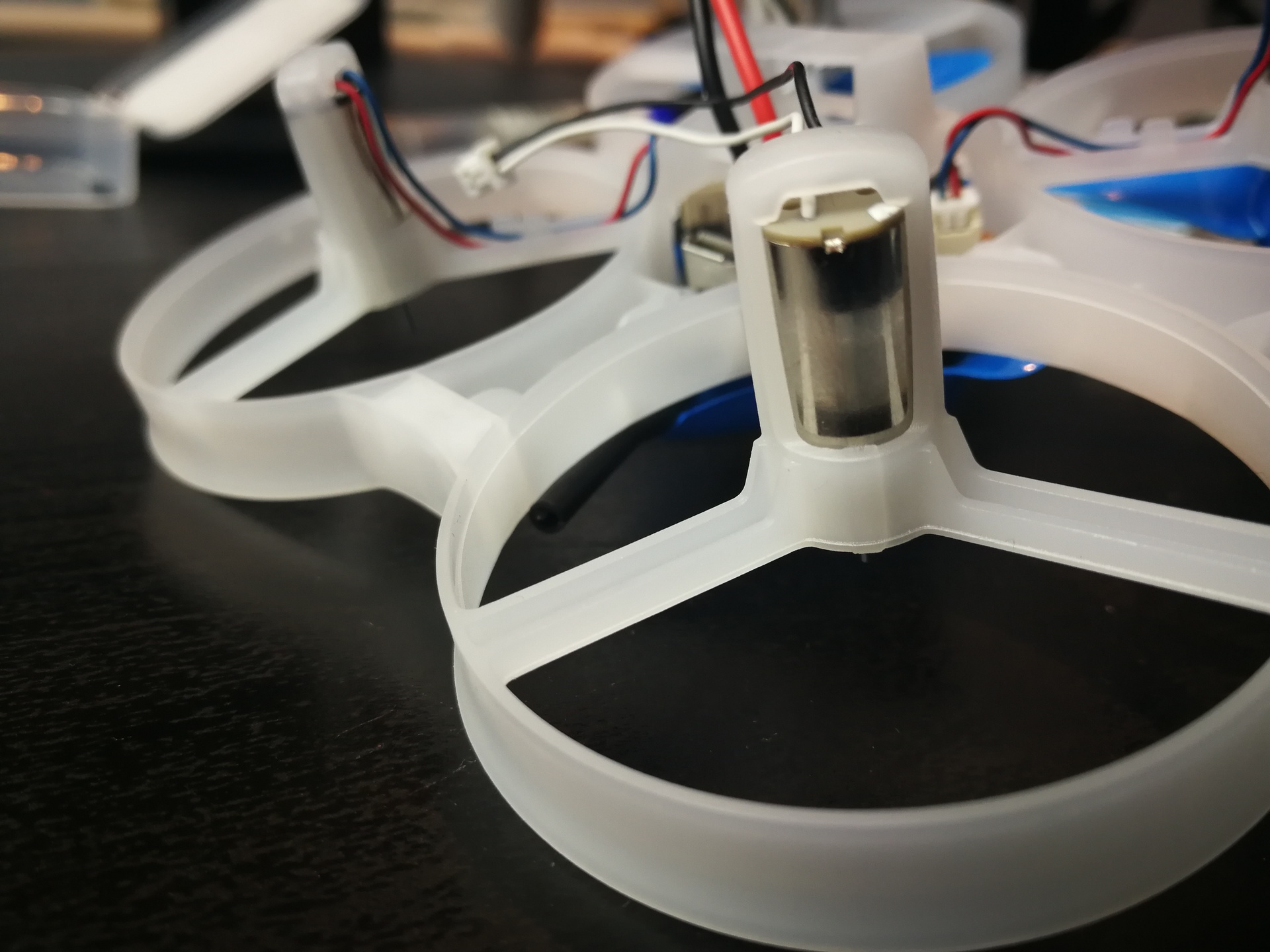
- Silniki: 8.5x20mm 16000KV Brushed Motors (2CW+2CCW). Motor o tej średnicy jest największym, jaki możemy dostać w tym kształcie - walcowatym. Rozmiar ten spotkałem w Hubsanie H107C i pamiętam, że różnica mocy pomiędzy nim, a jednostką 7mm była ogromna. Od tego czasu pojawiły się, przynajmniej częściowo, oznaczenia prędkości obrotowej (np. tutaj jest 16.000KV), co uprościło nieco wybór i pozwoliło rozróżnić silniki o innych specyfikacjach. Do modelu 85mm nie wyobrażam sobie mniejszej jednostki, ponieważ w moim odczuciu wtedy po prostu brakuje im mocy przy niektórych manewrach. Tutaj mamy nieco większy pobór prądu, ale kosztem naprawdę świetnego ciągu.
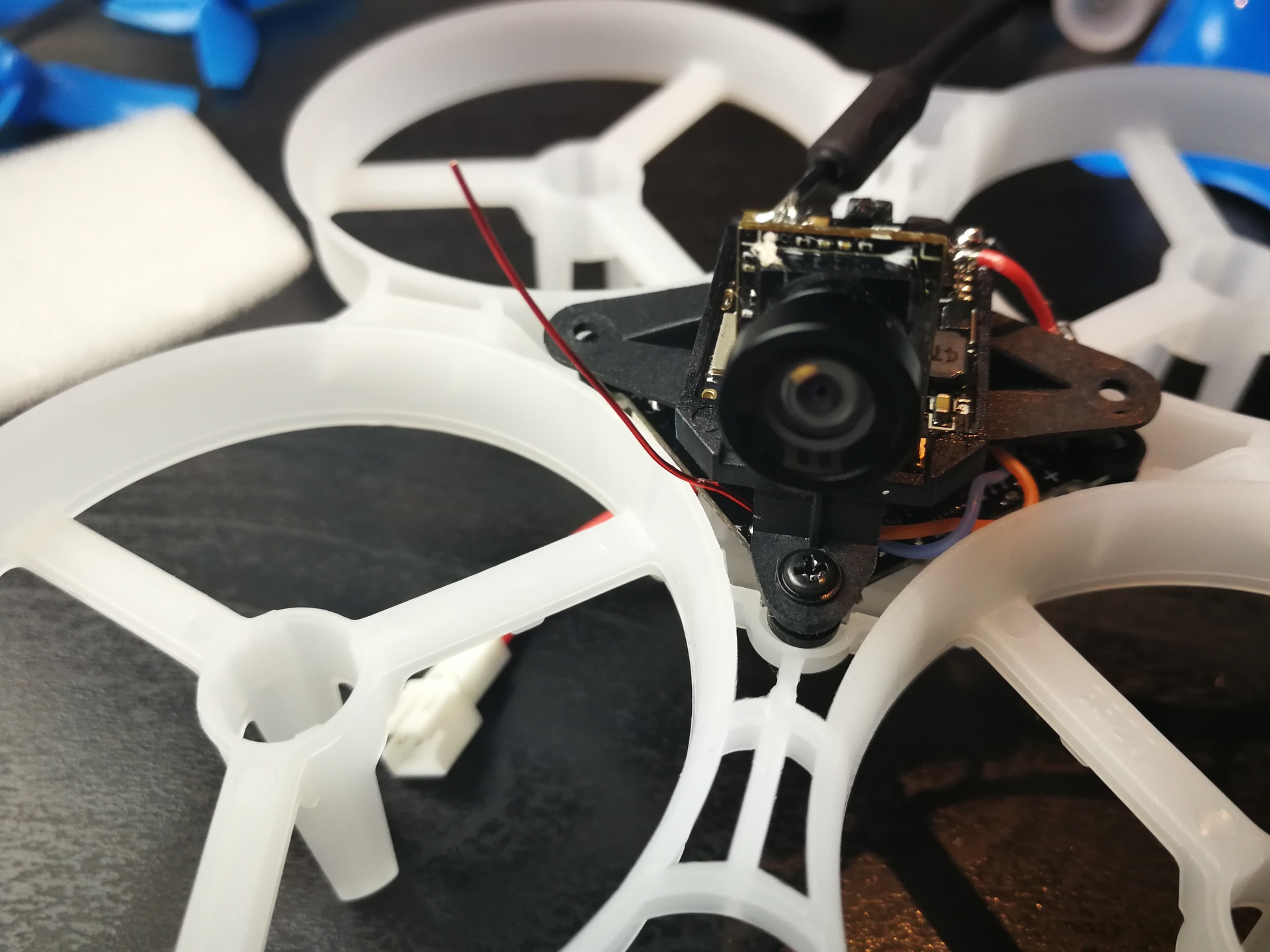
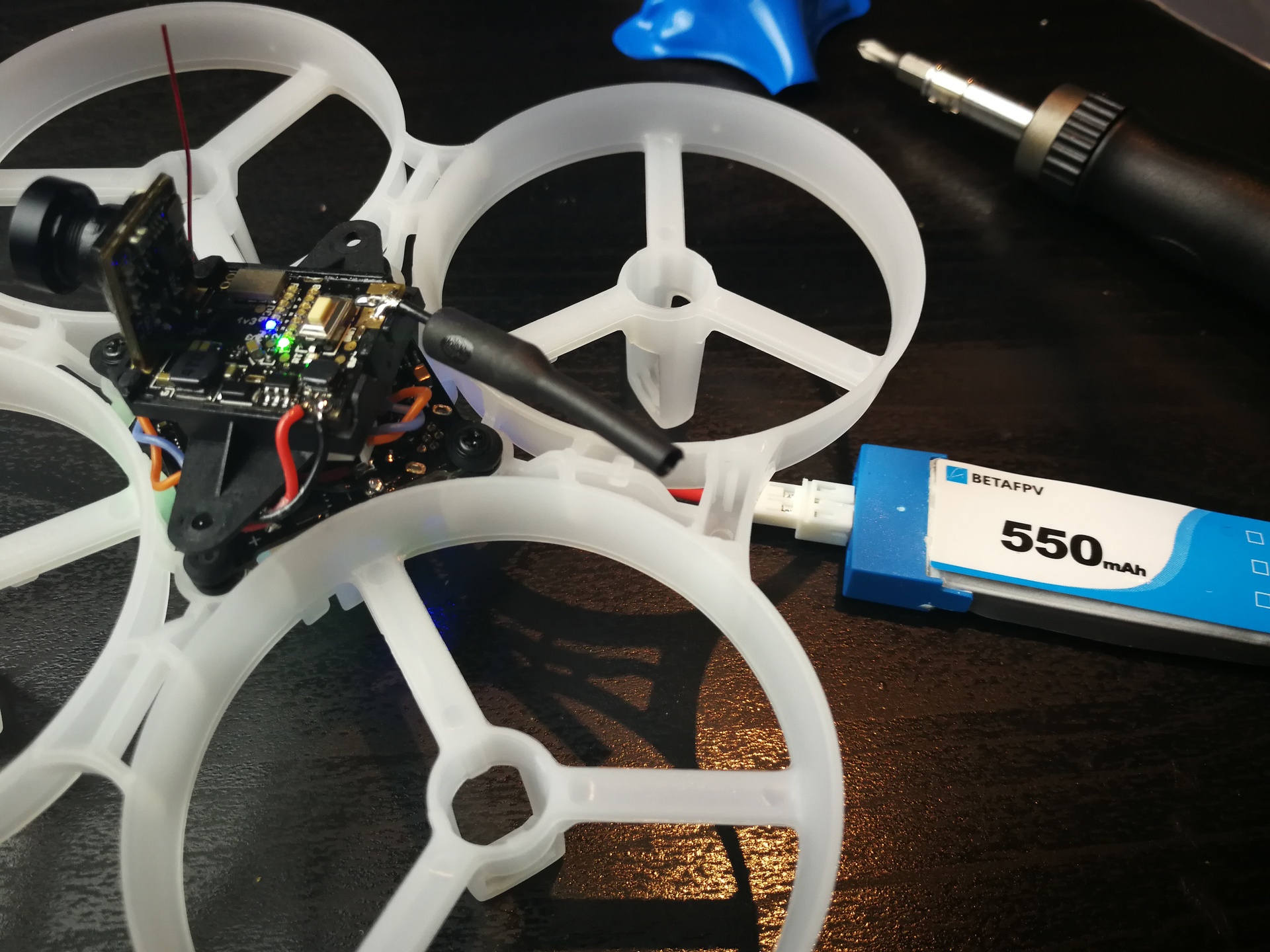
- Kamera i nadajnik: Z01 AIO Camera 5.8GHz 25mW - W ofercie BetaFPV są gotowe komplety - kamera oraz nadajnik. Ma to oczywiście sens, ponieważ w środku nie ma zbyt wiele miejsca na wrzucanie każdej płytki osobno. TBS Unify Pro Nano nieco zamieszał w tym względzie, ale to inna półka cenowa. Zaletą kompletu Z01 jest dobra, szerokokątna kamera, która sprawdza się nawet o zmierzchu. Jest ona zamocowana pod kątem 20 stopni i na sztywno połączona z nadajnikiem. Ten ostatni leży płasko na specjalnym mocowaniu, dzięki czemu antena FPV może wychodzić wzłuż osi koptera, co z kolei sprawia, że trudniej jest ją uszkodzić. Dodatkową zaletą takiego ułożenia jest fakt, że tymi samymi śrubkami mocujemy jednocześnie kamerę z nadajnikiem oraz kontroler lotu. Dodatkowe zalety Z01 to obsługa wszystkich 40 kanałów 5.8GHz (5 pasm), zmiana ich ustawień jednym przyciskiem i czytelne wyświetlanie tego wybranego za pomocą dwóch rzędów diod. Dodatkowo możemy przylutować łatwo inną antenę (dość duże pady, więc jest to łatwe). I na końcu wreszcie, mamy wyprowadzone przewody dla OSD, więc wystarczy tylko podpiąć się do kontrolera lotu, aby uzyskać podgląd podstawowych parametrów bezpośrednio na obrazie w goglach.
- Baterie: BetaFPV 1S 3.8V HV Li-Po 550mAh - jedna z najważniejszych rzeczy decydujących o tym, jak dobrze będzie latał kopter. Pakiet, który nie jest w stanie dostarczyć wystarczającego prądu do silników, będzie powodował nagłą utratę mocy i w rezultacie niekontrolowane opadanie koptera, szczególnie przy ostrzejszych manewrach. Dodatkowo w przypadku baterii 1S, jej wersja HV (ang. High Voltage) o napięciu znamionowym 4.35V zamiast 4.2V daje nam dodatkową "górkę", jeśli chodzi o końcową moc silników i krzywą rozładowania. We wszelkiego rodzaju niewielkich kopterach gra to niezwykle dużą rolę i może wpłynąć na nasz odbiór tego, czy kopter "lata dobrze". Z tego względu wybrałem pakiety od producenta reszty części, czyli BetaFPV. Po pierwsze mają one całkiem wysoką pojemność, po drugie są HV, a po trzecie ich "C" jest na tyle wysokie, że szczotkowe silniczki o średnicy 8.5mm nie są w stanie jej przeciążyć. Mówię to z całą stanowczością, bo mająć OSD widzę, jak zachowują się Gaoneng 4.35V 450mAh, które od startu pod obciążeniem mają niższe napięcie, które pod koniec ich pojemności gwałtownie spada, w odróżnieniu od tych od BetaFPV, które stabilniej trzymają się pod obciążeniem, a okres między komunikatem "Low Battery", a "Land now" wyraźnie pokazuje, że również krzywa rozładowania jest łagodniejsza i łatwiej ocenić, ile lotu nam pozostało.
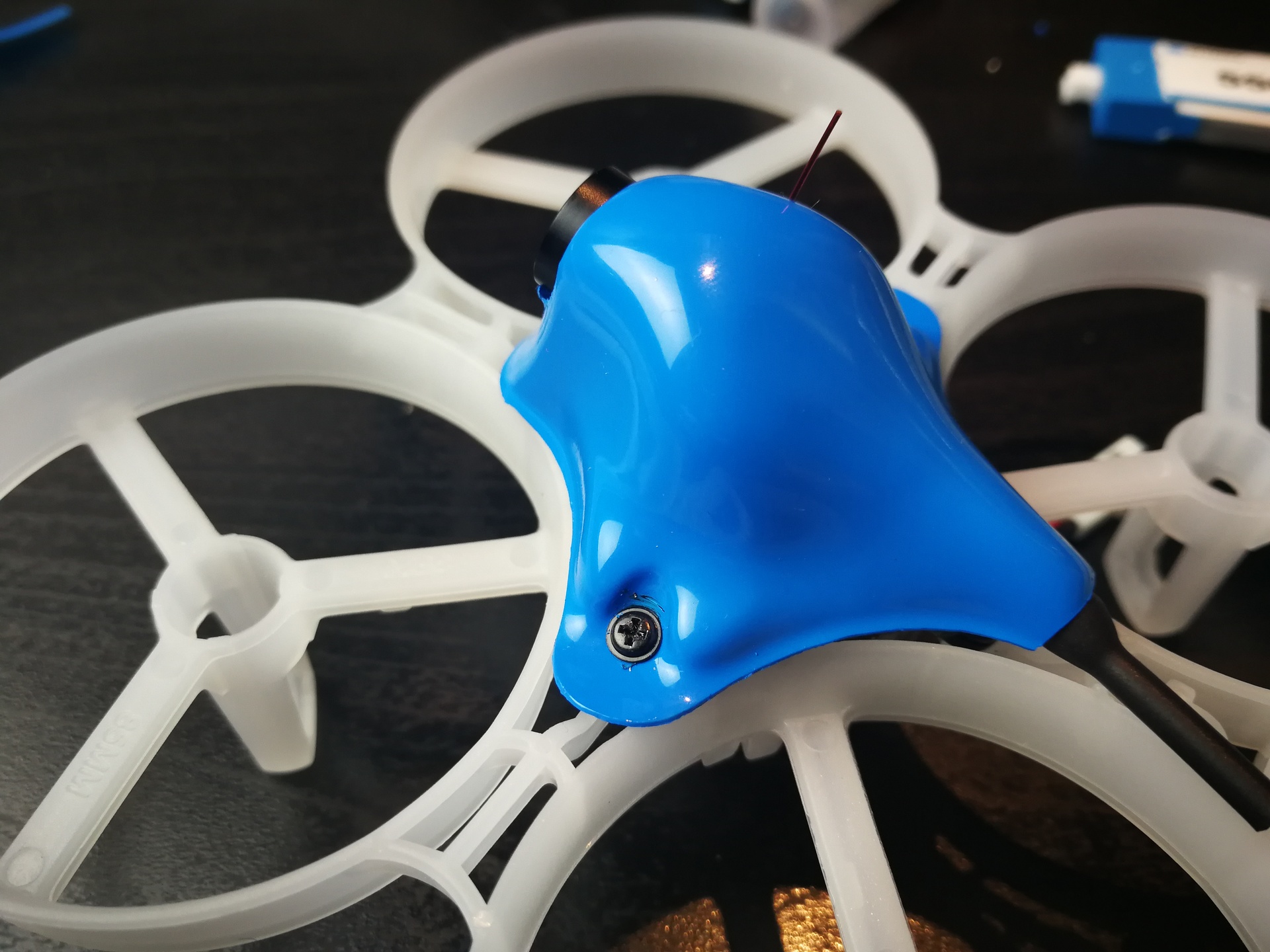
- Rama, śmigła, kadłub: Wszystkie pozostałe komponenty pochodzą również od BetaFPV. Tutaj wygrywają względy estetyczne, bo niebieski kolor w kopterze niezwykle mi pasuje i jeśli mam taką opcję, to chętnie go wybiorę. Elementy te nie różnią się specjalnie od innych dostępnych na rynku i śmigła o średnicy 48mm wyglądają dokładnie tak samo, jak te od Tiny 8 dostępne np. na Banggood. Kadłub jest dopasowany do kamery i jej kąta pochylenia, więc tutaj wybór jest już mocniej narzucony. Rama z kolei jest już dość standardowa i nie wiem, czy odbiega czymkolwiek od pozostałych w tym rozmiarze. Zaletą jest to, że BetaFPV dostarcza tą część dobrze zapakowaną, a więc i prostą, co niestety nie jest regułą, jeśli chodzi o tańsze odpowiedniki, którym zdarzają się wygięcia i brak symetrii.

Składamy!
Przyjrzyjmy się wpierw, co i gdzie podłączyć, aby całość zaczęła działać. Zaczynając od kamery - musimy jej dostarczyć zasilanie. Z uwagi na to, że akceptuje ona od 2.9V-5.5V, możemy ją podłączyć bezpośrednio pod pady na kontrolerze lotu, do których dochodzą przewody zasilające, czyli "+" i "-".
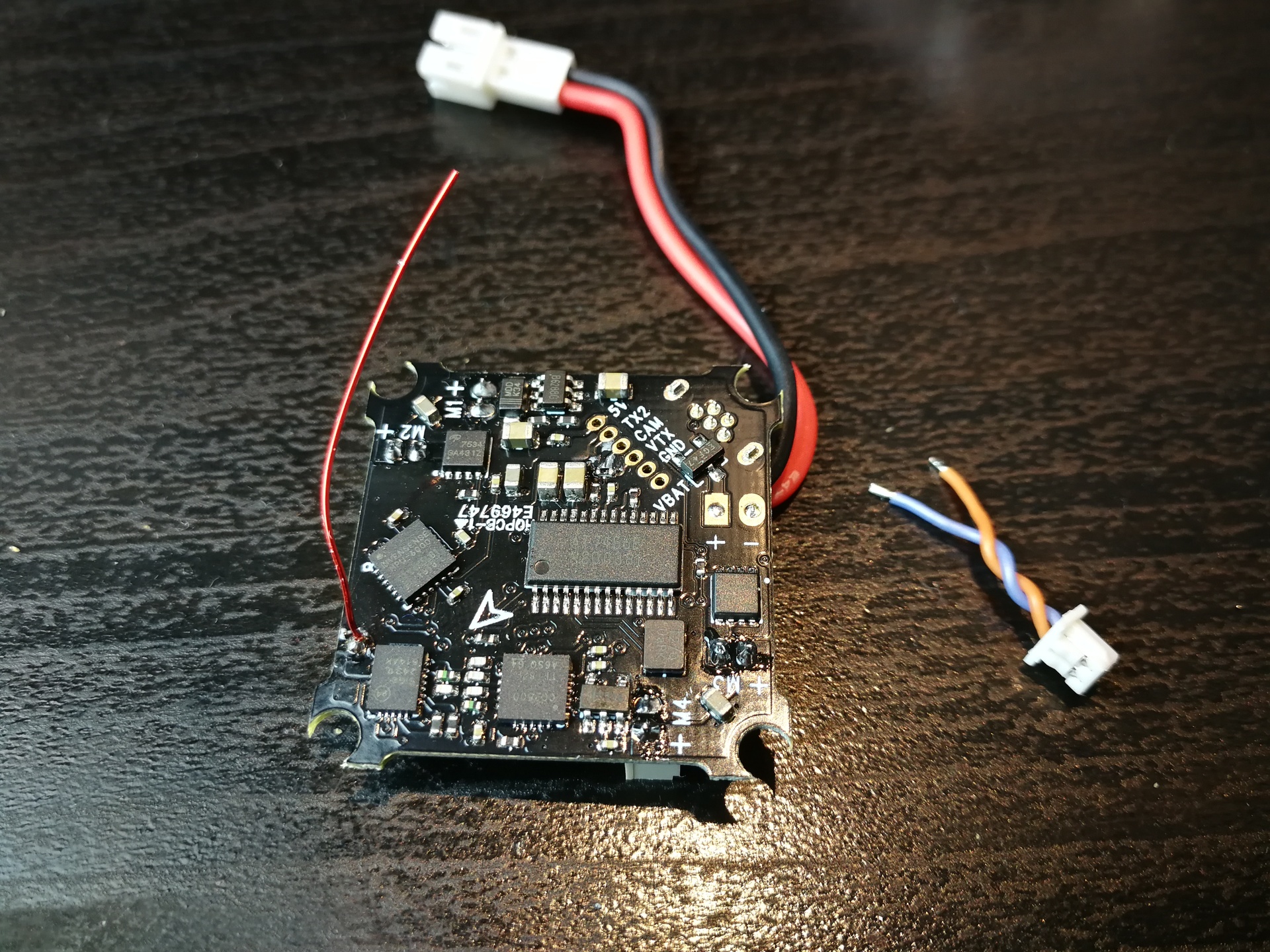
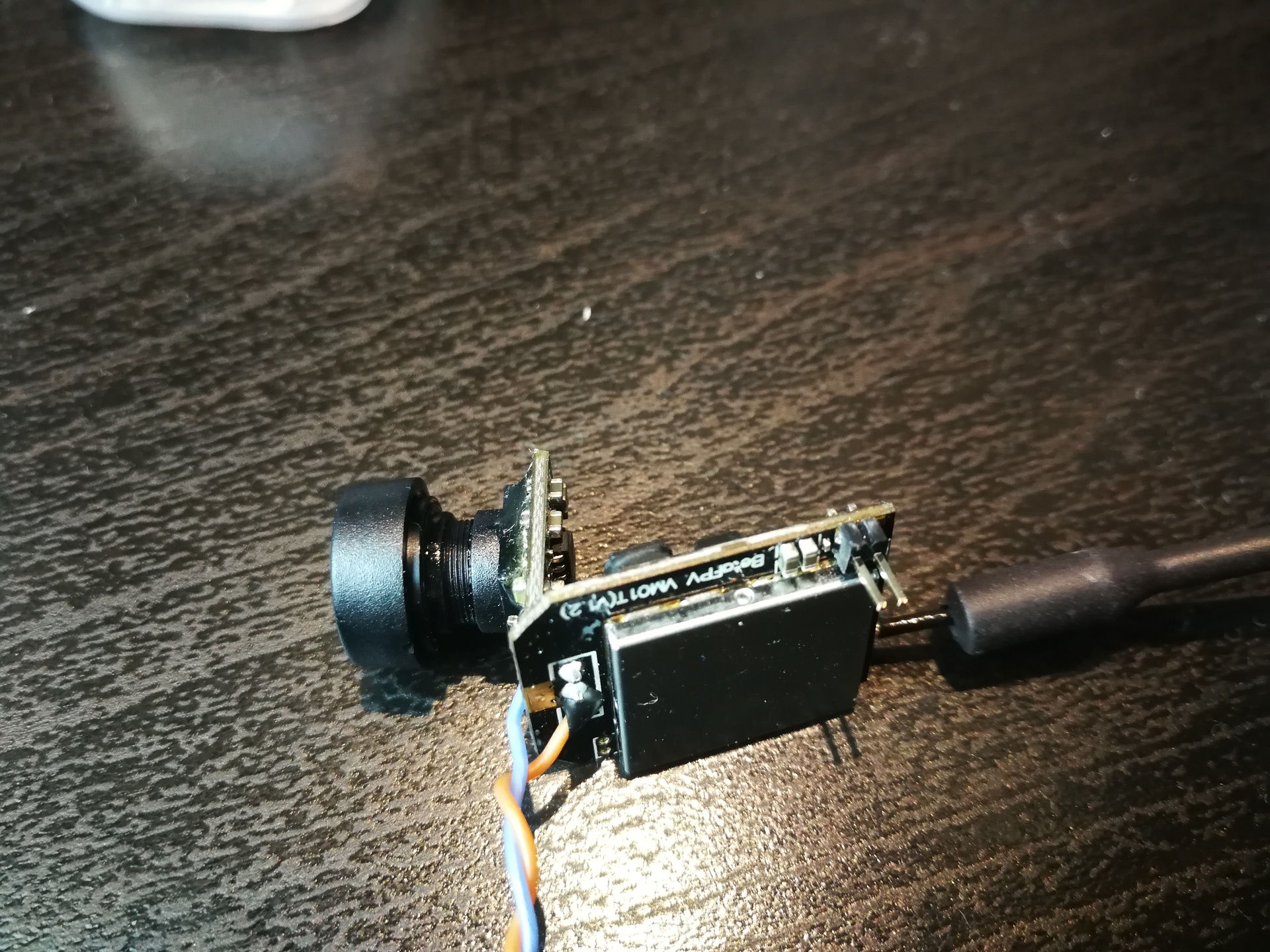
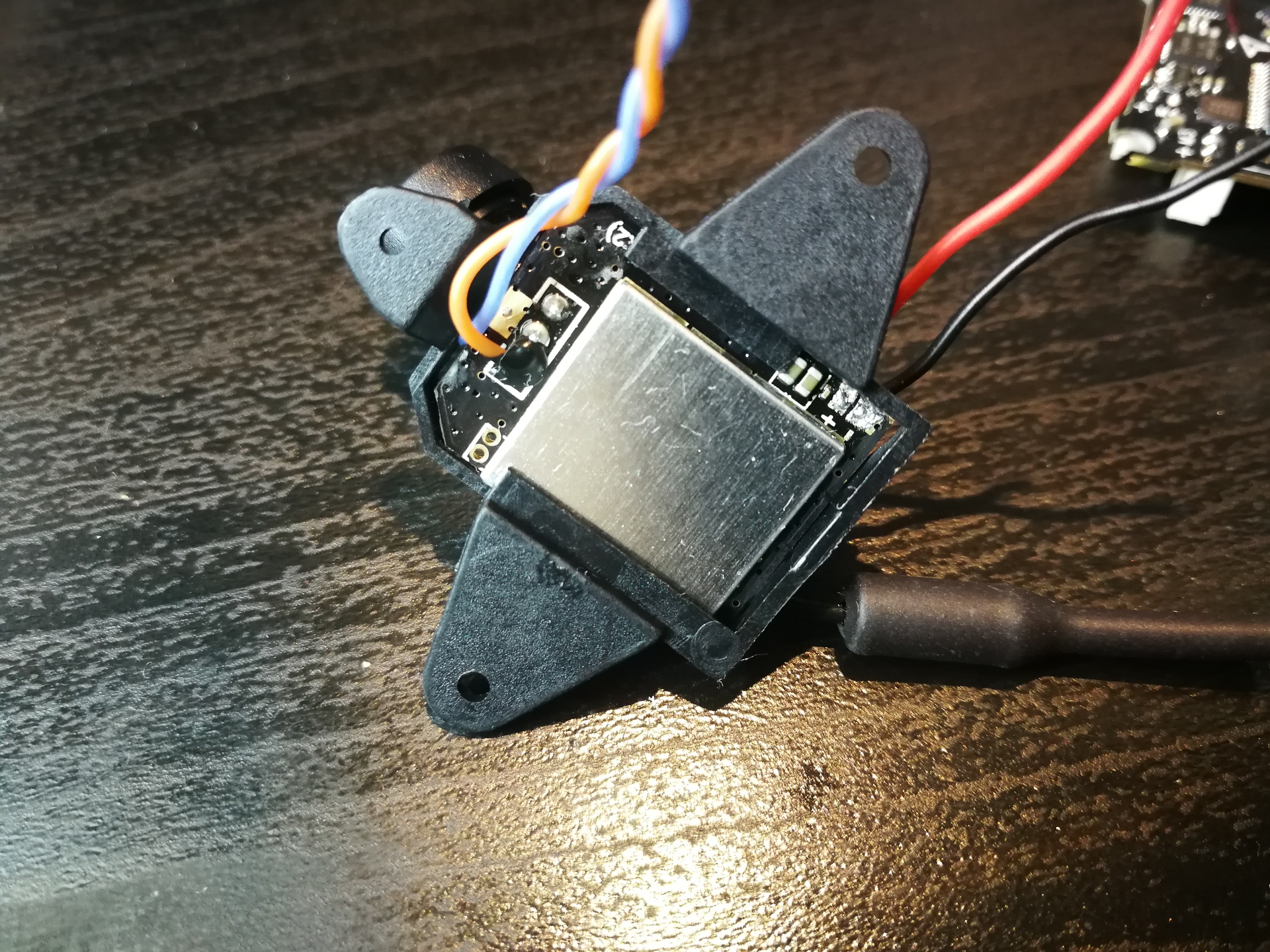
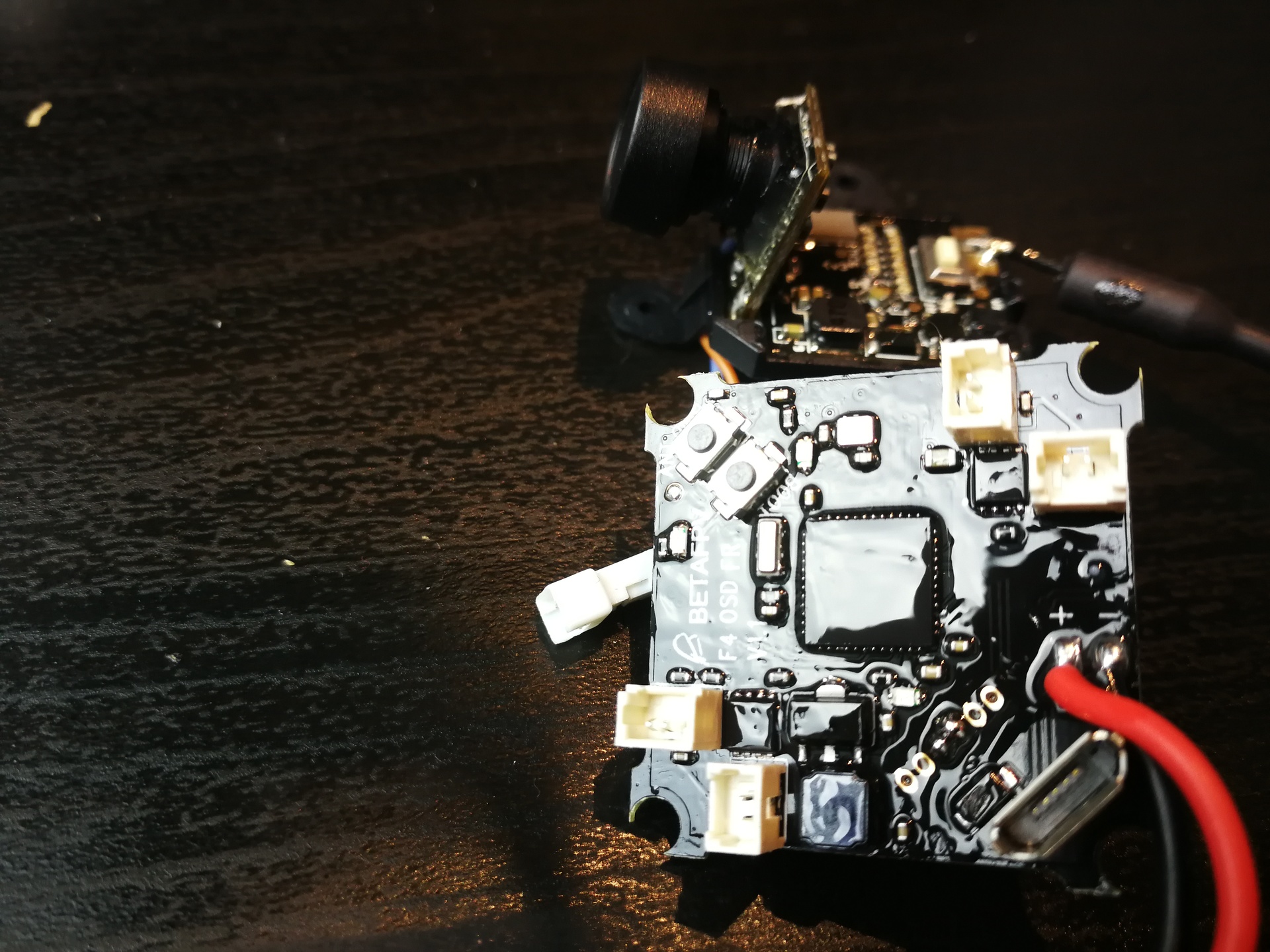
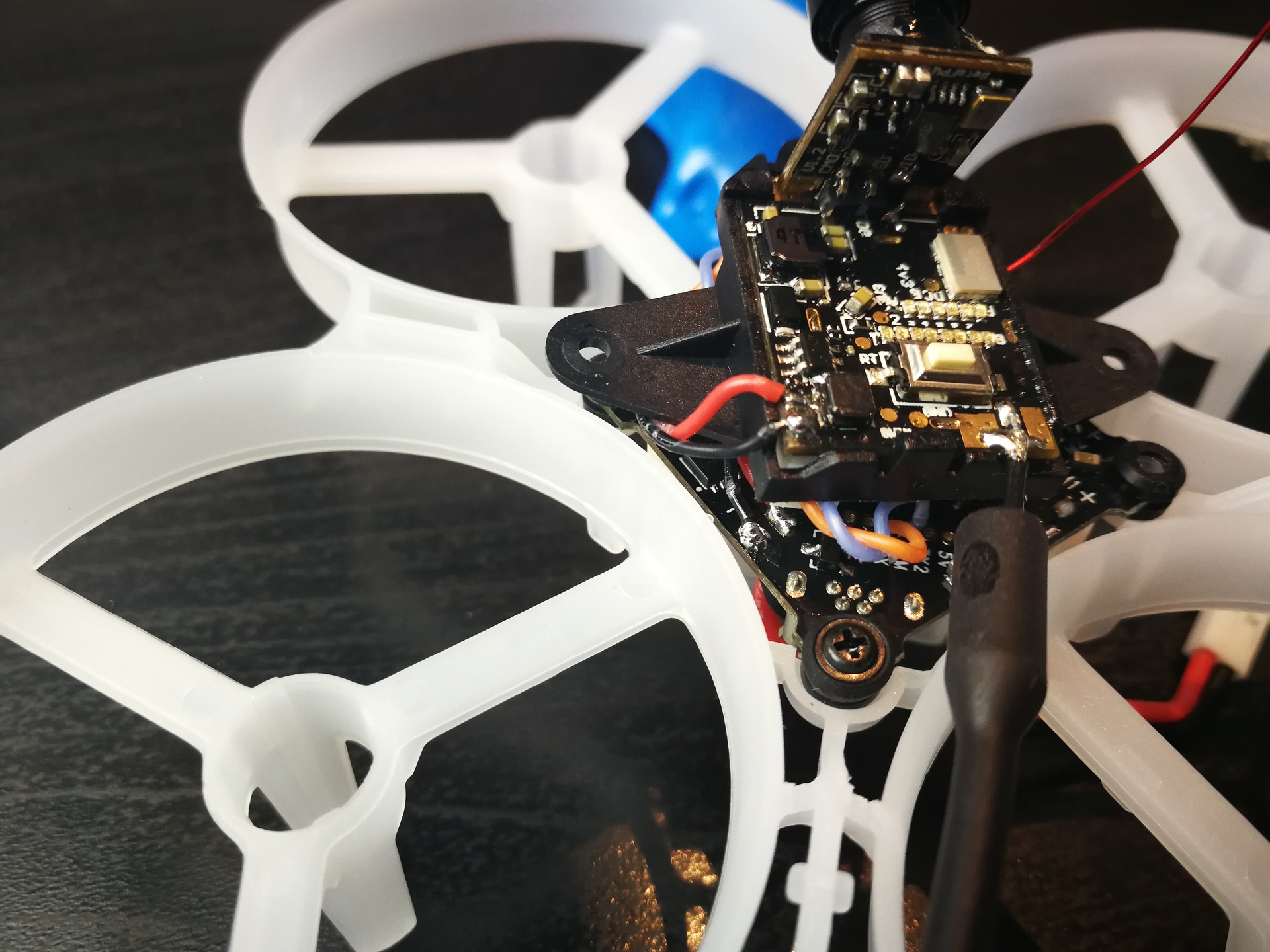
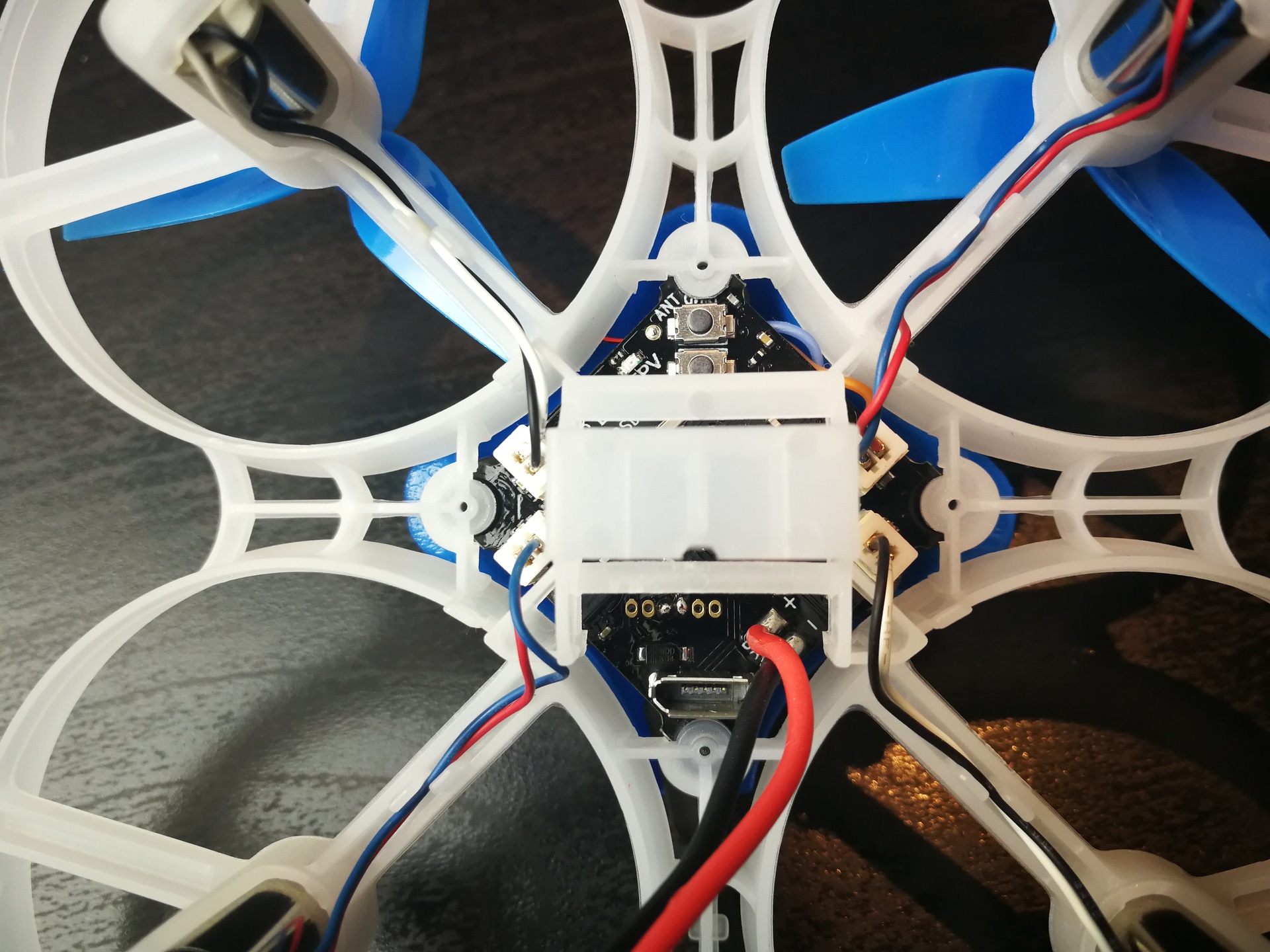
Kamera Z01 występuje w 2 wariantach - z przewodami dla OSD, oraz takiej, w której wyjście wideo jest zlutowane z wejściem po stronie nadajnika. Ja świadomie wybrałem ten pierwszy, ponieważ kontroler lotu posiada własne OSD. Na zdjęciu powyżej możemy zobaczyć dwa punkty lutownicze oznaczone jako "CAM" i "VTX". Jest to odpowiednio wejście sygnału z kamery i wyjście do nadajnika. Będziemy musieli dolutować tam wtyczkę, którą następnie podepniemy do kamery. Zwracam szczególną uwagę, że na zdjęciu poniżej kamera ma dwukolorowy przewód zakończony wtyczką. Nie jest to zasilanie! Są to właśnie złącza sygnału wideo od kamery i nadajnika, a podłączenie ich do zasilania spali układ!
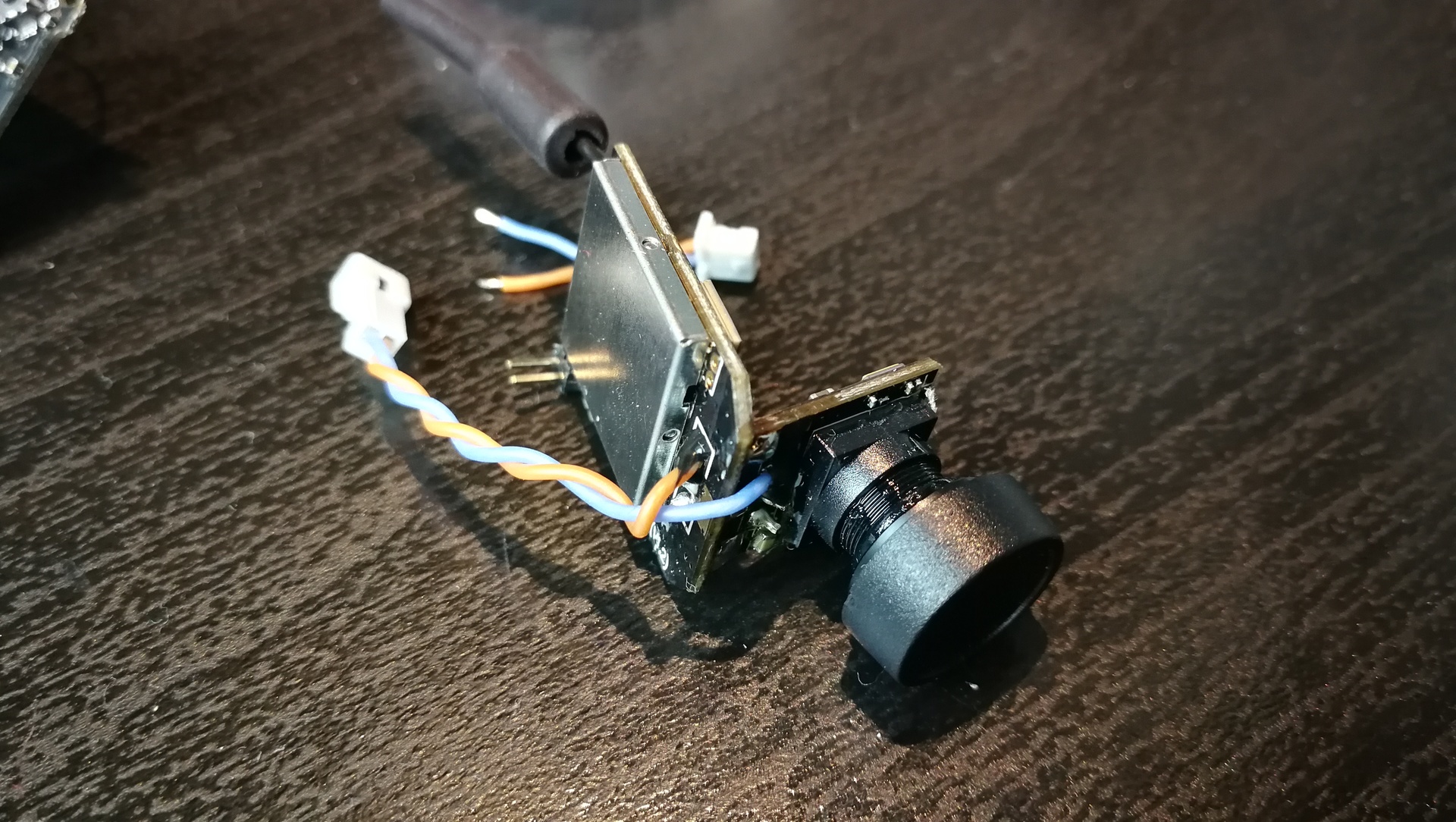
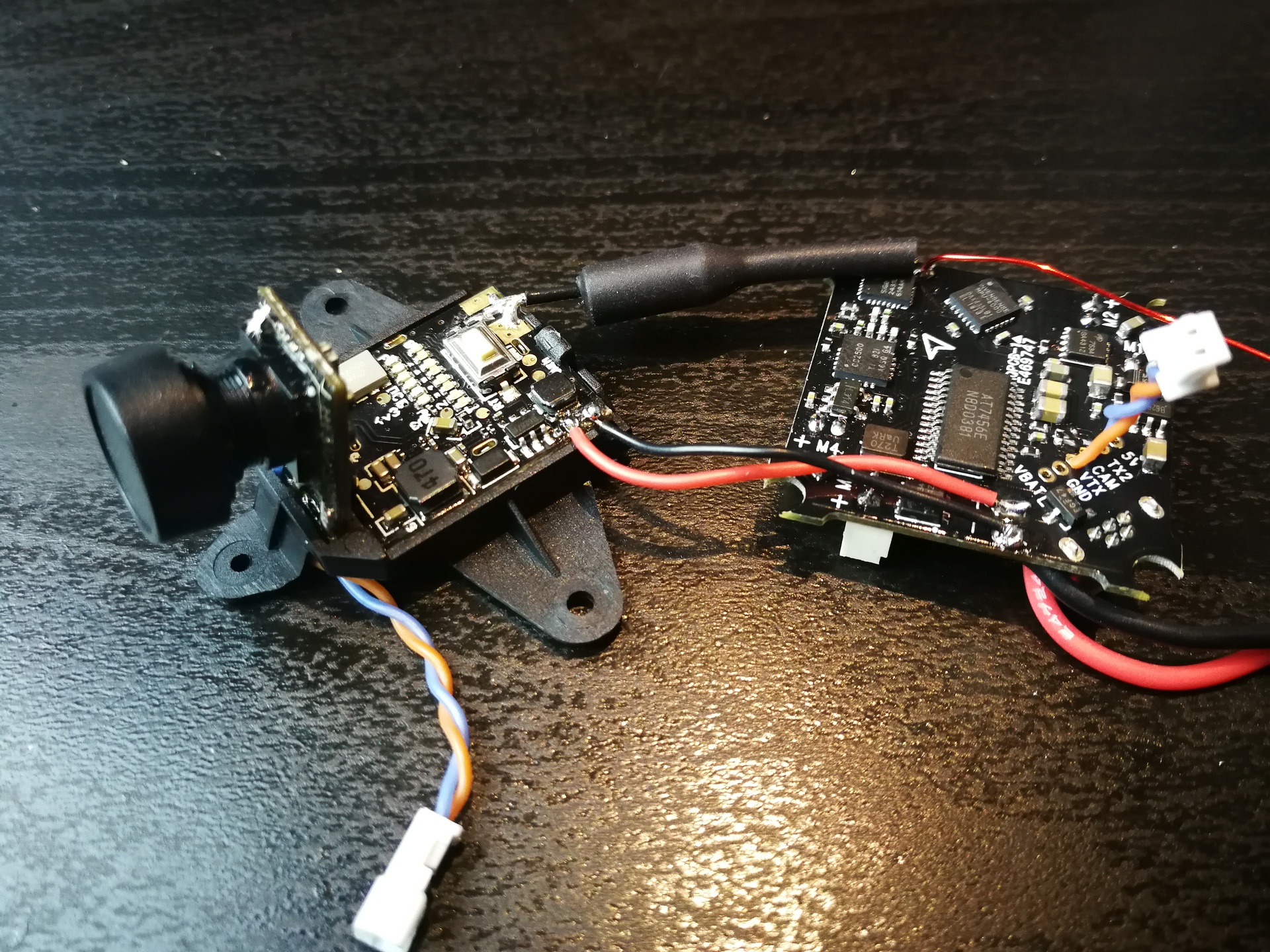
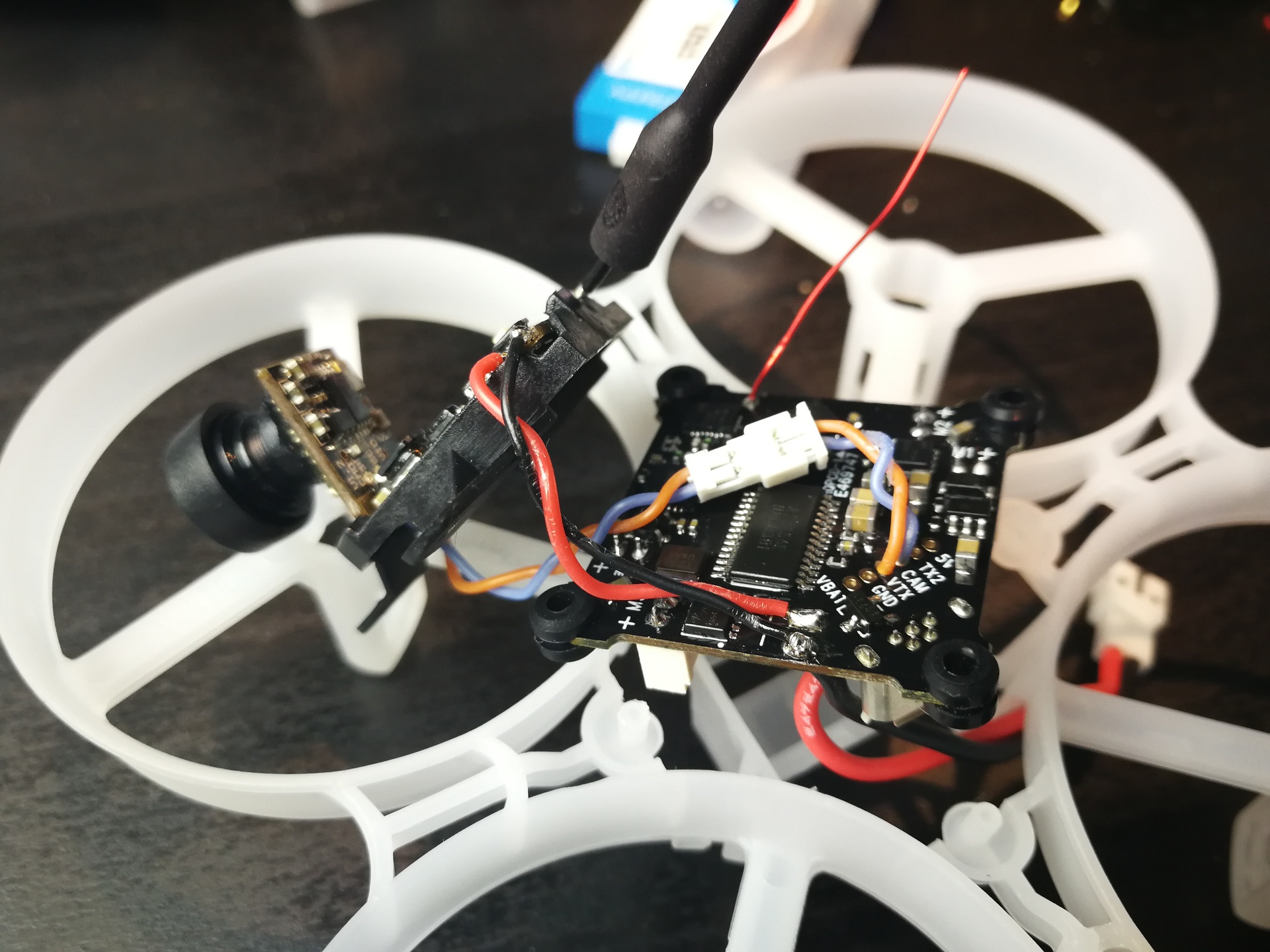
Zacznijmy od przylutowania przewodu od OSD. Kiedy spojrzymy na obrazek powyżej, to zobaczymy, że niebieski przewód wychodzi z kamery, zaś czerwony połączony jest z nadajnikiem FPV. Oznacza to, że sygnał wideo wychodzi tym pierwszym, zaś wraca do nadajnika drugim. Spójrzmy teraz na kontroler lotu. Zgodnie z tym, co spostrzegliśmy wcześniej, niebieski przewód (wyjście wideo z kamery) musimy podłączyć do punktu oznaczonego CAM. Tamtędy sygnał będzie wchodził do OSD. Układ naniesie informacje na obraz (np. napięcie baterii, czy nazwę koptera), a następnie poda sygnał na wyjściu VTX. Z uwagi na to, że czerwony przewód łączył się z nadajnikiem, tam właśnie musimy go przylutować. Po zdjęciu fragmentu izolacji nie będziemy mieli problemu, by przeciągnąć obie żyły przez wskazane otwory w kontrolerze lotu - wszystko widać na zdjęciu poniżej.
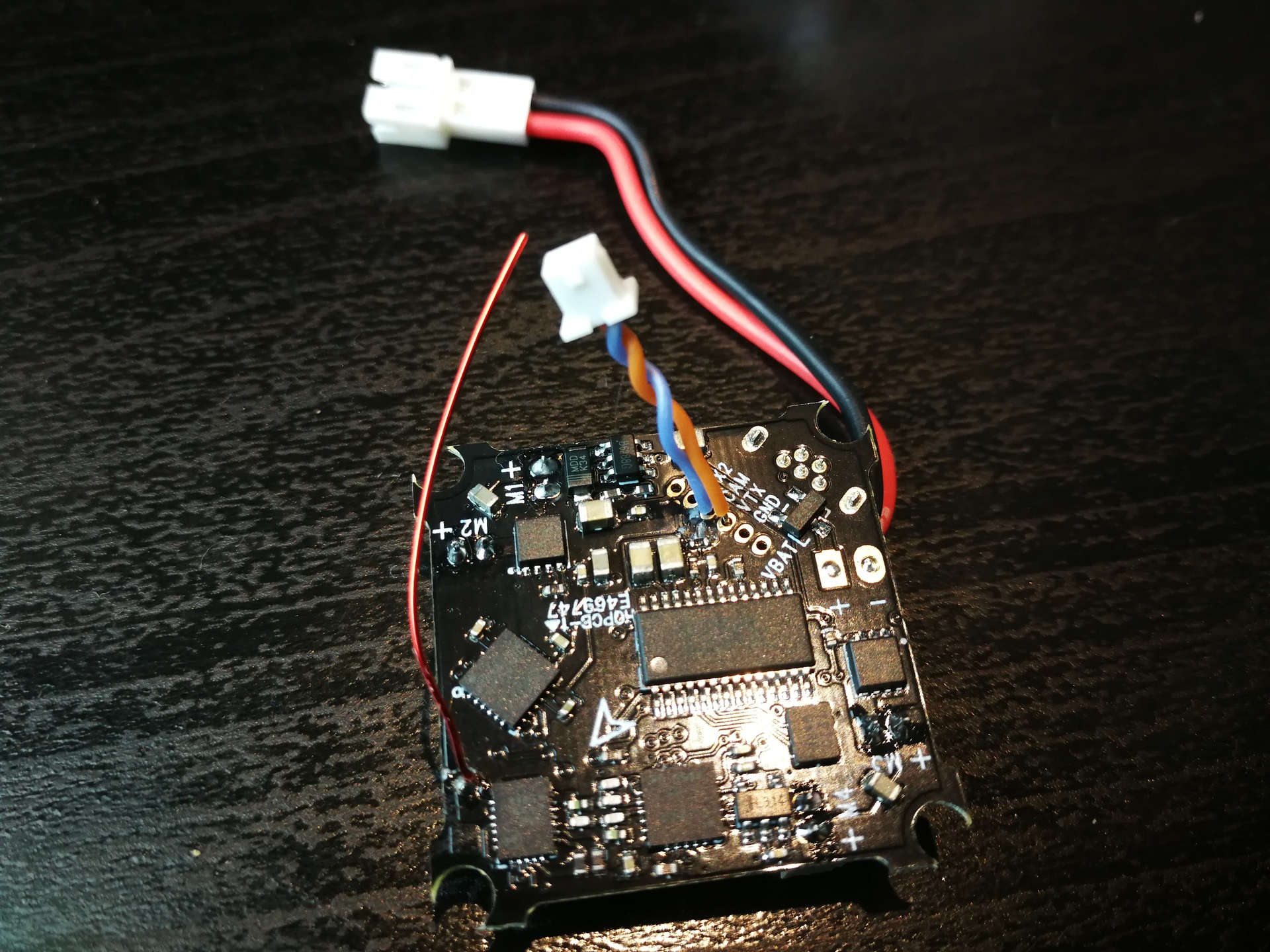
Teraz pora rozgrzać lutownicę i przylutować wspomniane przewody. Moja metoda to przeciągnięcie końcówki przewodu przez otwór (bez izolacji) i zagięcie go w taki sposób, żeby się nie wysunął, ale jednocześnie nie zwarł z sąsiednim polem lutowniczym. Najlepiej wyginać przewód w tą stronę, z której nie ma elektroniki. Następnie przykładam końcówkę lutownicy wraz z cyną i formując okrągłą kroplę na polu lutowniczym, mam pewność, że przewód nagle nie puści. Końcowy efekt wygląda tak, jak poniżej. Pady są w lewym-dolnym rogu.
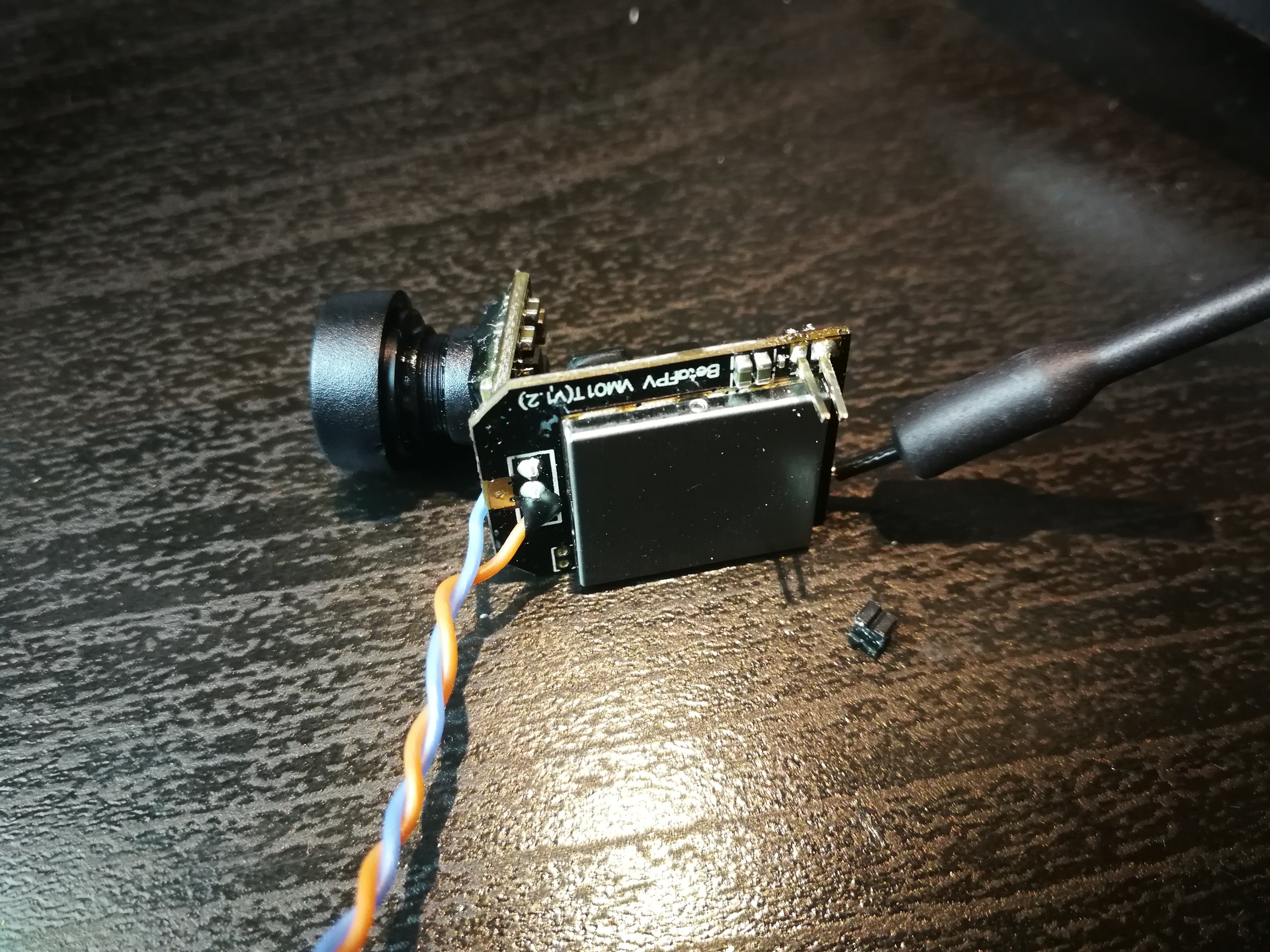
Następny krok zrodził dość spory problem. Nadajnik Z01 ma wyprowadzone dwa piny, które powinny być włożone w gniazdo na kontrolerze lotu. Rzecz w tym, że wybrany przeze mnie FC z procesorem F4, zamiast starszego z F3, nie ma takiego wyprowadzenia. Gdybym kupił komplet, to nadajnik po prostu nałożyłbym na wierzch kontrolera lotu i voila - wszystko byłoby gotowe. Tutaj jest inaczej. Piny z nadajnika trzeba wylutować, zaś w ich miejsce dać przewody zasilające.
Aby było łatwiej, ściągąłem plastikowy separator, który tworzy dystans między dwoma pinami. Można go zdjąć zwykłymi, nie za dużymi obcęgami.
Piny można wylutowywać teraz pojedynczo i w moim przypadku trwało to dobre 15 minut. Rzecz w tym, że zastosowana cyna wymagała wysokiej temperatury, żeby się rozpuścić. Ja pracowałem pod koniec gdzieś na 380-400 stopniach. Przy tych temperaturach łatwo jest przegrać układy, więc należy pilnować, aby grota lutownicy nie przykładać na zbyt długi czas. Z jednej strony grzałem miejsce lutowania, z drugiej ciągnąłem obcęgami przylutowany pin. W końcu, kawałek po kawałku, udało mi się wyciągnąć oba i zebrać nadmiar cyny, który zwarł mi oba pola lutownicze (w przypadku zasilania to niedobry pomysł). Nadajnik był gotowy, aby przylutować przewody zasilające.
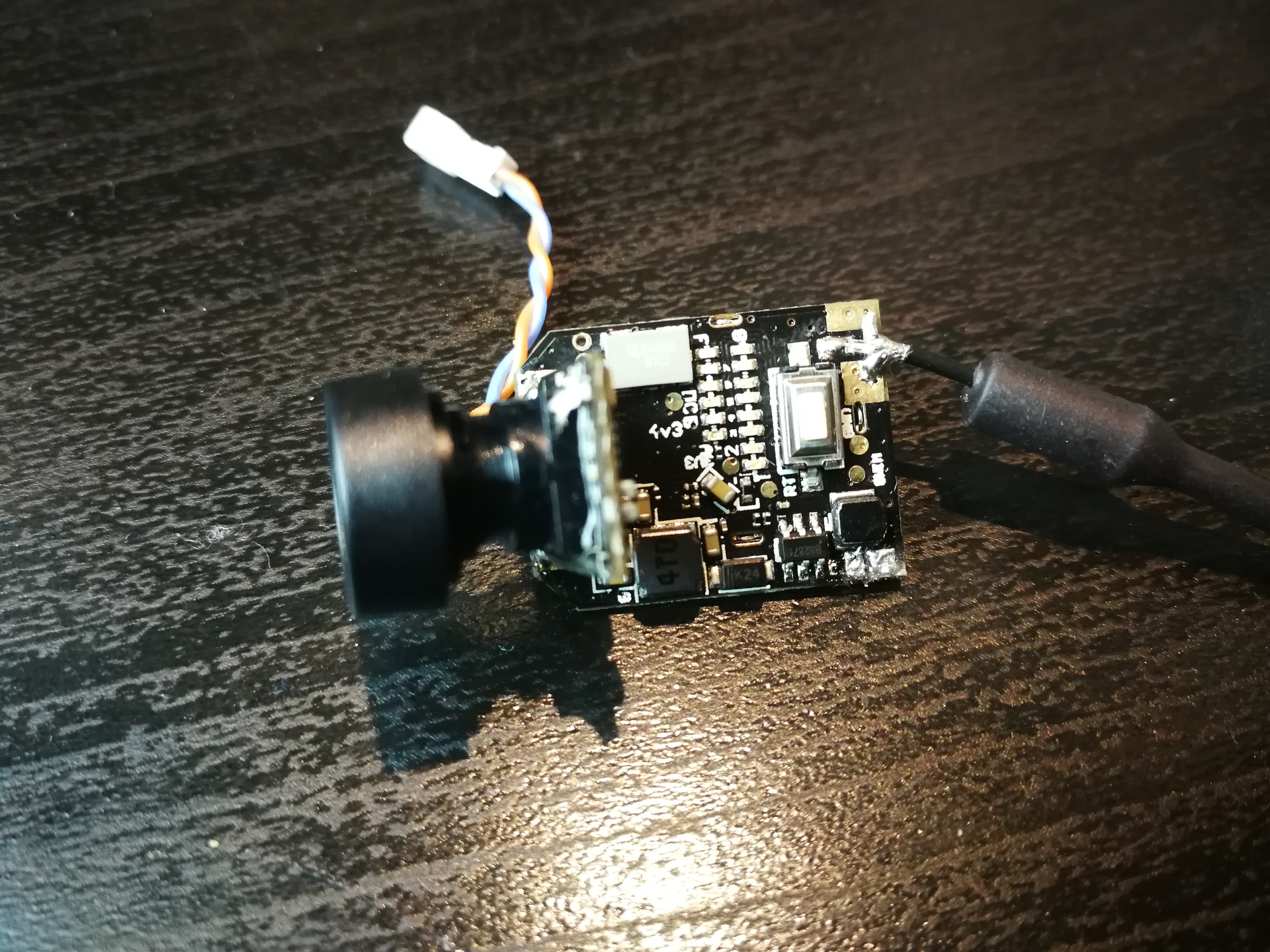

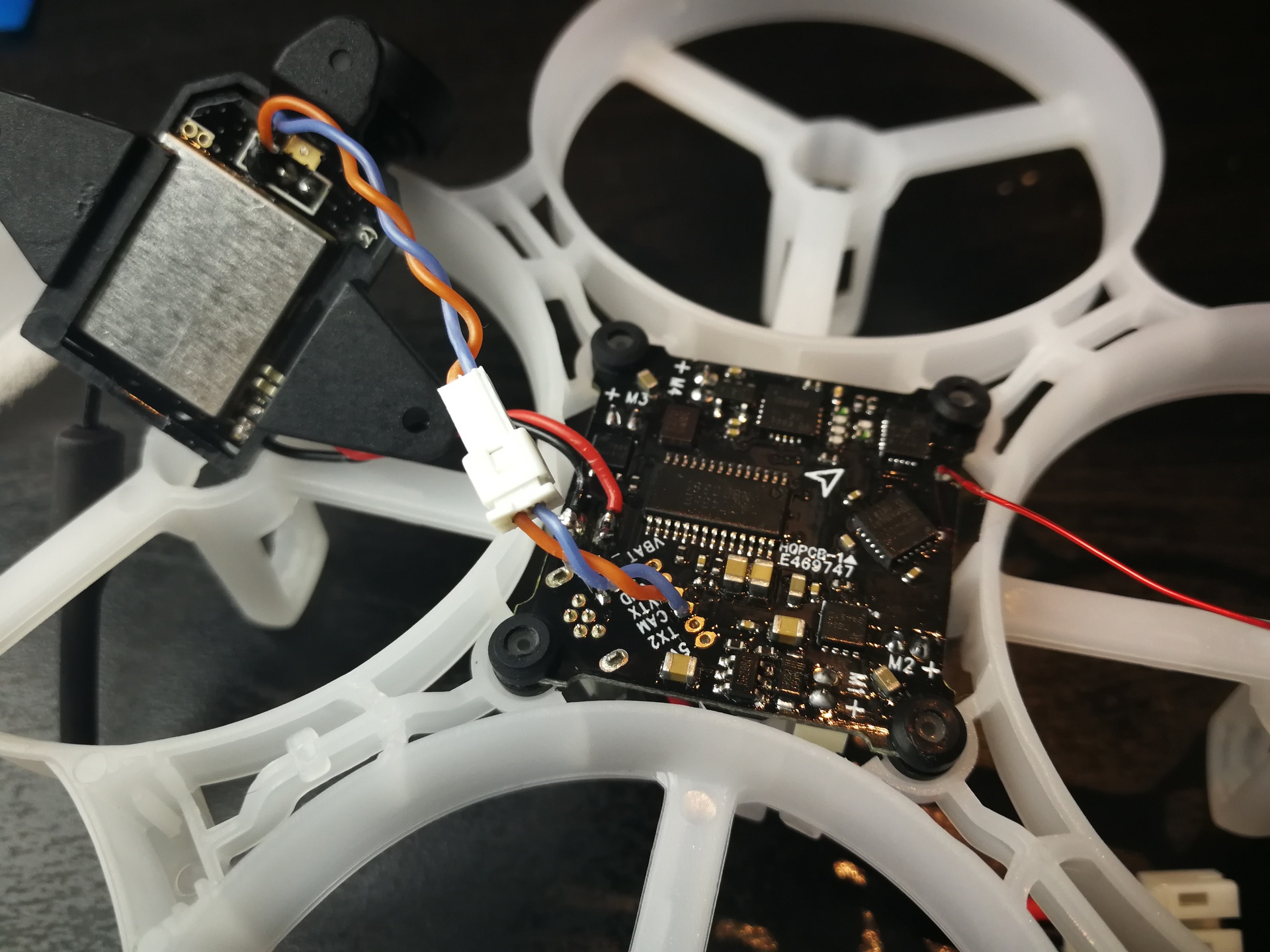
Następnym krokiem było znalezienie najcieńszych przewodów w silikonowym oplocie (nie topi się tak szybko jak PCV, a całość jest elastyczna i łatwiej daje się wyginać i układać, jak chcemy). Przewody przylutowałem z wierzchu, ponieważ prześwit pomiędzy nadajnikiem, a kontrolerem lotu będzie niewielki i nie chciałem dodatkowo zmniejszać go przylutowanymi przewodami. W zamian zostawiłem nieco dłuższe kabelki, aby przy montażu zdecydować, jakiej finalnie długości potrzebuję. Należy pamiętać, że w tak małym kopterze każdy centymetr przewodu gdzieś trzeba "upchać", a i dokłada on wagi, więc należy pozbywać się niepotrzebnych nadmiarów.
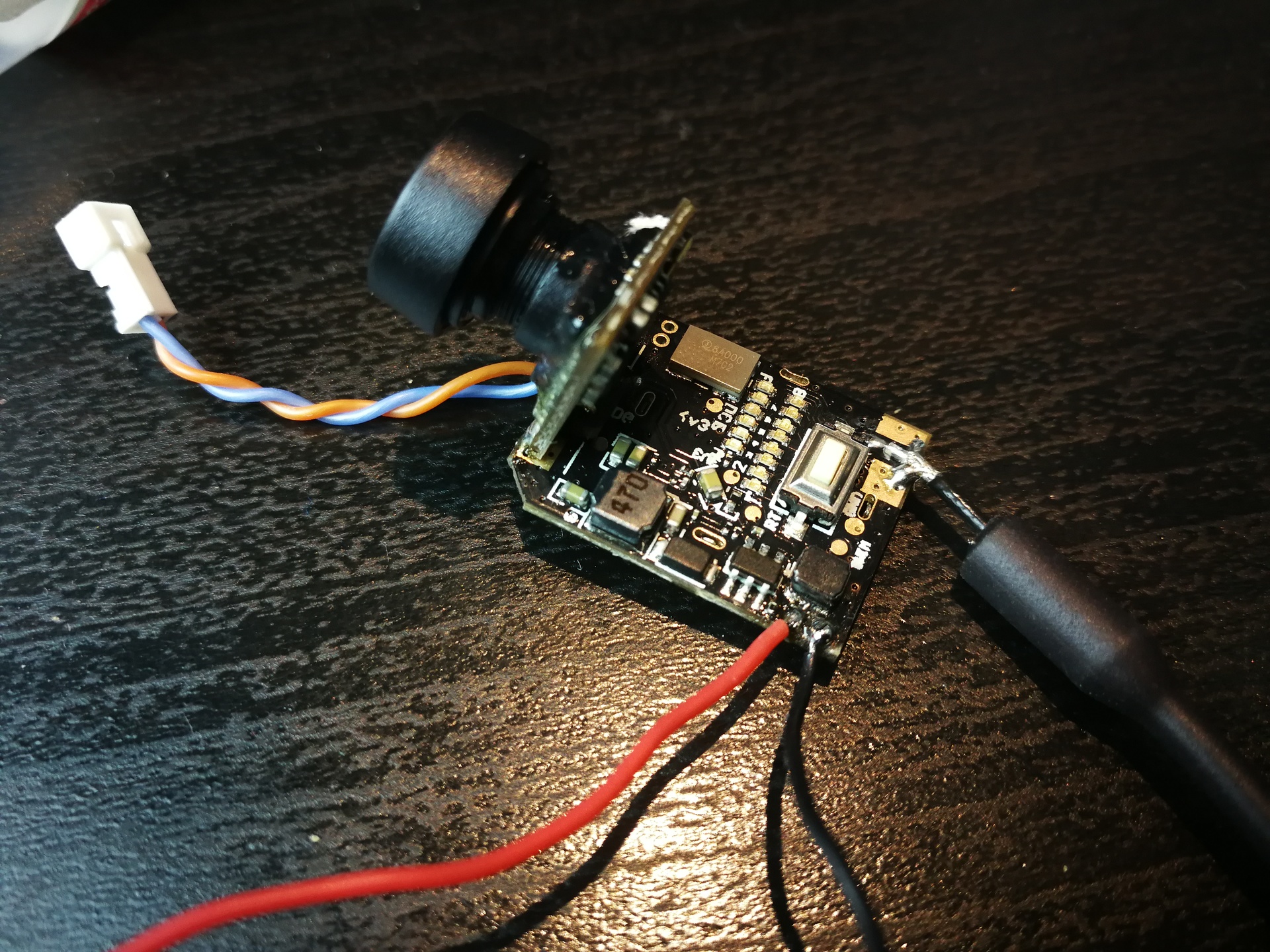
Ja przylutowałem przewody od góry, ale można to zrobić także od spodu. W tym jednak wypadku należy tak je ułożyć, aby po przylutowaniu skierowane były do środka, ponieważ ramka, w którą wkładamy kamerę blokuje w zasadzie cały bok płytki. Przewody nie mogą więc wychodzić w kierunku krawędzi nadajnika. Jak widać, kabelki od OSD zamocowano właśnie od spodu, ale z uwagi na niewielki prześwit pomiędzy kontrolerem, a nadajnikiem, gdybym poprowadził drugą parę przewodów, zaczęłoby się robić ciasno. Wybór należy jednak do Was.
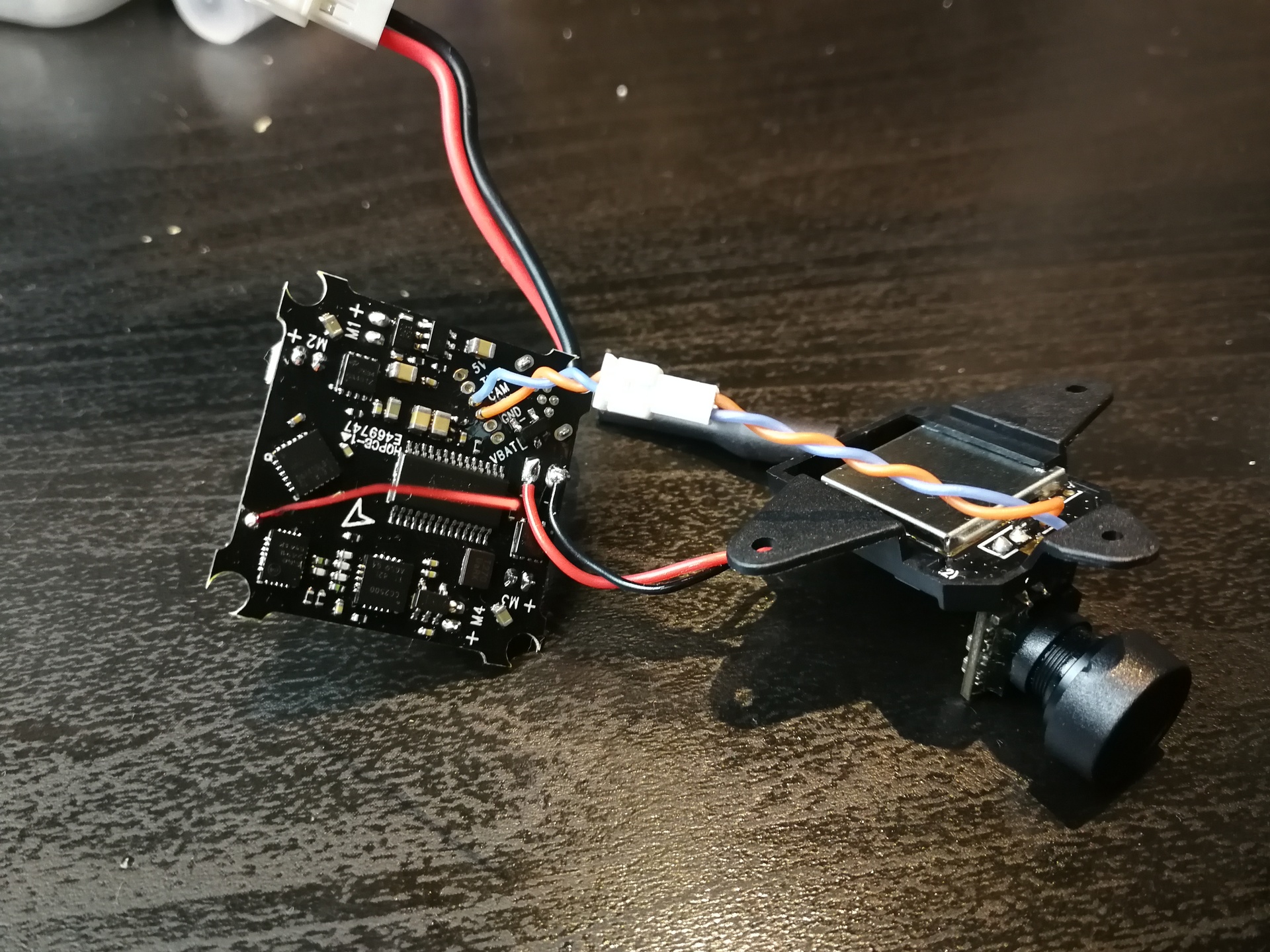
Kabelek, którym podłączamy Li-Po do kontrolera lotu został przylutowany fabrycznie od spodu płytki. Pady lutownicze znajdują się jednak też z wierzchu, więc swobodnie możemy wykorzystać je, aby doprowadzić zasilanie do nadajnika i kamery. Po włożeniu elementu w mocowanie, które było w zestawie i sprawdzeniu potrzebnej długości, przylutowałem oba przewody łącząc na stałe obie płytki.
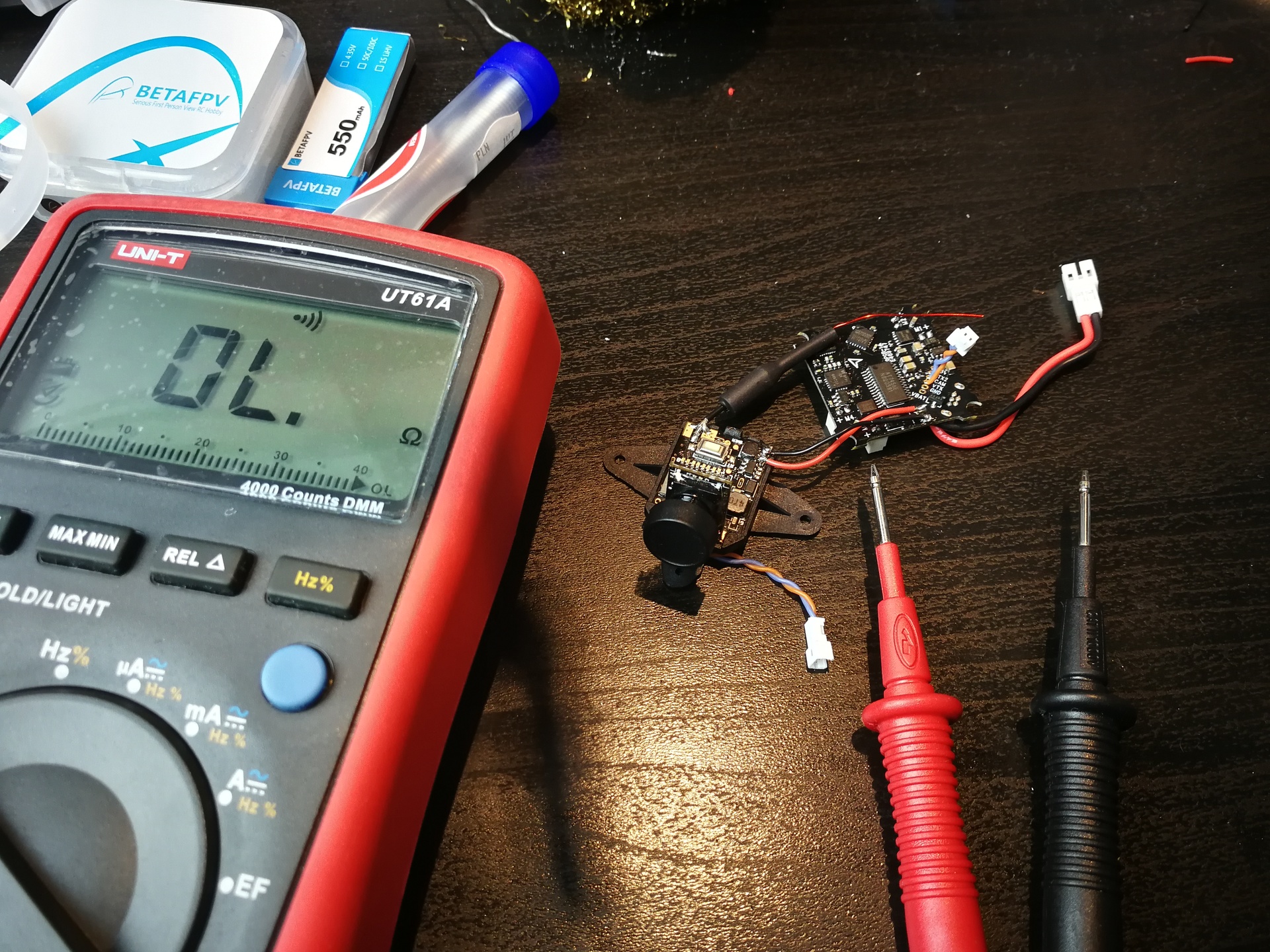
Nim rzucimy się do montażu elektroniki w ramie koptera, warto wpierw sprawdzić, czy podczas lutowania nie zrobiliśmy żadnego zwarcia. W tym celu należy przestawić multimetr w tryb pomiaru ciągłości obwodu (symbol diody) i przytykać sondy do punktów, w których dołączaliśmy zasilanie. Najpierw jest to kamera i miejsce lutowania przewodów: czerwonego i czarnego. Sondy najłatwiej jest przytykać zgodnie z ich własnym kolorem, czyli czerwoną do czerwonego przewodu i analogicznie czarną, ale możemy zrobić na odwrót i też będzie dobrze. Chodzi tylko o to, że jeśli jest zwarcie to po dotknięciu sondami dwóch punktów, które nie powinny być połączone (przykładowo punkty lutownicze "+" i "-" na kontrolerze lotu), to miernik zacznie piszczeć. To z kolei będzie oznaczać, że pomiędzy sondami popłynął prąd, a nie miał prawa, bo oba punkty nie powinny być ze sobą połączone. Oprócz sprawdzenia lutowania padów w kamerze, powinniśmy też to samo zrobić na kontrolerze lotu, a następnie sprawdzić, czy przewody od OSD, czyli CAM i VTX nie są ze sobą zwarte.

Tą samą metodą możemy też sprawdzać, czy przewody faktycznie łączą dwa punkty ze sobą. Można na przykład przytknąć jedną sondę do miejsca, gdzie przylutowaliśmy czerwony przewód do nadajnika FPV. Drugą sondą dotykamy do drugiego końca przewodu - punktu lutowniczego na kontrolerze lotu oznaczonego "+", z którego wychodzi tenże czerwony przewód. Tamtędy prąd płynąć powinien, więc miernik zapiszczy sygnalizując, że mamy połączenie.
Możemy wreszcie sprawdzić, czy sygnał wideo będzie docierał z kamery do kontrolera lotu i z powrotem do nadajnika. W tym celu łączymy ze sobą obie wtyczki od OSD, a następnie przytykamy jedną sondę do miejsca przylutowania niebieskiego przewodu na kamerze, a drugą do punktu, w którym niebieski przewód przylutowaliśmy do kontrolera lotu. Jeśli gniazdo łączy i lutowanie jest poprawne, to miernik również zapiszczy. W ten sam sposób możemy dotknąć obu końców przewodu czerwonego od OSD i tam również miernik powinien się odezwać.
Z uwagi na to, że w zasadzie wszystkie modele zabezpieczam PVB60, nie robiłem wyjątku dla Bety85, mimo iż nie przewiduję, żeby latała zbyt wiele na zewnątrz. Uważam jednak, że dodatkowo chroni to wszystkie punkty, które lutowałem, więc poświęcam chwilę, aby całość pokryć lakierem. W przypadku niewielkiego kontrolera i nadajnika FPV należy szczególnie uważać, aby przy okazji nie dostał się on do wnętrza gniazd i pod przyciski, które wtedy przestaną pracować. Wystarczy w tym celu po prostu nakładać bardzo cienką warstwę nie pozwalając, aby lakier się rozpływał i operować umiejętnie pędzelkiem, aby omijać niektóre punkty. Grunt to robić to spokojnie i powoli. PVB60 położyłem także na tylnej części kamery. Aby lakier nie dostał się w okolice matrycy, wierzchnią część odpuściłem.
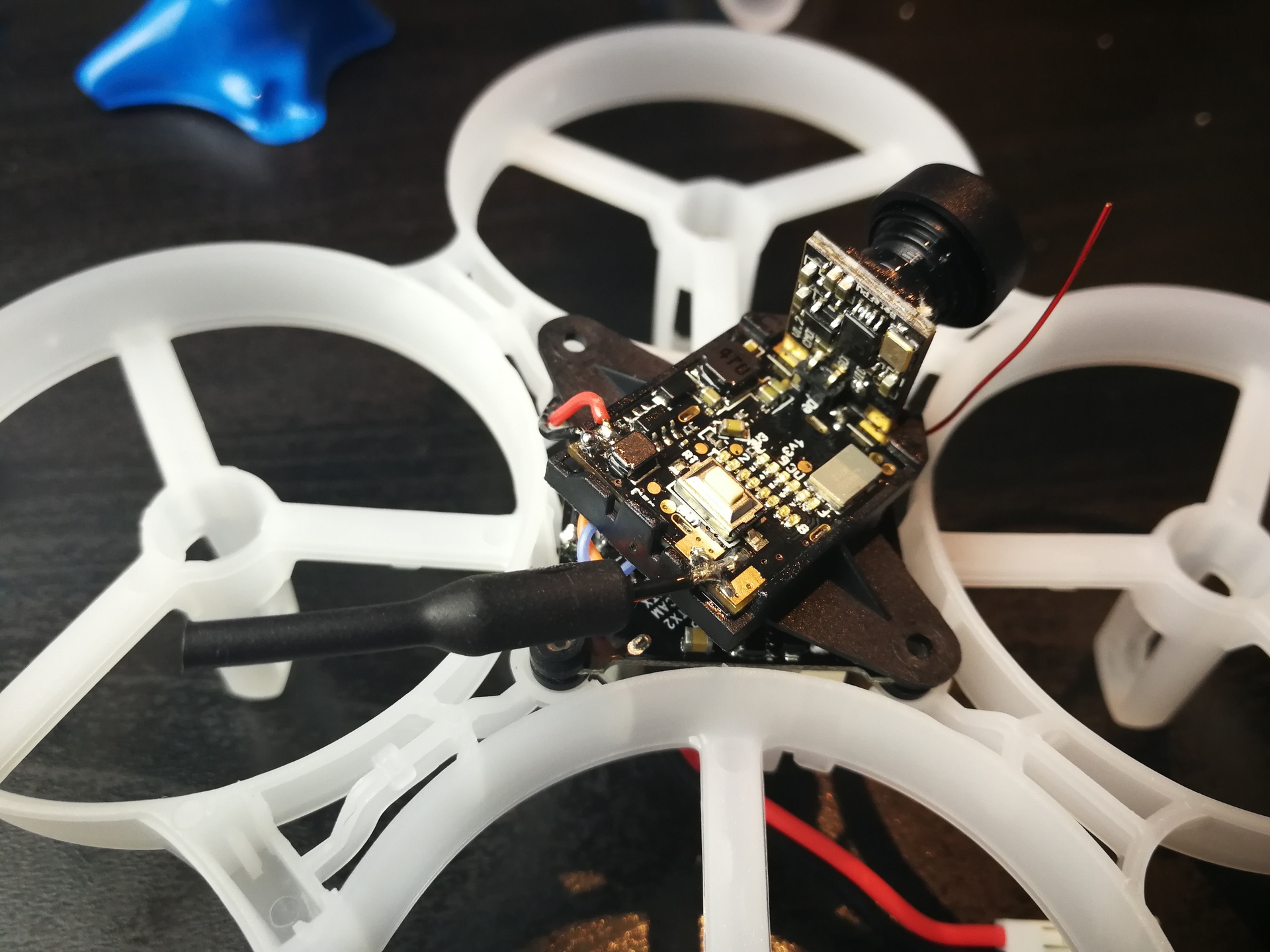
W tym momencie skończyliśmy już lutowanie i sprawdzanie elektroniki i możemy się zabrać za montaż. Kontroler lotu osadza się na ramie na 4 gumkach, które również były w zestawie. Każdą z nich wciska się w narożniki płytki, a ją samą nakłada na wypustki na środku ramy. Należy pamiętać, że płytka jest obrócona o 45 stopni i przód kontrolera znajduje się wyjątkowo na skosie.

Kontroler lotu powinien dość stabilnie ułożyć się na słupkach montażowych w ramie, ponieważ rozmiary są ustandaryzowane. Następnym krokiem powinno być położenie na nim ramki z kamerą. Należy przy tym zwracać uwagę na rozmieszczenie przewodów, aby nie były one naprężone, ale też nie wisiały zupełnie luźno, szczególnie poza obrysem kontrolera lotu. To, co się da, najlepiej "upchnąć" pomiędzy nadajnik, a kontroler lotu.
Kontroler lotu przykręcamy w sumie 4 śrubkami do ramy. Należy przy tym zwrócić uwagę, że każdą z nich będziemy montowali w innym momencie. Tylna trzyma jedynie główną płytkę i jako taką możemy wkręcić ją od razu.
W następnym kroku musimy ułożyć nadajnik na kontrolerze lotu. Przewody, jak już wspominałem, umieśćmy w ramach możliwości pomiędzy płytkami, aby nie przeszkadzały nam przy montażu kadłuba.
Pora na wkręcenie przedniej śrubki montażowej. Będzie ona trzymała dodatkowo ramkę z kamerą i nadajnikiem, więc musimy je wpierw nałożyć na wierzch i dopiero przykręcić. Boczne na razie zostawiamy, ponieważ będą one trzymały także kadłub.
Przy okazji, ustawmy antenkę od odbiornika FrSky na sztorc. Po skończeniu składania możemy albo puścić ją wzdłuż kadłuba, albo zrobić w nim miniaturowy otwór i ją wyprowadzić. Ja zostawiłem ją na zewnątrz.
Nim założymy kadłub, warto sprawdzić, czy elektronika wciąż działa. Jeśli sprawdziliśmy połączenia miernikiem to raczej nic się nie popali, ale gdyby coś nie działało, to teraz jest ostatni moment, gdy mamy jeszcze swobodny dostęp do układów. Warto na tym etapie ustawić również kanał w nadajniku FPV, ponieważ potem będzie się trudniej do niego dostać, jeśli nie chcemy wycinać otworu w kadłubie. Fabrycznie jest on jednolity i nie ma w nim dostępu do przełącznika - niestety.
Pora wreszcie na założenie kadłuba. Otwory nie są w nim idealnie dopasowane do tych w ramie i kontrolerze lotu, więc może się okazać, żę śrubka wejdzie pod niewielkim kątem. Tak, to jest właśnie ten moment, w którym ustawiamy współosiowo kontroler lotu, ramkę od nadajnika FPV i wreszcie sam kadłub. Śrubka wchodzi w boczne słupki, na których osadziliśmy FC i przy okazji trzyma kadłub w miejscu. Antenę FPV wyprowadzamy oczywiście tyłem starając się ją tak ułożyć, aby nie wchodziła w kolizję ze śmigłami. Możemy ją lekko wygiąć, aby wychodziła dokładnie wzdłuż osi ramy.
W przypadku składania, czy wymiany silników w Beta85 mamy uproszczone zadanie, ponieważ przewody są zakończone wtyczkami, zaś kontroler lotu ma odpowiadające im gniazda. Wystarczy więc włożył silniki w obejmy w ramie i wpiąć je do kontrolera lotu.

Nim rzucimy się do zakładania silników musimy jeszcze odpowiedzieć sobie na pytanie, który z nich będzie pracował zgodnie z ruchem wskazówek zegara (ang. CW - Clockwise), a który przeciwnie (CCW - Counter-Clockwise). Producent na szczęście na swojej stronie rozwiewa wątpliwości. Przewody czerwono-niebieskie to silnik CW, zaś biało-czarne to CCW. Dla przypomnienia - domyślnie w Betaflight i pozostałych rodzajach oprogramowania, lewy-przedni i prawy-tylny silnik obracają się zgodnie z ruchem wskazówek zegara. Dwa pozostałe przeciwnie. Wiemy już więc jak podłączyć silniki, więc do roboty!

Kolejne silniki musimy po prostu wcisnąć w plastikową obejmę. Uczulam, aby naciskać z góry na korpus silnika, a nie na wystający wałek. Inaczej ryzykujemy jego uszkodzenie. Zacząłem, jak widać poniżej, od przedniego-lewego silnika, więc ma on czerwono-niebieski przewód.

Obejma trzymająca silnik ma u dołu lekkie obniżenie, aby zmieściły się tam przewody. Zwróćmy jednak uwagę, czy po włożeniu silnika nie są one zmiażdżone, ponieważ wtedy nie posłużą nam zbyt długo.
Wtyczka od silnika ma asymetrycznie przesunięte otwory, więc trudno jest ją włożyć źle, ale jeśli ktoś ma w zwyczaju robić takie rzeczy na siłę to warto zerknąć, czy aby na pewno mamy ją właściwie obróconą. Po podłączeniu silnika warto jeszcze wprowadzić przewód w wyżłobienie w ramie, aby nie wisiał luźno. Dzięki temu nie będzie ryzyka, że gdzieś nim zahaczymy, dostanie się w śmigło, bądź zerwiemy go podczas wkładania baterii.
Po zamocowaniu silników możemy wreszcie założyć śmigła. Oczywiście jest to nietrywialne zważywszy na to, że BetaFPV nie opisuje kierunku ich obrotów. Swego czasu pisałem o tym, jak powinny być założone śmigła. Jeśli obraca się ono zgodnie z ruchem wskazówek zegara [ang. CW] (decyduje o tym silnik), to powinniśmy wybrać to, które podczas tej rotacji będzie miało wiodącą górną krawędź płata. Innymi słowy, ta część śmigła, która jest wyżej (patrząc z boku) idzie pierwsza podczas obrotu, gdy patrzymy z góry, albo z boku. Jeśli opis Was nie przekonuje, to polecam po prostu spojrzeć na zdjęcie ;) No i przypominam, że te same śmigła leżą zawsze po skosie, a obok siebie znajdują się te o przeciwnych kierunkach.

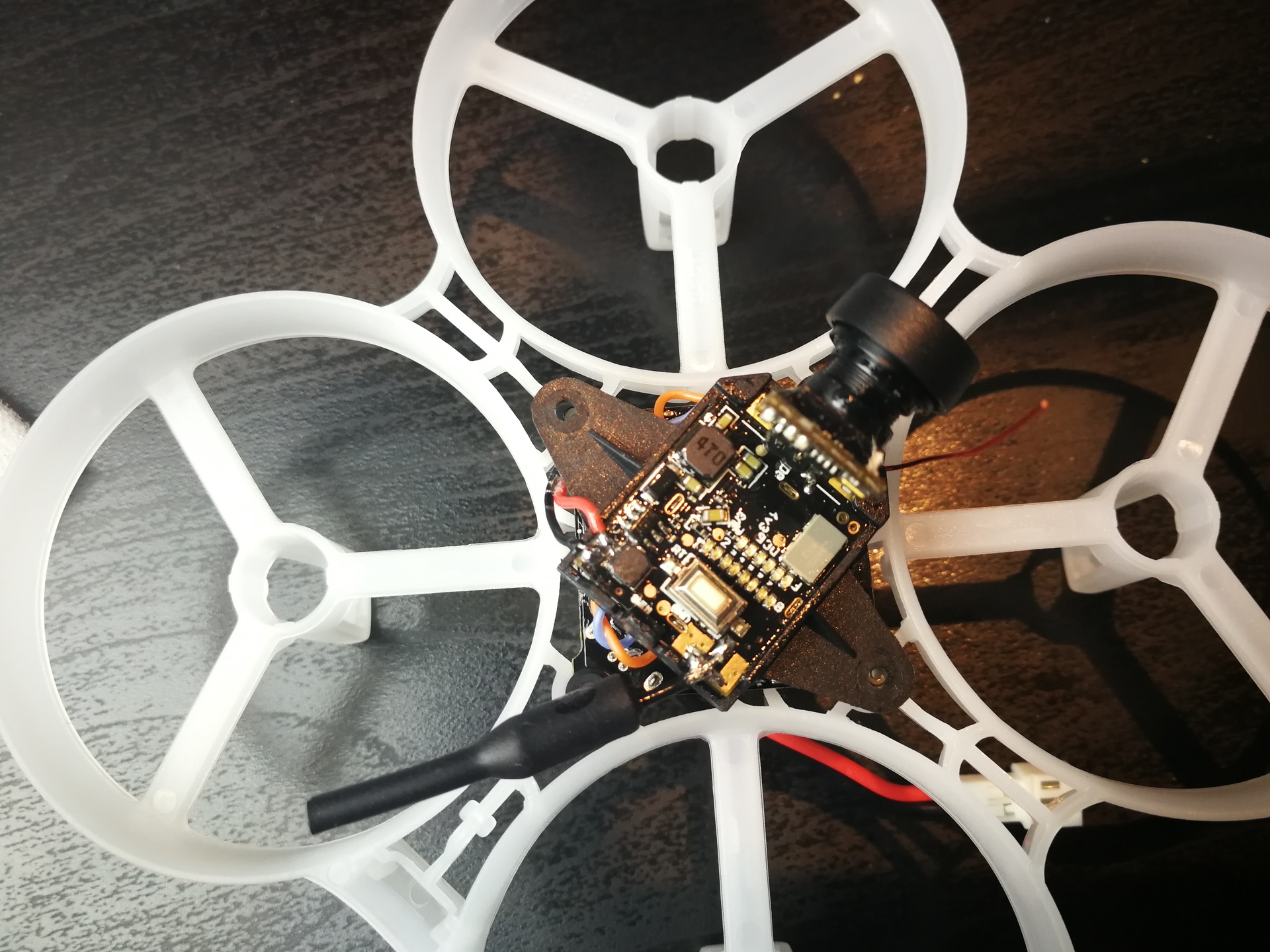
Po zamocowaniu i podłączeniu wszystkich czterech silników całość powinna wyglądać bardzo schludnie i uporządkowanie. Przewody wpuściliśmy w korytka w ramionach, więc nie zahaczymy nimi o nic w trakcie lotu. Zwracam też uwagę na kolorystykę przewodów silnikowych. Na zdjęciach dokładnie widać, jak je podłączyłem. Kierunek ustawienia kontrolera lotu ustalicie po porcie microUSB, który wychodzi z tyłu i przyciskach znajdujących się w przedniej części. Zwracam także uwagę na to, że kontroler lotu najlepiej jest obrócić w ramie tak, aby bateria była ustawiona wzdłuż, a nie w poprzek niego, czyli tak jak na zdjęciu. Po założeniu pakietu przykryje on port microUSB i przyciski.
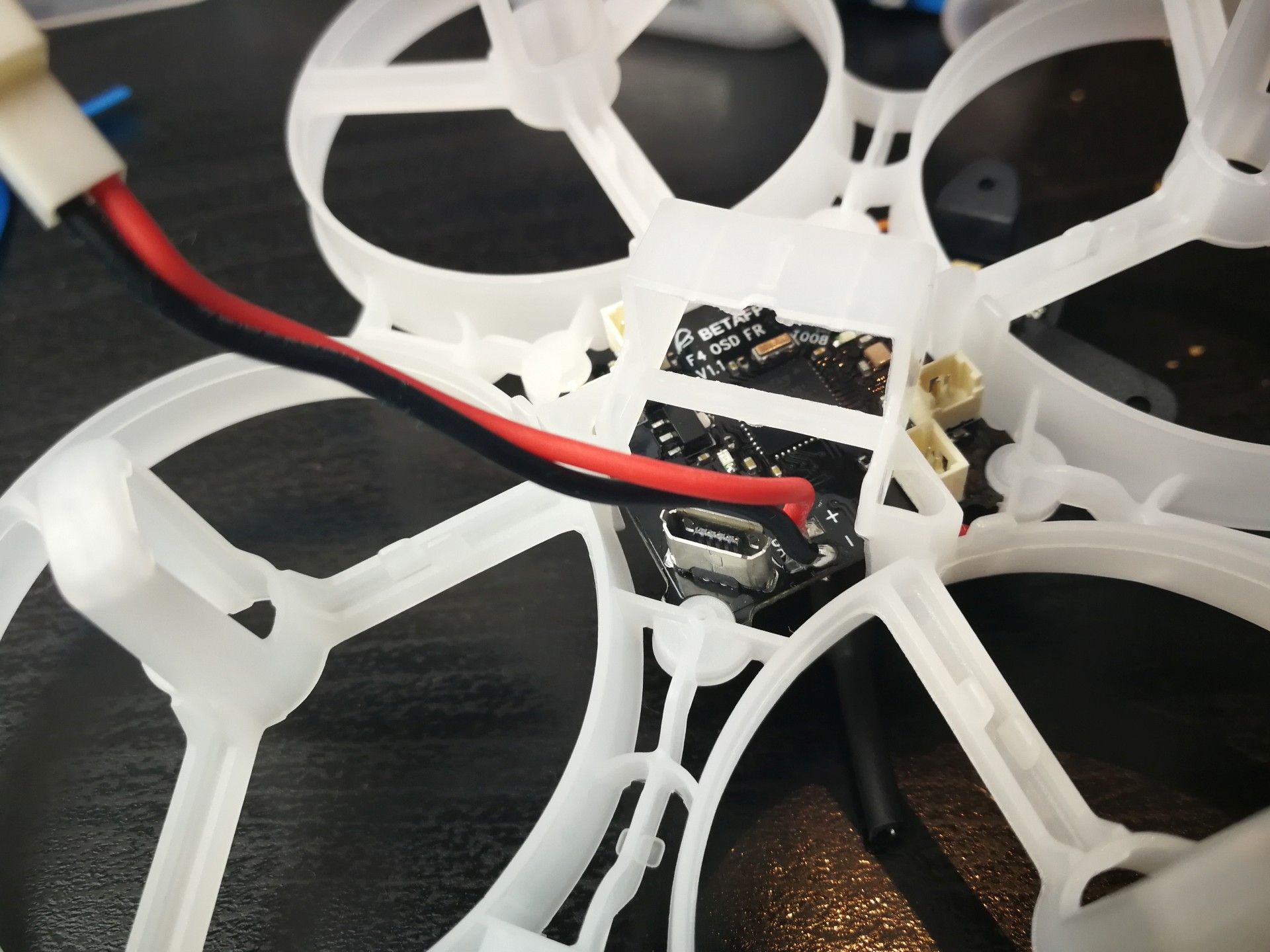
Z uwagi na to, że będziemy co chwila podłączać i odłączać kolejne pakiety Li-Po, całe naprężenie przewodu zasilającego przełożyłoby się na miejsce lutowania na kontolerze lotu. Aby zabezpieczyć je przed zbyt szybkim zmęczeniowym zużyciem, dobrze jest przenieść to obciążenie na przewód i jego silikonowy oplot. Ja przypiąłem go do ramy za pomocą małej opaski zaciskowej (tzw. "trytytki"). Tym sposobem gdy wypinam, albo podłączam baterię, przewód nie pracuje w miejscu lutowania, a więc nie powinienem go tak szybko zerwać.
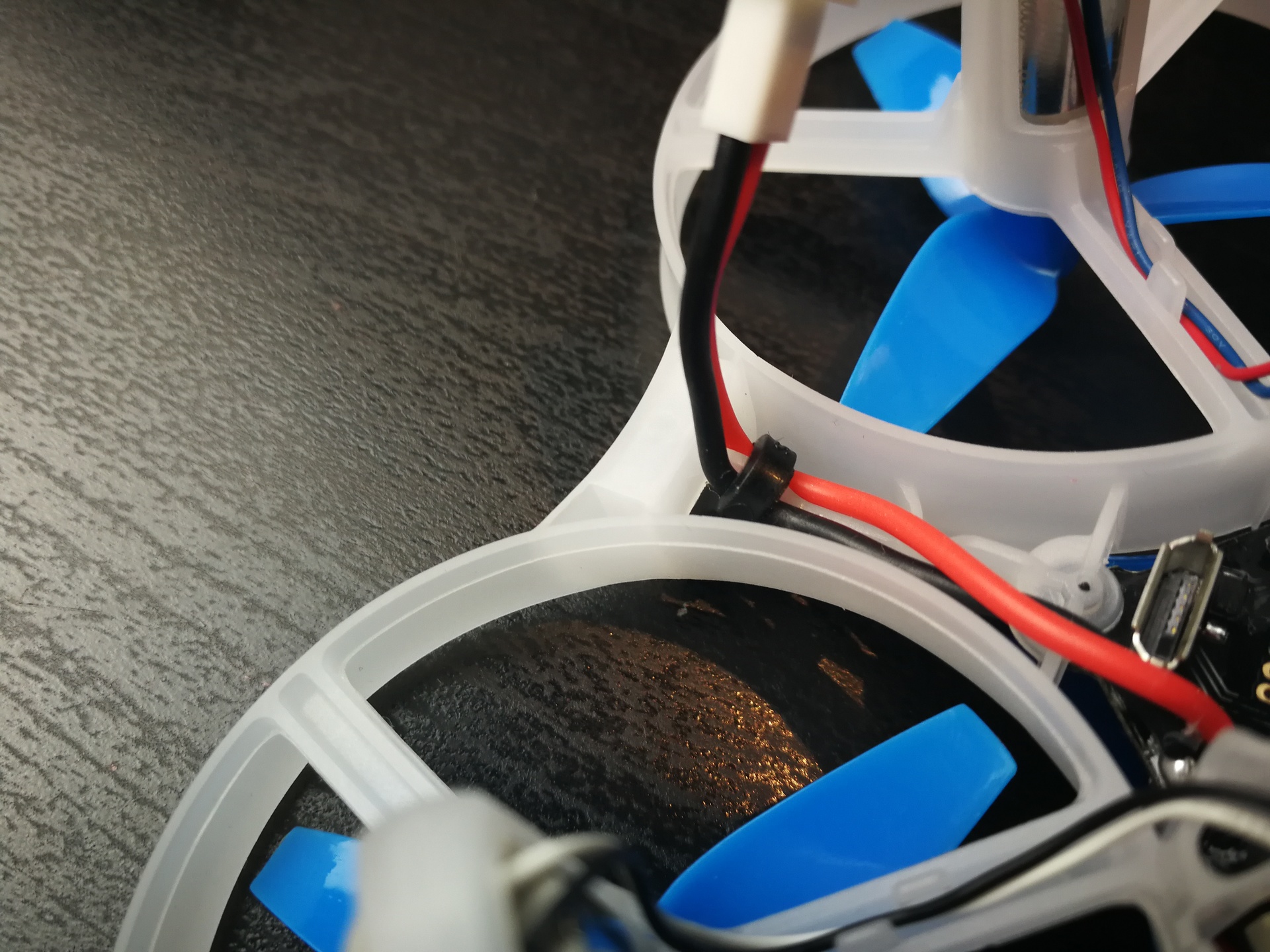
Z wierzchu widoczna jest jeszcze opaska, której koniec obciąłem z oczywistych względów. Warto też zerknąć na prowadzenie anteny od nadajnika FPV. Dość sztywno utrzymuje ją tył kadłuba, ale po skończeniu montażu upewnijmy się, że nie przesunęła się w okolice pracującego śmigła, bo mogłaby wtedy skończyć przedwcześnie swój żywot.

Nim zakrzykniemy, że praca została zakończona, pozostaje jeszcze antena odbiornika. Ta nie jest najszczęśliwiej wykonana ani umieszczona. Użytkownicy Beta85 i innych kopterów tej firmy skarżyli się na nagłe utraty sterowania w wersji z odbiornikiem FrSky. Było to spowodowane niefortunnym ułożeniem niewielkiej anteny, więc sam producent zaleca wyprowadzić ją na sztorc w górę, wzdłuż kadłuba.

Oczywiście tak ustawiona antena natychmiast wygnie się w dowolną stronę przy upadku, więc należy ją zabezpieczyć. Ja użyłem banalnego, ale skutecznego rozwiązania, czyli przykleiłem ją do kadłuba kawałkiem taśmy klejącej. Nazwijcie to prowizorką, ale od parunastu lotów i wielu upadków trzyma się tak samo dzielnie jak na początku. Jeśli więc działa, to może nie jest wcale takie głupie?

I tyle, możemy cieszyć się własnoręcznie złożonym kopterem FPV! Teraz pora nacieszyć się jego wyglądem, nim zacznie zahaczać o bramki, szurać po ziemi i łapać kurz z dywanu!



Pozostaje jeszcze jedno, podstawowe pytanie. Czy on w ogóle będzie latał? O ile założyliśmy poprawnie śmigła i podłączyliśmy właściwie silniki to nic nie powinno go zatrzymać. Jak radzi sobie mały kopterek FPV w ogrzewanej hali garażowej? Ano tak!
A co z konfiguracją Betaflight, który jest wgrany na kontroler lotu? Cóż, tutaj odsyłam do mojego poradnika na Youtube, który wyjaśnia niuanse ustawiania tego oprogramowania. Przypominam tylko o ustawieniu protokołu komunikacji z ESC na "Brushed" - inaczej, niż w kopterach z bezszczotkowymi silnikami :)
I tyle! Życzę Wam powodzenia w składaniu swoich własnych, wymarzonych modeli i szczęśliwych lotów! Do następnego!
P.S. A jeśli spodobał Wam się ten kopter, to rejestrując się w BetaFPV z użyciem tego odnośnika, możecie uzyskać 10% zniżki przy pierwszym zakupie :)
{kind=link}