Autor: Łukasz Froń (a.k.a. Roddy)
MJX Bugs 3 to multikopter, który zdobył niekwestionowaną popularność wśród wielu użytkowników. Ja sam stawiam z nim pierwsze kroki w lataniu FPV. Całkiem udana konstrukcja z silnikami bezszczotkowymi, o długim czasie lotu na baterii, nadająca się znakomicie zarówno do lotów w zasięgu wzroku, jak i do użycia jako platforma FPV. Nic dziwnego, że doczekał się też wielu przeróbek. Przeglądając blogi i kanały youtube znajdziemy mnóstwo patentów, niektóre sklepy internetowe oferują gotowe zestawy części. Ja jednak cały czas miałem wrażenie, że wszystkie te pomysły nie trafiają w moje potrzeby. Czy to trójłopatowe śmigła, czy baterie 3s, cel jest zwykle ten sam - zwiększenie mocy, na której, przynajmniej na tym etapie nauki, nie zależy mi szczególnie. Natomiast podwyższone podwozie i amortyzowany uchwyt do action cama w ogóle nie pomogłyby mi w lataniu FPV.
Tym natomiast, czego mi w Bugsie brakowało, była przede wszystkim możliwość nauki latania w trybie Acro. Poza tym chciałem móc sterować nim z jakiejś standardowej, konfigurowalnej aparatury typu Taranis, a także zintegrować OSD z kontrolerem lotu. Potrzeba matką wynalazków, a zatem postanowiłem wymyślić własny patent na przeróbkę Bugsa. Założyłem, że zdemontuję fabryczną płytę główną, a w to miejsce zainstaluję kontroler lotu z Betaflight, odbiornik i oczywiście płytkę dystrybucji zasilania. Ze względu na koszty, wszystkie pozostałe elementy zdecydowałem się pozostawić oryginalne. Przeróbka miała też być w stu procentach odwracalna, na wypadek gdyby projekt okazał się być niewykonalny w takich założeniach.
Mając już Taranisa Q X7, potrzebowałem odbiornika obsługującego FrSky D16, FC najchętniej na procesorze klasy F4 i PDB pracujące na zasilaniu 2S. Wybór padł na element, który łączy te wszystkie funkcje, a jest to FrSky XSRF4PO. Mój Bugs jest już wyposażony w kamerę i nadajnik FPV, ale chcąc wykonać taką przeróbkę od zera będziecie oczywiście również ich potrzebować. Jeżeli to komuś pomoże w wyborze, to ja użyłem kamery Runcam Swift 2, nadajnika Eachine TX526 i anteny Realacc Pagoda. Warto również zamówić buzzer - FrSky nie dostarcza go w zestawie.
Oto moja kompletna lista zakupów:
MJX Bugs 3
Taranis Q X7
FrSky XSRF4PO
Buzzer
Runcam Swift 2
Eachine TX526
Antena Realacc Pagoda-2
Przeróbka
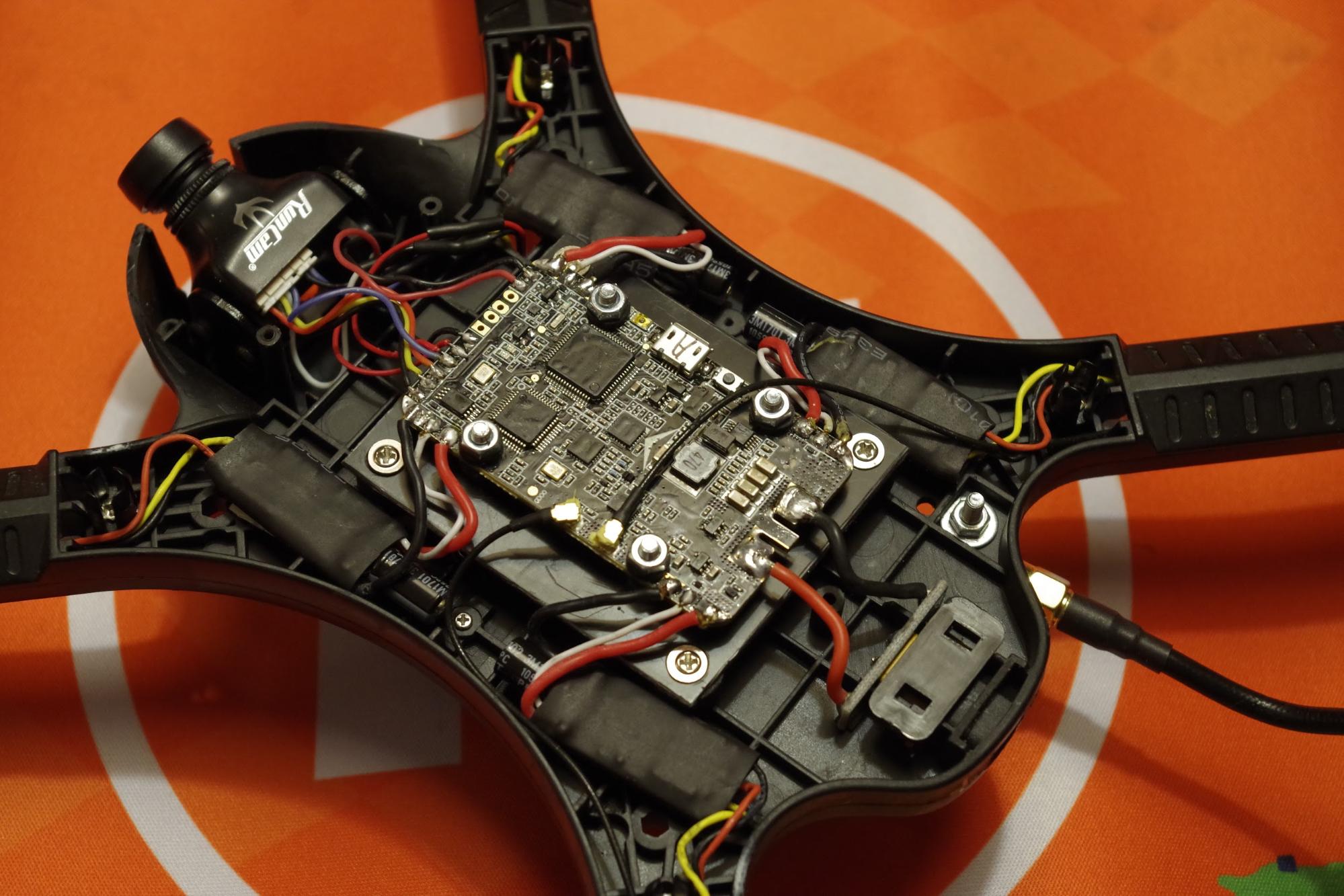
Pierwszym krokiem był demontaż oryginalnej płyty głównej. Poszło całkiem łatwo, mimo kleju, którym producent zasmarował miejsca lutowania przewodów z płyty do ESC. Po odlutowaniu ESC i wyjęciu anteny odbiornika, odkręciłem cztery śruby mocujące płytę i odlutowałem przylutowane pod spodem przewody zasilające.

W następnej kolejności zdecydowałem się na podłączenie nowego FC do zasilania i do jednego ESC, tak na wszelki wypadek sprawdzić, czy aby na pewno XSRF4PO zadziała na zasilaniu 2S (specyfikacja nie podawała tego wprost) i czy dogada się z ESC (do którego w ogóle specyfikacji nie miałem). Baterię podłączałem przez smokestopper i chociaż nie okazało się to konieczne, to ja jednak polecam zainwestować w takie zabezpieczenie. Od razu przekonałem się, że XSRF4PO nie ma absolutnie nic przeciwko zasilaniu napięciem 7.4 V. Nieco trudniej natomiast było nakłonić do współpracy ESC. Zacząłem od protokołu Dshot600 i po kolei próbowałem coraz niższych, ale FC i ESC wciąż byli jak Ray Charles i Stevie Wonder - nie widzieli się nawzajem. Przy protokole Multishot ESC odegrał drugą część melodyjki i już myślałem, że się udało, jednak próba zakręcenia silnikiem przez Betaflight Configurator rozwiała tę nadzieję. Dopiero ustawienie protokołu Oneshot125 spowodowało, że po ruszeniu suwakiem silnik zaczął się obracać.

Wiedząc już, że wybór kontrolera lotu był trafny, przystąpiłem do jego montażu w obudowie Bugsa. Rozstaw słupków był niestety inny, czemu zaradziłem wykonując ze ścianki od jakiejś starej skrzynki narzędziowej i czterech śrub M3x12 prosty stelaż.

Do zamontowania stelaża konieczne okazało się wycięcie jednego słupka montażowego na środku obudowy. Po przykręceniu stelaża do obudowy i FC do stelaża przylutowałem przewody do pozostałych ESC, kamery, nadajnika i buzzera.

Zdemontowałem również paski LED z ramion Bugsa, a w tylnych ramionach umieściłem anteny odbiornika RC. Nylon, w przeciwieństwie do włókna węglowego nie tłumi fal radiowych, a dzięki temu anteny są dobrze zabezpieczone przed uszkodzeniem.

W nadajniku i antenie FPV nic nie zmieniałem, ale jakby ktoś chciał sobie odpatrzyć jak to zrobiłem, to zamieszczam zdjęcie.

Konfiguracja
O podstawowych rzeczach typu zbindowanie odbiornika z aparaturą, wgraniu najnowszej wersji Betaflight, ustawienia trybów itp. itd. nie piszę - jeżeli czegoś nawet nie ma w instrukcji, to w sieci można znaleźć na ten temat wszystko, nie czuję potrzeby odkrywania Ameryki. To natomiast, czego nie znalazłem w sieci, to np. przelicznik dla miernika prądu - fabrycznie było to 400, ale wówczas pomiar prądu był lekko zawyżony. Na tyle, na ile mogłem ufać mojemu amperomierzowi, stwierdziłem że właściwą wartością jest 500. Dla miernika napięcia fabryczny przelicznik 110 jest prawidłowy. Jako typ obu mierników ustawiamy oczywiście Onboard ADC.
W zakładce Configuration ustawiamy odbiornik typu serial-based, a protokół SBUS. Protokół ESC to, jak już pisałem, Oneshot125. Dla Minimum Throttle optymalną wartością jest 1160 - 1175. Częstotliwość próbkowania gyro i PID pozostawiłem oryginalną 8 kHz / 2 kHz. Z ficzerów włączyłem tylko OSD, telemetrię i dynamiczne filtry.
W zakładce Receiver spotkała mnie tylko jedna niezbyt miła niespodzianka, otóż RSSI, które ma być podawane na kanale AUX4 pokazuje cały czas stałą wartość 1971, co odpowiada wskazaniu RSSI na OSD około 97 dB. Podczas lotu wartość ta zaczyna spadać dopiero, gdy kopter oddali się dość znacznie od operatora, więc zalecam w stosunku do niej ograniczone zaufanie. Być może aktualizacja FW odbiornika w przyszłości rozwiąże ten problem. Jest też możliwe obejście polegające na skonfigurowaniu Taranisa, aby podawał RSSI z telemetrii na jednym z kanałów i użyciu tego kanału jako źródła wartości RSSI.
Co do zakładki Modes, to każdy najlepiej ustawi po swojemu. Ja ze swojej strony rekomendowałbym tylko jeden hint. Otóż, skonfigurowałem uzbrajanie tak, aby aktywowanie Prearm i Arm wymagało użycia dwóch przełączników po obu stronach aparatury, a zatem obu rąk. Ponadto ustawienie Prearm dodatkowo aktywuje buzzer na wypadek, gdyby w pobliżu znajdował się ktoś, kogo nie zauważyliśmy, albo też gdyby ktoś omyłkowo zaczął operować naszą aparaturą w momencie, gdy akurat grzebiemy przy kopterze.
Opis konfiguracji w zakładce PID Tuning z premedytacją zostawiłem sobie na koniec, bo z tym było najwięcej zachodu. Jak w starym kawale, dobra wiadomość jest taka, że domyślne wartości z Betaflight sprawdzają się w 95% kopterów. Zła jest natomiast taka, że tak zmodyfikowany Bugs plasuje się w tych pozostałych 5%. Oczywiście mógłbym podać gotowy zestaw parametrów, ale wydaje mi się bardziej wartościowe wyjaśnienie, co z czego wynika. A zatem, będzie teraz trochę teorii.
Strojenie filtrów i PIDów.
Na domyślnych ustawieniach BF na pierwszy, a nawet na drugi rzut oka quad latał całkiem zadowalająco. Jedyne, co mogło niepokoić, to dość krótki czas pracy na baterii, wynoszący około 7 - 8 minut, podczas gdy z oryginalnym kontrolerem lotu było to około 10 - 12 minut. Odczytanie logów potwierdziło moje przypuszczenia, że coś jest nie tak - sygnał z gyro, w szczególności w osi Pitch, wykazywał dość nietypowe wibracje, które PID wzmacniał i przekazywał na ESC.

Analizując to zjawisko doszedłem do następujących wniosków.
Śmigła standardowego pięciocalowca obracają się z prędkością około 15000 - 25000 obrotów na minutę, czyli 250 - 400 obrotów na sekundę. Zatem wszelkie wibracje rejestrowane przez żyroskop, a spowodowane np. niewyważeniem czy uszkodzeniami śmigieł będą miały takie właśnie częstotliwości w okolicach 250 - 400 Hz. Nie-elektronikom wyjaśniam, że ilość Hz (herców) to po prostu ilość cykli na sekundę. Domyślne wartości filtrów notch i lowpass w Betaflight bardzo dobrze wycinają te składowe widma sygnału z gyro.
Bugs ma śmigła znacznie większe, które pracują przy obrotach zdecydowanie niższych, mniej więcej 6000 - 8000, co daje 100 - 130 obrotów na sekundę. Tak więc zakłócenia spowodowane wibracjami śmigieł plasują się w przedziale widma 100 - 130 Hz i przelatują przez domyślne filtry BF jak przez dziurawe sito.
Ponieważ zastosowanie amortyzacji FC nie pomogło i nie było możliwe usztywnienie ramy, mogłem jedynie pomóc zmieniając parametry filtrów. Metodą prób i błędów zdecydowałem się na wartości:
- Gyro Lowpass = 50 Hz
- Gyro Notch 1 = 110 Hz
- Gyro Notch 1 Cutoff = 75 Hz
- Gyro Notch 2 = 220 Hz
- Gyro Notch 2 Cutoff = 175 Hz
- Dterm Lowpass = 60 Hz
Z nowymi ustawieniami, jak widać zdecydowanie lepiej. Czas lotu wzrósł do około 9-10 minut, ale też pamiętajmy, że w acro lata się szybciej niż w trybie stabilizowanym.

Domyślne nastawy regulatorów PID są dość dobre, ale trzeba pamiętać, że dysponując z jednej strony stosunkiem siły ciągu do masy (TWR) na poziomie około 2:1, a z drugiej bezwładnością, której nie powstydziłby się mały słonik, warto jednak poprawić nieco programistów z Betaflight, bo tolerancja jest niewielka. Ponieważ w osi pitch widoczne były duże przesterowania wynikające z nadmiernej reakcji PIDa, postanowiłem obniżyć nieco wartości P oraz I, ponadto jako że kopter ma ramiona w układzie true-X, zrównać parametry dla osi pitch i roll. Z kolei aby zniwelować skutki wspomnianej bezwładności Bugsa, podniosłem też wartości dla D, licząc że nowe ustawienia filtrów dadzą radę. Zdecydowałem się na nastawy:
Pitch i Roll:
- P = 50
- I = 40
- D = 45
Yaw:
- P = 75
- I = 40
Już miałem nadzieję, że okażą się ostateczne, ale w pewnym momencie (albo po którejś kraksie) pojawiło się nieznaczne, ale uciążliwe przechylanie i skręcanie w prawo przy dodaniu gazu, tak jakby jeden z prawych silników niedomagał. Jednakże organoleptyczne sprawdzenie silników i analiza logów tego nie potwierdziły, kontroler lotu po prostu za słabo kompensował asymetrię siły ciągu. Pomogło podniesienie parametrów I. Tak więc optymalne na chwilę obecną nastawy to:
Pitch i Roll:
- P = 50
- I = 50
- D = 45
Yaw:
- P = 75
- I = 50
Jednakże wciąż obserwuję układ i wydaje mi się nie całkiem stabilny przy maksymalnej mocy? Tak więc niewykluczone, że coś jeszcze pozmieniam.
Ustawienia Rate, jak wiadomo, najlepiej jest robić pod siebie. Z technicznego punktu widzenia, na pewno warto radykalnie obniżyć Super Rate, Bugs i tak nie jest w stanie obracać się szybciej niż 240 - 270 deg/s w każdej osi. Moje ustawienia to:
- Rate = 1.00
- Super Rate = 0.40
- RC Rate = 0.00
Jak to lata?
Bugs po przeróbce i skonfigurowaniu lata w moim odczuciu całkiem przyjemnie, oczywiście jak na zainwestowane środki. Najbardziej doskwiera słaby TWR, przez co quad wznosi się, czy odzyskuje wysokość po przewrotach dość ociężale. Również przewroty trwają bardzo długo i traci się przy nich sporo wysokości. Co do szybkości w locie poziomym, to nie jest źle, chociaż wiadomo, że tak szybki jak pięciocalowy racer nie jest i nigdy nie będzie. Może warto próbować dalszych modów - śmigieł, baterii, silników, itp. itd.? Jednak osobiście obawiam się, że w ten sposób szybko doszłoby się do stanu, gdzie z oryginalnej konfiguracji zostałaby tylko rama. Czyli koszty rosną, a rezultat niepewny i raczej nieopłacalny, dlatego z rozmysłem zrezygnowałem z dalszych modyfikacji. Reasumując, do racingu czy freestyle’u się nie sprawdzi, natomiast może być całkiem dobry do nauki latania w acro, czy do spokojnych lotów long range. Osobiście lubię też ten niski dźwięk wolnoobrotowych śmigieł, nie do podrobienia i nie do pomylenia z niczym innym.
Doświadczeni piloci raczej nie będą pod wrażeniem moich zmagań i skromnego sukcesu... Ale może chociaż się uśmieją.
Masz pytania, uwagi, pomysły, propozycje zmian? Podziel się w komentarzach!
{kind=link}