Uwaga! Ten wpis powstał już spory czas temu i obecne metody składania kopterów zmieniły się dość znacznie! Poszukaj proszę bardziej aktualnego artykułu. https://4smigla.pl/jak-nie-skladac-koptera-w-2019-roku/
W poprzedniej części skończyliśmy na przylutowaniu ESC, czyli regulatorów obrotów oraz przewodu zasilającego wraz z końcówką XT60. Dziś pora na oświetlenie oraz regulator napięcia dla kontrolera lotu. Zapraszam !
Nasza PDB ma jeszcze trochę wolnego miejsca. W zestawie dołączone były LEDy, które montuje się w przedniej i tylnej części ramy. Po ich podłączeniu do PDB moglibyśmy uznać ten temat za zakończony, gdyby nie to, że zamontowane ESC to typ OPTO. Jak może pamiętacie, nie mają one regulatora napięcia 5V, który zasiliłby kontroler lotu. Z moich ESC wychodzą tylko 2 żyły, zamiast 3 - jedna jest sygnałowa (biała), a czarna to masa. Gdybym podłączył teraz regulatory obrotów tymi przewodami do kontrolera lotu to nie otrzyma on zasilania. Musimy je podać osobno wykorzystując do tego regulator napięcia dający na wyjściu 5V. Ja użyłem dokładnie takiego: Banggood - UBEC 5V.
Uwaga - są płytki dystrybucyjne, które mają od razu regulatory 5V i 12V, więc wtedy wystarczy tylko przylutować 2 przewody do wyjścia 5V, a ich drugą stronę podłączyć bezpośrednio do dowolnego, wolnego wejścia ESC na kontrolerze lotu. To będziemy jeszcze omawiać w kolejnej części podczas jego montażu.

Jak widać na zdjęciu - regulator napięcia nie jest specjalnie skomplikowany. Z jednej strony mamy 2-żyłowy przewód, który musimy przylutować do PDB - dowolna para pól lutowniczych + / -, gdzie tylko znajdziemy miejsce. Może być tam, gdzie jedno z ESC. Druga strona regulatora jest już zakończona 3-pinowym złączem identycznym z tymi na ESC, jednak z zestawem przewodów - czerwonym (zasilanie) i czarnym (masa). Zwróćcie też uwagę na to, że układ samych przewodów we wtyczce jest inny. W ESC obsadzony był pin 1 i 3 (dwa skrajne). Tutaj przewód czerwony wchodzi w środkowy pin - 2. Jeśli spojrzy się na kontroler lotu to jest to dość oczywiste, ponieważ 3-pinowe złącze na ogół ma następującą kolejność:
Pin 1 - S (sygnał)
Pin 2 - + (zasilanie)
Pin 3 - - (masa)
W tym kontekście wyjście z regulatora to piny 2,3; natomiast z ESC to piny 1,3.

No dobrze, pora przylutować regulator napięcia do PDB. Z racji tego, że miejsca, w których przyłączaliśmy ESC są już zabezpieczone lakierem - lepiej zostawić je w spokoju. Na płytce mamy jeszcze pola lutownicze z przodu i z tyłu oraz na rogach - na każdej parze będziemy mieli napięcie zasilania, czyli bezpośrednie połączenie z baterią (nie przez regulator napięcia). Punkty w narożnikach zostały zasłonięte przez ESC i szczerze mówiąc wolałbym pod nimi nie umieszczać przewodów, które byłyby izolowane jedynie folią termokurczliwą od regulatora obrotów. Z tego względu wolę się dolutować do punktów z przodu lub z tyłu.

Jak pamiętacie, te z tyłu są już zajęte przez główny przewód zasilający. Nie przeszkadza jednak w tym, aby tak cienkie przewody dolutować do już zamocowanych - byle dobrze się to wszystko trzymało. Jest jednak pewien powód, dla którego regulator przylutuję z przodu. Komplet zawierał paski LED, które oświetlają spód quadrocoptera - jeden zestaw z przodu, drugi z tyłu. Te drugie najlepiej przylutować z tyłu PDB, a dzięki temu przednie diody możemy razem z regulatorem umocować z przodu.

Ponieważ nie mam zdjęcia, które przedstawia sam przylutowany regulator napięcia, po prostu załóżmy, że czerwony przewód łączymy z polem z przodu, które jest oznaczone '+', natomiast czarny trafi do '-'. Późniejsze zdjęcie będzie pokazywać wszystkie przewody, które zamocowaliśmy.
Przejdźmy teraz do montażu oświetlenia w modelu. Producent przystosował ramę do zamocowania LEDów od spodu w przedniej i tylnej części głównej płyty. Paski diodowe wyglądają identycznie, ale jeden z nich świeci na biało, drugi na czerwono. Aby przekonać się, który z nich należy umieścić po której stronie, możemy podłączyć je bezpośrednio do baterii i zobaczyć, jaki mają kolor. Oczywiście przytykanie luźnych przewodów do baterii i LEDów rodzi ryzyko zwarcia, więc jeżeli nie czujecie się zbyt pewnie w rzeczach manualnych to bezpieczniej jest najpierw przylutować przewód do diod, a potem dopiero przytknąć przewody do baterii. Niezależnie od wybranej ścieżki kluczowe jest to, żeby czerwony przewód zetknąć z '+' na LEDach oraz właściwej końcówce baterii. Analogicznie wykorzystujemy czarny przewód. Operację można wykonać samodzielnie, ale trzecia i czwarta ręka nie zaszkodzą. Poniżej zdjęcia, które pokazują, jak sprawdziłem, które LEDy mają jaki kolor.



Jak widać na powyższych zdjęciach, we wtyczkę XT60 włożyłem odpowiednio czerwony i czarny przewód, a następnie zgodnie z oznaczeniem na samych LEDach, przytknąłem do nich drugi koniec przewodu. Przy tak wysokim napięciu (3-4S) należy uważać zarówno na polaryzację (podłączenie zasilania odwrotnie) i w ramach możliwości nie doprowadzać też do zwarcia - zetknięcia końcówek przewodów ze sobą (uwaga na baterię!).

Po sprawdzeniu, które diody mają się znaleźć z przodu i z tyłu możemy przystąpić do ich podłączenia. Najlepiej zacząć od przylutowania przewodów przy samych diodach. Skrócimy je później, już po zamontowaniu.
Krok pierwszy to nałożenie cyny na pola lutownicze, a następnie pokrycie nią końcówek przewodów.

Potem wystarczy tylko przytknąć lutownicę do miejsc, w których mają znaleźć się przewody i gdy cyna się rozpuści, po prostu zanurzyć w niej ich końcówki. Voila!

Jeśli chodzi o paski LED, które mają oświetlać nasz quadrocopter to należy tylko sprawdzać, jak mają być zasilane. Są takie, które wymagają napięcia 5V i wtedy nie moglibyśmy ich podłączyć bezpośrednio do baterii. Musiałyby być zasilane poprzez regulator napięcia - tak samo jak kontroler lotu. Zestaw, który był dołączony z tym quadrocopterem, co było widać na zdjęciu powyżej, ma oznaczenie 12V i takiego napięcia diody się spodziewają. Podanie im zasilania 5V najprawdopodobniej spowodowałoby, iż lekko by się rozżarzyły, zamiast zaświecić. Z kolei w sytuacji odwrotnej diody albo tylko by mignęły i natychmiast się spaliły, albo też nie zapaliły w ogóle. Polecam czytać opisy, aby takiego błędu nie popełnić.
Zapewne niektórzy zastanawiają się, czy podłączenie baterii 4S (14.4V) zniszczyłoby diody, które są dedykowane pod 12V, czy też nie. Okazuje się, że takie napięcie jest dla nich do udźwignięcia. Wiele osób na forach podaje, że tak właśnie je zasilają i nawet, jeśli w pewnym stopniu skróci to ich żywotność, to i tak będą świecić wystarczająco długo. Potwierdzam - te, które montowaliśmy, świecą i mają się dobrze! Oczywiście ta reguła przestaje działać, gdy użyjemy baterii 5S (18.5V), czy 6S (22.2V). Te, jeśli nawet nie od razu, na pewno spalą nasze LEDy!
Zanim przylutujemy diody do płytki dystrybucyjnej, powinniśmy jeszcze skrócić ich przewody. Jak zawsze największym problemem jest zbyt ochocze ich przycięcie, przez co nie będzie się dało ich później zamontować, bo nie starczy długości kabli. W przypadku tego quadrocoptera wystarczyło położyć płytkę dystrybucyjną obok ramy, na tej wysokości, na której miała być zamontowana, a następnie to samo zrobić z diodami. Dla bezpieczeństwa warto zostawić margines ok. 2 cm, na późniejsze poprawki. Chodzi o to, żeby przewód nie wisiał zupełnie luźno, ale odrobinę zapasu zawsze można zebrać i przymocować opaską do ramy.

Na zdjęciu powyżej widać przy okazji, że miejsca lutowania pokryłem wspomnianym już wcześniej lakierem do zabezpieczania elektroniki. Co prawda sama rama nie przewodzi prądu, ale wystarczy wilgoć, która mogłaby doprowadzić do korozji i późniejszego zwarcia. Lepiej zawczasu zabezpieczyć takie miejsca, szczególnie jeśli znajdują się pod samym quadrocopterem (wilgotna trawa itd.).
Pora na przylutowanie regulatora napięcia i przewodów od diod do naszej płytki dystrybucyjnej. Zgodnie z planem diody z przodu łączymy z polami lutowniczymi w przedniej części PDB, wraz z regulatorem napięcia. Zasilanie tylnych LEDów z kolei podłączymy do przylutowanych wcześniej przewodów zasilających. Ważne, aby w trakcie tej operacji dopilnować zarówno tego, żeby nie odlutować oryginalnych przewodów, jak i te nowe zanurzyć w cynie na tyle głęboko, aby nie oderwały się przy lekkim szarpnięciu.

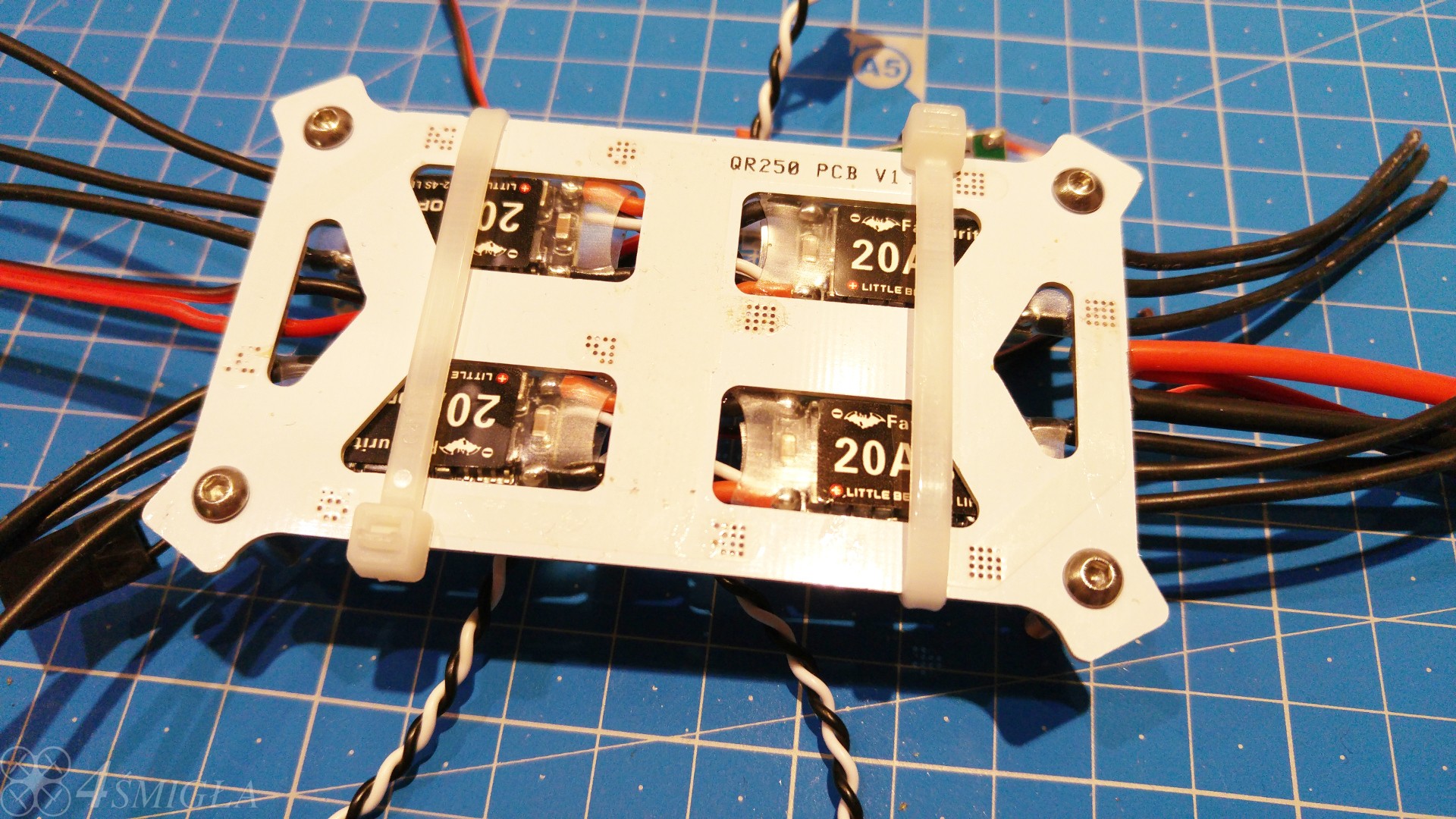
Warto jeszcze spojrzeć na to, w którą stronę wychodzą poszczególne przewody. O ile diody i zasilanie skierowane są na zewnątrz, to regulator napięcia wlutowałem tak, aby kable były skierowane w stronę środka płytki. Dlaczego w taki sposób? Otóż regulator będę chciał umieścić w okolicach kontrolera lotu, który znajdzie się na powierzchni ramy. Cała płytka dystrybucyjna zostanie zamontowana pod spodem, wobec czego zarówno przewody sygnałowe od ESC, jak i zasilanie 5V będzie musiało jakoś trafić na powierzchnię ramy. Prowadzenie przewodów po zewnętrznej stronie jest niemądre, ponieważ ryzykujemy, iż śmigła podczas pracy o nie zahaczą. Im bardziej schowamy je wewnątrz ramy, tym mniejsze ryzyko, że przypadkiem je uszkodzimy. Z tego względu producenci ram wycinają w środku wiele otworów, przez które można przeciągać przewody jednocześnie nie eksponując ich poza obrysem. Nim przykręcimy płytkę PDB do spodu ramy, przeciągnijmy więc kable sygnałowe od ESC oraz sam regulator napięcia.

Płytkę dystrybucyjną montujemy na aluminiowych dystansach, aby nieco odsunąć ją od dolnej części ramy. Całość przykręcamy czterema śrubkami - końcówki imbusowe. Z kolei LEDy montujemy przy pomocy dwóch maleńkich śrubek wkręcanych bezpośrednio w otwory w ramie.


Uff, zaczyna się robić coraz bardziej gęsto, a liczba przewodów wcale się nie zmniejsza. Następnym krokiem będzie montaż silników, które będzie trzeba zlutować z przewodami od ESC. Wtedy będzie można całość nieco uporządkować i zająć się kontrolerem lotu.
Do następnego!
{kind=link}