Zabrałem się za temat, który nie jest łatwy, a moja wiedza z zakresu fizyki jest co najwyżej "akurat", żeby zająć się niuansami właściwości aerodynamicznych quadrocopterów. Nie martwcie się jednak, "wtopy" nie będzie :P
Ołowki w dłoń i lecimy !
Model płaski
Wyobraźmy sobie na chwilę, że mamy całkowicie symetryczny i idealnie wyważony kij. Jak wiadomo, ma on 2 końce :P. Jest podparty w swoim środku ciężkości, czyli dokładnie w połowie długości, co powoduje, że nie przechyla się w żadną ze stron.

Nasz kij posiada określoną masę m, więc jest przyciągany przez Ziemię zgodnie z wzorem na siłę: F = m * a. a to oznaczenie przyspieszenia. W naszym przypadku wynika ono z grawitacji, czyli stosujemy przyśpieszenie ziemskie oznaczane literką g. W przybliżeniu wynosi ono: 9.81 m/s^2.
Przykładowo, dla kija o wadze 100g, siła grawitacji działająca na niego to 0.1kg * 9.81 m/s^2, co daje około 0.981 N (czyli Niutonów).

Siła działa równomiernie na cały kij, jednak nie chcemy się bawić tutaj w całki, więc musicie mi uwierzyć na słowo, że tą samą, pojedynczą siłę działającą na kij, możemy podzielić dowolnie na n części, z których na każdą z nich będzie działać siła o wartości m/n * g, czyli całkowita masa kija, dzielona przez liczbę części i mnożona razy przyspieszenie ziemskie. Jest to intuicyjnie wyczuwalne, bo jeśli złamiemy kij na pół, to będzie on o połowę lżejszy. Tak samo możemy podzielić kij na 5 części, jak na rysunku poniżej itd. Zauważcie, że zsumowanie wartości liczbowej każdej z sił da nam dokładnie Fg. Zapamiętajmy tą właściwość.

Gdybyśmy teraz podnieśli go i puścili - spadłby, ponieważ nie ma żadnej siły, która utrzymywałaby go w powietrzu. Gdyby miał zawisnąć w przestrzeni, potrzebowalibyśmy wyrównać działającą siłę ciężkości drugą, o przeciwnym zwrocie, czyli działającą dokładnie w górę. Jeżeli chwycimy kij w dłonie, to działa on na naszą dłoń siłą Fg, dlatego czujemy jego ciężar. Utrzymując go w powietrzu zaczynamy działać siłą równą Fg, ale skierowaną w górę. Nazwijmy ją Fc. c ponieważ będzie ona w przyszłości siłą ciągu kręcących się śmigieł.

Obie siły są w równowadze, więc nasz obiekt wisi w powietrzu. Jesteśmy już blisko analogii quadrocopterowej. Skoro na kij działa jedna siła, z góry i z dołu, to możemy równie dobrze powiedzieć, że na każdą z jego połówek działa połowa każdej z sił Fg / 2 oraz Fc / 2. Wyjaśnialiśmy to chwilę temu powyżej.

Skąd wziąć siłę Fc ? Zamontujmy silniki, które będą ciągnąć quadrocopter w górę. Na razie ustalmy, że nasz quadrocopter jest "płaski" i stanowi patyk z przymocowanymi dwoma silnikami. Napęd na każdym z ramion musi działać z siłą zdolną równoważyć Fg / 2 (za każdą z dwóch połówek kija). Skoro w zawisie Fg = Fc, to siła generowana przez jeden silnik wynosi Fc / 2.

Z modelu 2D do 3D
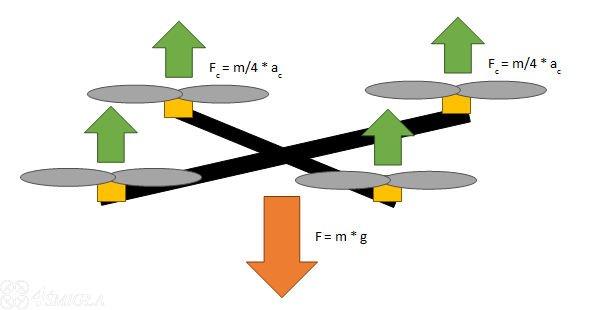
No dobrze, ale przecież quadrocopter nie jest płaski ! Fakt, musimy stworzyć model przestrzenny. Jak pamiętamy, w przypadku naszego kija, środek ciężkości wypadał w połowie jego długości. Jeśli rozszerzymy to na płaszczyznę, to będzie się on znajdował dokładnie w połowie jej długości (to już znamy) i szerokości (przez analogię ustawienia kija prostopadle do tego, który rozpatrywaliśmy). Nasza płaszczyzna wciąż jest przyciągana z tą samą siłą. Żeby unosiła się w miejscu, potrzebujemy wyrównać siłę grawitacji Fg = m * g. Jak pamiętamy, musimy doprowadzić do sytuacji, gdzie Fg = Fc. Przy dwóch silnikach potrzebowaliśmy, aby każdy z nich "ciągnął" model w górę z siłą Fc / 2. Z racji tego, że nasz model ma 4 jednostki napędowe, każda z nich (działając tak samo jak inne) potrzebuje więc wytworzyć siłę ciągu równą 1/4 Fg. Oznacza to, że każdy silnik musi zadziałać z siłą Fc / 4. Jeśli to nie jest jasne, to wyobraźcie sobie, że dzielimy kostkę ciasta o masie 400g na 4 części, w połowie jego długości i szerokości. Ile waży każdy kawałek ? 400g / 4 = 100g. Czyli ciasto ciągnięte było ku ziemi z siłą Fg = 400 g * 9.81 m/s^2. Teraz na każdy kawałek ciasta działa: Fg = 100 g * 9.81 m/s^2. Dlatego też każdy z silników dźwiga niejako 1/4 całej wagi quadrocoptera. Poniżej ilustracja.

Latająca płaszczyzna z obrazka poniżej dalej jednak nie przypomina w pełni naszego quadrocoptera, prawda ? Otóż cienkie ramiona, na których zamocowane są silniki mają wbrew pozorom tą samą właściwość, jak nasza płaszczyzna. Są one wszystkie tej samej długości, z zachowaną symetrią zarówno wzdłuż osi quadrocoptera, jak i w poprzek. Patrząc jeszcze inaczej, gdybyśmy zaczęli z każdej strony płaszczyzny odcinać tej samej wielkości kawałki o trójkątnym kształcie, uzyskalibyśmy w wyniku coś, co przypomina już bardzo mocno naszą ramę.

Brawo ! Potrafimy już opisać dlaczego nasz quadrocopter wisi w powietrzu i jak mają się do tego silniki i śmigła. Jak mówią, co się uniosło, musi spaść, więc teraz popatrzymy, w jaki sposób nasz quadrocopter zmienia wysokość lotu.
Wznoszenie i opadanie
Co bardziej wnikliwi pewnie już znają odpowiedź, ale my musimy jeszcze chwilę się zastanowić, skąd się bierze wznoszenie i opadanie. Chwila dla Was na zastanowienie, a ja zaraz wyjaśnię.
Wróćmy na chwilę do sił działających na quadrocopter. Gdy są one w równowadze, czyli Fg = Fc, pojazd wisi na jednej wysokości. Żeby wprowadzić go w ruch pionowy, musimy tą równowagę zachwiać. Wznoszenie uzyskujemy poprzez zwiększenie siły Fc. Jeżeli nierówność Fc > Fg będzie zachowana to quadrocopter będzie się unosił w górę.

Dlaczego ? Jak pamiętacie, żeby się wznieść musimy lewym drążkiem aparatury dodać gazu. Silniki przyśpieszają, powodując tym samym szybsze obroty śmigieł. Te ostatnie zaczynają ciągnąć quadrocopter w górę z większą siłą niż poprzednio. Możemy więc Fc rozbić na dwie składowe. Jedna kompensuje siłę grawitacji, co w efekcie powoduje, że obie te siły się znoszą. W obliczeniach moglibyśmy równie dobrze założyć, że ich wcześniej nie było.

A co z drugą składową ? Jest ona tym "nadmiarem" siły Fc, który wykracza ponad liczbową wartość Fg. Po zniesieniu się wspomnianych wyżej sił, ta będąc jednocześnie wypadkową Fc i Fg ciągnie właśnie nasz quadrocopter w górę. Uproszczenie to przedstawione jest poniżej.

Opadanie jest oczywiście procesem odwrotnym, w którym zmniejszając siłę ciągu poprzez ograniczenie ilości gazu, pozwalamy sile Fg przekroczyć wartość Fc, czyli Fc < Fg. Dopóki ta nierówność pozostaje spełniona, dopóty quadrocopter będzie opadał. Prędkość jego opadania będzie zależała od tego, ile gazu pozostawimy. W skrajnym wypadku siła Fc zaniknie i zostanie tylko Fg, co znamy z początkowego rysunku. Stanie się oczywiście tak, gdy zupełnie puścimy drążek gazu.
Podsumowanie
Świetnie ! Po tym wstępie wiemy, dlaczego quadrocopter unosi się w powietrzu i w jaki sposób wnosi się i opada. Zaczęliśmy od prostego, płaskiego modelu z dwoma silnikami. Tam przyjrzeliśmy się grawitacji, równowadze sił i temu jaki ciąg muszą wygenerować śmigła, aby nasz model nie spadł z hukiem na ziemię. Następnie przenieśliśmy to na szkic trójwymiarowy, który wyglądał już praktycznie tak, jak nasz quadrocopter. Na końcu wywnioskowaliśmy, jak musi zmieniać się siła ciągu, żeby model się unosił i opadał.
W kolejnej części spojrzymy na to, jak poruszać się w przestrzeni. Przygotujcie się na wypadkowe sił i nieco trudniejsze zagadnienia. Nie ma jednak strachu - wytłumaczę wszystko tak, żeby wszyscy zrozumieli ! Do zobaczenia i udanych lotów !
Uwagi końcowe
Bardziej obeznane z fizyką osoby mogą mieć mi za złe upraszczanie niektórych opisów. Wierzę, że droga do zrozumienia biegnie przez prostotę. Aby jednak nikt nie czuł się wprowadzony w błąd, parę uwag końcowych.
Siła jest wektorem, a więc istotne jest w którą działa stronę, a także gdzie znajduje się jej punkt przyłożenia. W przypadku naszych przykładów z kijem przymknęliśmy na to oko, jednak zachowywałem z grubsza punkt, w którym ona działała.
Jeżeli ktoś ma mi za złe infantylne podejście do tematu, to chciałbym na swoją obronę podać fakt, że nie każdy czytający mój blog musi być z tym tematem obeznany. Staram się, żeby wszystko było tak proste i intuicyjne, jak to tylko możliwe. W efekcie chodzi o to, żeby zrozumieć dlaczego quadrocopter lata (bądź nie), a nie zdać egzamin (sprawdzian) z fizyki.
Jeżeli gdzieś popełniłem błąd, albo wskazałem rzecz, która jest niezgodna z prawdą, to dajcie proszę znać w komentarzu, a chętnie się poprawię. Ważne jest, żeby ten wpis w szczególności nie wprowadził nikogo w błąd.
{kind=link}