Wiele nowych modeli quadrocopterów jest reklamowane tajemniczym hasłem "headless mode". W tym krótkim wpisie przyjrzymy się, czym on jest i dlaczego nie warto zwracać na niego uwagi.
Normalny tryb lotu
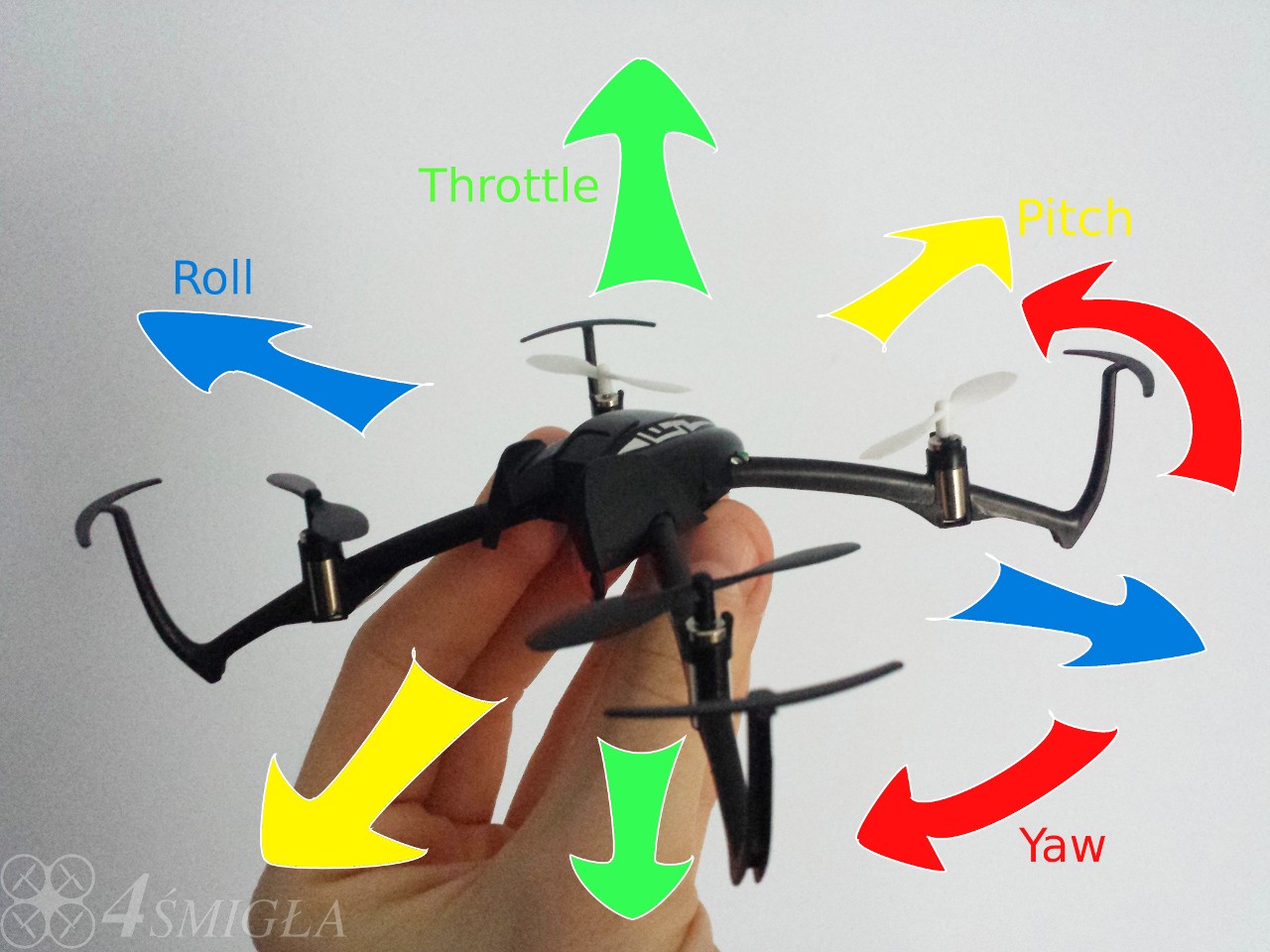
Największym problemem podczas nauki latania modelem 4-kanałowym, takim jak quadrocopter, jest zmiana kierunków sterowania zależnie od orientacji modelu. Gdy jest on skierowany tyłem do nas - kierunki wychylenia prawego drążka odpowiadają dokładnie tym, w które przemieści się quadrocopter. Jeżeli jednak obrócimy go przodem w swoją stronę - lewa strona zamieni się z prawą, a przód z tyłem. Wtedy manipulowanie drążkiem już nie jest takie proste. Sposób poruszania zależnie od orientacji modelu prezentują na ilustracji poniżej:

Tryb headless
Czy nie byłoby łatwiej, gdyby niezależnie od tego, w którą stronę zwrócony jest model - zawsze drążek w przód powodował lot "od nas", w tył "do nas" i odpowiednio w lewo i w prawo ? Tym tropem poszli autorzy trybu nazywającego się "Headless". Opiera się on o magnetometr, czyli po prostu elektroniczny kompas. Na podstawie jego odczytów quadrocopter ustawia sobie kierunki bezwzględne (przód zawsze w tą sama stronę), niezależne od tego, jak sam jest zwrócony. Tym samym, w trybie Headless, przy stałym wychyleniu prawego drążka, quadrocopter będzie się poruszał wciąż w jednym kierunku, nawet jeśli go obrócimy (yaw). Sytuację ilustruje poniższy obrazek:

Czy warto latać w "Headless" ?
Tryb Headless jest przeznaczony dla początkujących. W teorii pozwala on na bardziej intuicyjną kontrolę modelu, ponieważ nie musimy się przejmować "odwracaniem" w głowie kierunków podczas obracania quadrocoptera. No i pociągnięcie prawego drążka do siebie zawsze spowoduje, że będzie on leciał w tył - w naszym kierunku. Tak powinien w każdym razie robić. Jak jest w praktyce ?
Kompas już po góra 30 sekundach latania rozregulowuje się w takim stopniu, że kierunki obracają się o 45 stopni. Z czasem dochodzi już do 90 stopni, czyli prawy drążek pchnięty w przód powoduje lot dokładnie w lewo, lub prawo. Wierzcie mi, można naprawdę szybko się pogubić i nie być w stanie kontrolować modelu. Obracanie się kierunków kompasu następuje stopniowo, ale najpóźniej w połowie spokojnego lotu zauważymy niepokojące efekty tego zjawiska, które nawet dla doświadczonych "lataczy" jest nie do opanowania. Z tego względu gorąco zachęcam, żeby przyzwyczajać kciuki do latania zgodnie ze względnym kierunkiem (tam, gdzie przód quadrocoptera), a nie bezwzględnym (magnetometr). Nie będziecie wtedy zdani na łaskę i niełaskę zawodnego elementu elektroniki, tym bardziej, że nasz mózg dość szybko potrafi się nauczyć sprawnej pracy obydwoma drążkami.
Mimo wszystko chcesz spróbować ?
Sposób na włączenie trybu headless, jeśli quadrocopter oczywiście go obsługuje, jest zawsze opisany w instrukcji i nie ma ogólnej metody - zależy ona od aparatury. Jest jednak jedna cecha wspólna. Jeżeli chcemy latać w trybie Headless to należy przed procesem bindowania z aparaturą (i włączania trybu headless) położyć model dokładnie przed sobą, z przodem ustawionym dokładnie tam, gdzie patrzymy. Innymi słowy model musi być zwrócony swoim tyłem do nas. Wtedy kierunek pchnięcia prawego drążka będzie się faktycznie pokrywał z kierunkiem lotu quadrocoptera, ponieważ każdorazowo kompas kalibruje się zgodnie z początkowym ustawieniem modelu.
Podsumowanie
Uważam, że tryb headless jest tylko chwytem marketingowym, który ma nas przekonać do wyboru danego modelu. Magnetometry stosowane w zabawkowych quadrocopterach są na tyle niedokładne, że szybko gubią właściwy kierunek, a samo latanie w tym trybie nie pozwala wyrobić właściwych nawyków podczas sterowania. Umiejętność obsługi aparatury 4-kanałowej w normalnym trybie pozwala bez dodatkowego wysiłku latać także helikopterami RC, a te ostatnie trybu Headless przecież nie mają. W moim odczuciu więc należy zacząć może od trochę trudniejszej, ale docelowej metody sterowania - bez dodatkowego wspomagania.
Udanych lotów i czekam na Wasze opinie w komentarzach ! Może macie inne przemyślenia ?
{kind=link}