Co pewien czas dostaję mail, w którym opisujecie model z silnikami bezszczotkowymi w wyjątkowo okazyjnej cenie i pytacie, czy warto. Za każdym razem okazuje się, że wpadliście w pułapkę językową. Hubsan, a obecnie również wiele innych quadrocopterów (i hexacopterów) chwali się silnikami bezrdzeniowymi. To jednak coś zupełnie innego niż bezszczotkowe. Jeśli chcecie wiedzieć więcej, zapraszam do lektury !
Zacznijmy od wyklarowania pierwszego określenia. Silnik bezrdzeniowy (coreless) jest rodzajem silnika SZCZOTKOWEGO (brushed motor). Stosowany jest on m.in. w Hubsanie H107C oraz MJX X600. Owy brak rdzenia oznacza różnicę w budowie wewnętrznej, ale nie zmienia sposobu działania komutatora. Ten ostatni, o którym zaraz opowiem, definiuje typ silnika. Komutator mechaniczny stosowany jest w silnikach szczotkowych, elektroniczny (bezstykowy) to domena sprzętu bezszczotkowego.
Silnik szczotkowy z ferrytowym rdzeniem (Brushed iron core motor)

[Źródło: http://www.citizen-micro.com/tec/items/images/cm2.jpg]
Jest to podstawowe i najtańsze źródło napędu. W metalowym korpusie silnika (10) osadzone są magnesy (9), a na obu jego końcach znajdują się łożyska (11, 4), w których pracuje wirnik (5-8). Ten ostatni składa się z wału (5), który obraca się swobodnie w łożyskach (11,4). Jego podstawowa część, przez którą płynie prąd, to uzwojenie (7) nawinięte na, najczęściej żelazny, rdzeń (8), który pomaga ukierunkować pole magnetyczne. Od dołu silnik jest zamknięty plastikowym szczotkotrzymaczem (2), który z jednej strony ma wyprowadzenia, którymi dostarczamy zasilanie (1), a z drugiej kończy się szczotkami (3), które przylegają do komutatora (6). Ten ostatni to rodzaj bębna składającego się z sekcji wykonanych najczęściej z miedzi, która świetnie przewodzi prąd oraz polimerowych przekładek, które działają jak izolator. Szczotki ślizgając się po powierzchni komutatora pozwalają na przepływ prądu przez różne uzwojenia, co jest bezpośrednią przyczyną ruchu obrotowego wirnika. Skąd się to bierze ?
Uwaga, trochę fizyki ! Jeśli nie jesteś specjalnie ciekaw czytaj od razu o silniku bezrdzeniowym ;)
Źródło: Kanał "Learn Engineering" - "DC Motor, how it works ?"
Otóż prąd to nic innego, jak przepływ elektronów, czyli cząstek o ujemnym ładunku. Na cząstkę, która porusza się w polu magnetycznym działa tak zwana siła Lorentza, która jest prostopadła do kierunku poruszania tejże cząstki. Uff, tyle definicji. A jak to wygląda w silniku ?
Magnesy (9) umieszczone na korpusie (10) wytwarzają pole magnetyczne. Jego linie biegną m.in. w poprzek obudowy, od jednego bieguna do drugiego. Elektrony przemieszczają się po uzwojeniu (7) (przepływ prądu) m.in. wzdłuż wału wirnika (5). Ok, czyli mamy przemieszczającą się cząstkę i pole magnetyczne. Te dwa elementy wspólnie powodują, że na elektrony działa siła Lorentza, której zwrot jest prostopadły do wału wirnika i znajduje się poza jego osią. To wprawia całość w ruch obrotowy. Podczas niego rdzeń i uzwojenie, przez które płynął prąd, zmienia ustawienie w stosunku do magnesów, co powoduje także zmianę kierunku działania siły Lorentza. Przestaje ona obracać wirnik i cały wał. Żeby zapobiec zatrzymaniu pracy silnika, należy w pewnym momencie powstrzymać przepływ prądu przez dane uzwojenie na rzecz tego, które znajduje się teraz w punkcie, od którego zaczynało poprzednie. Stanie się to w momencie kiedy szczotki miną jedną z sekcji komutatora i po przejściu przez przekładkę trafią na kolejną, która jest połączona z następnym uzwojeniem. Komutator gwarantuje nam mechaniczne przełączanie przepływu prądu, a szczotki zapewniają różnicę potencjałów (napięcie) potrzebną do jego zaistnienia.
Im większe napięcie przyłożymy w (1), tym większy prąd (większa ilość ładunków) płynie przez komutator i uzwojenie, co zwiększa siłę, jaka działa na wirnik. To z kolei prowadzi do jego rozpędzenia. Po to właśnie potrzebny jest tranzystor przed końcówkami "+" i "-" na kontrolerze lotu quadrocoptera - steruje on ilością prądu dostarczanego do silnika, tym samym kontrolując jego obroty. Dodając gazu na aparaturze, informujemy kontroler lotu, że należy wysterować tranzystor wyższym napięciem, co otworzy drogę do wyższego przepływu prądu przez silnik zwiększając jego prędkość pracy i przyspieszając tym samym obroty śmigieł.
Silnik bezrdzeniowy (Brushed coreless motor)

[Źródło: http://www.citizen-micro.com/tec/items/images/cm1.jpg]
Ten typ silnika robi najwięcej zamętu, ale też zdobywa coraz większą popularność. Jak widać po zdjęciu, jego budowa jest trochę inna, ale wbrew pozorom zasada działania - identyczna. Rzecz w tym, że na wale wirnika znajduje się tylko cieniutki walec z nawiniętym uzwojeniem. Taka budowa zmniejsza masę samego wirnika, a tym samym także jego bezwładność.
Silnik bezrdzeniowy nadal więc jest silnikiem szczotkowym, ponieważ... posiada szczotki. Jak widzicie na obrazku, zarówno one (3), jak i komutator (4) są tam gdzie były. Magnesy (8) z kolei zostały przeniesione do wewnętrznej części korpusu silnika. Po ich zewnętrznej stronie kręci się nawinięte uzwojenie (5). Ponadto części pozostały bez zmian.
Silniki bezszczotkowe (Brushless motor)

Silniki szczotkowe obecne w tak wielu quadrocopterach są obecnie bardzo tanie, co skutkuje także bardzo przyzwoitą ceną modeli. Niestety, jak to już bywa w życiu, co jest tanie nieczęsto jest też dobre. Szczotki w silnikach zużywają się dość szybko, ponieważ podczas pracy wciąż trą o komutator. Prowadzi to również do dodatkowej straty energii.
Rozwiązaniem jest wyeliminowanie komutatora mechanicznego na rzecz takiego, który mógłby być sterowany elektronicznie. Stało się to możliwe wraz z miniaturyzacją układów cyfrowych i ich coraz wyższymi częstotliwościami pracy. W silniku bezszczotkowym "komutator" został przeniesiony poza sam silnik, a cały układ nazywa się ESC (Electronic Speed Controller), co u nas jest nazywane Elektronicznym Regulatorem Obrotów. Modelarze mówią na nie regle, więc zapamiętajcie tę nazwę. O samych ESC będę pisał, gdy uruchomię dział DIY (Do It Yourself), w którym będę omawiał temat składania i uruchamiania własnego quadrocoptera. Póki co, wystarczy nam wiedzieć, że regulatory dostają sygnał od kontrolera lotu na podstawie którego ustalają konkretne tempo obrotów silnika bezszczotkowego.

ESC - po lewej stronie przewody (czerwony, czarny) zasilające regulator i podające prąd na silnik, podłączone bezpośrednio do baterii. Potrójny przewód to wyjście 5V dla kontrolera lotu (czerwony i czarny), natomiast pomarańczowym przyjmowany jest sygnał sterujący. 3 niebieskie przewody po prawej podłączamy do silnika bezszczotkowego.
Zajrzymy teraz w głąb takiego silnika i przekonamy się, że jego budowa nie różni się wiele od tego, co poznaliśmy wcześniej. Najbardziej popularne rozwiązanie w kopterach to silnik outrunner, czyli taki, w którym ruchoma jest zewnętrzna jego część (korpus), a wnętrze jest przykręcone do ramy. Zauważcie, że jest to dokładnie odwrotna zasada działania, w porównaniu do silnika szczotkowego. Do nieruchomej części prowadzą 3 przewody, które następnie są połączone z uzwojeniami nawiniętymi na poszczególne rdzenie. Z kolei korpus ma przyklejone magnesy, jeden obok drugiego, na całym obwodzie.

Źródło: Kanał "Learn Engineering" - "Brushless DC Motor, how it works ?"
Tutaj reguła działania jest nieco inna. Przepływ prądu przez uzwojenie powoduje powstanie pola magnetycznego. Próbujemy doprowadzić do sytuacji, w której jedno z uzwojeń ma przeciwny biegun i przyciąga magnes na korpusie, a drugie jednocześnie go odpycha. To wywoła ruch obrotowy. Gdy magnes znajdzie się nad kolejnym uzwojeniem, należy błyskawicznie przełączyć przepływ prądu, tak aby powtórzyć cały proces. Ciągłe odpychanie przez jedne uzwojenia, a przyciąganie przez drugie pozwoli utrzymać obracanie się silnika. W analogiczny sposób możemy też go przyhamować.
Jak łatwo zauważyć jest to efektywne, ale i droższe oraz trudniejsze w realizacji. Tutaj nie wystarczy samo przyłożenie napięcia i przepływ stałego prądu. Potrzebujemy inteligentnego układu, który "dogada" się z z silnikiem. Obecność ESC podbija z kolei cenę całości i wymaga sterowania przez kontroler lotu.

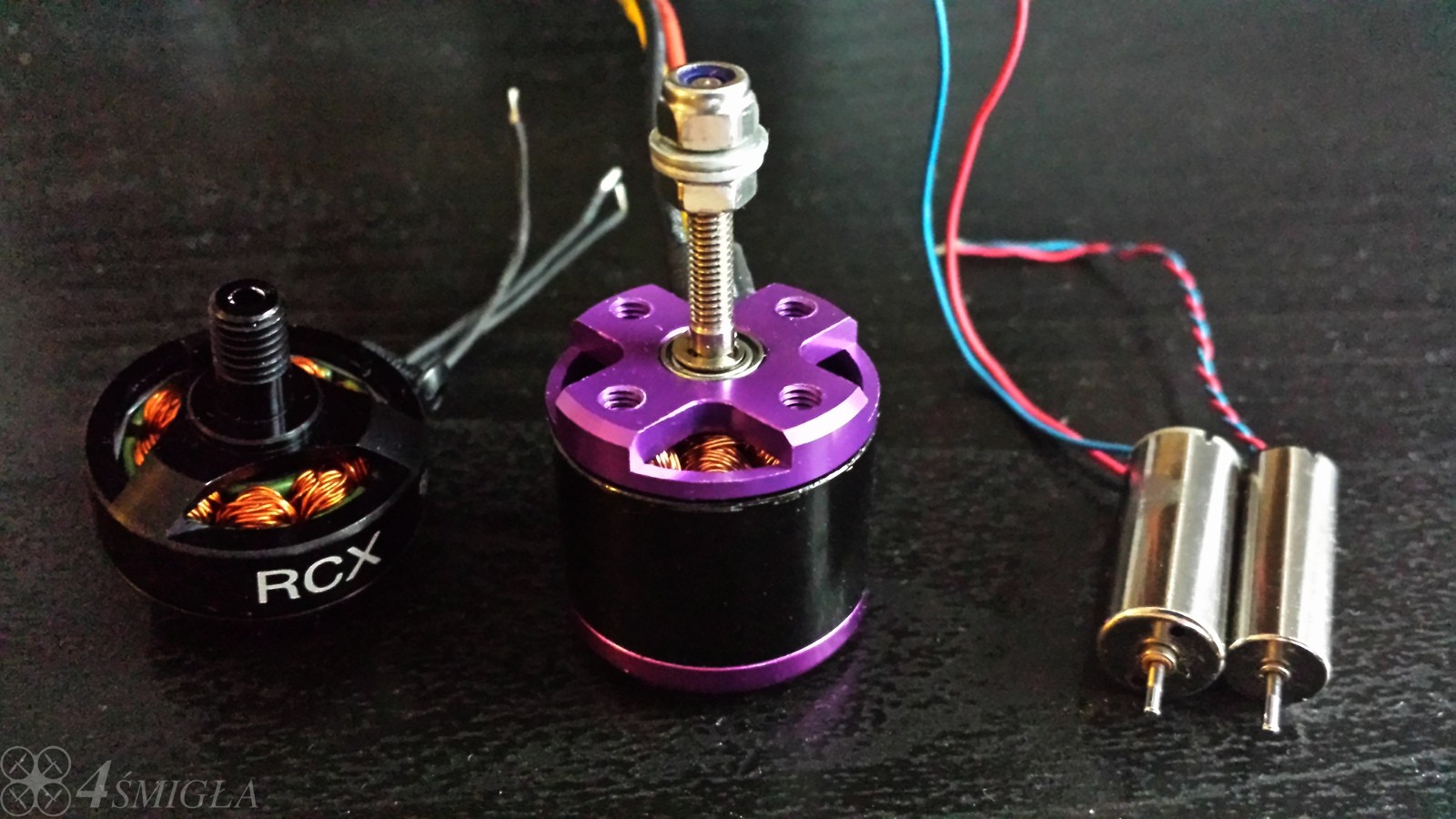
Niewątpliwą zaletą silnika bezszczotkowego jest jego stosunek masy do mocy, która jest nieprzystająca w stosunku do wersji szczotkowej. Urządzenia, które widzicie na zdjęciach pobierają szczytowo prąd o natężeniu nawet 11A przy napięciu 11.1V (3S), co daje ponad 100W mocy. Na odpowiednio dużych śmigłach są w stanie wytworzyć ciąg sięgający 400g, co oznacza, że masa startowa modelu może wynosić do 800g (4 silniki x 400g ciągu / 2). Jak na takim napędzie latałaby Syma X5C - strach pomyśleć ! :)
Podsumowanie
Postarałem się przybliżyć Wam działanie poszczególnych typów silników i raz na zawsze zamknąć temat: "bezrdzeniowe" (coreless) kontra "bezszczotkowe" (brushless). Mam nadzieję, że wyjaśnienie było na tyle jasne, że żadne z Was już nie da się nabrać na promocję na "bezszczotkowy" quadrocopter !
Udanych lotów !
Coś więcej ?
Znalazłem link, który bardziej dogłębnie (a może i lepiej) wyjaśnia działanie poszczególnych typów silników. Mam nadzieję, że mój artykuł jest wolny od merytorycznych błędów, gdyż dokładałem wszelkich starań, aby tak właśnie było. Gdybyście coś znaleźli - dajcie znać w komentarzu - chętnie się poprawię.
http://forbot.pl/blog/artykuly/mechanika/silniki-elektryczne-szczotkowe-bezszczotkowe-krokowe-id2802
{kind=link}