Prawie każdy nadajnik wideo, który można dziś kupić, ma przynajmniej jeden przycisk, który pozwala na zmianę kanału i pasma, na którym przesyła sygnał. Konfiguracja ta bywa uciążliwa, szczególnie, gdy kopter jest mocno zabudowany i dostęp do przycisku jest trudny i wymaga np. małego śrubokręta. Dużo łatwiej byłoby, gdyby zmiana ustawień nadajnika (mocy, kanału) mogła być przeprowadzona z poziomu aparatury lub samych gogli i OSD. Do tego właśnie używamy Smartaudio. Czym jest, jakie daje możliwości i jak je skonfigurować? Tutaj się tego dowiesz!
Już pewien czas temu dwóch znanych producentów sprzętu FPV opracowało standard komunikacji pomiędzy kontrolerem lotu (FC), a nadajnikiem FPV (VTX). Te dwie firmy to TBS (Team Blacksheep), które wypuściło standard "TBS SmartAudio", oraz ImmersionRC, które to z kolei roboczo nazywane jest "IRC Tramp" - przynajmniej w BetaFlight. Powszechnie przyjęła się nazwa "Smartaudio", która oznacza, że dany nadajnik ma możliwość zdalnej zmiany ustawień. To, który standard wspiera, pojawia się już w opisie, albo dokumentacji danego produktu.
Tutaj nie ma jednoznacznego rozgraniczenia, który standard wykorzystuje nasz nadajnik. Generalnie nadajniki od TBS - seria Unify wprowadziły i wykorzystują "TBS SmartAudio". Także AKK i część Eachine również wspiera ten standard. Należy pamiętać, że nie każdy nadajnik w pełni implementuje tą specyfikację, co oznacza, że tani Eachine może mieć "Smartaudio", ale niekoniecznie będzie ono działało prawidłowo.
Z kolei "IRC Tramp" to domena nadajników od ImmersionRC - w szczególności popularnego Trampa. Również FuriousFPV wspiera ten standard.
Nadajnik FPV ze SmartAudio nasłuchuje na dane odnośnie zmiany kanału, pasma, albo mocy. Potrafi też na daną ramkę odpowiedzieć. Wszystko odbywa się na jednym przewodzie. Do SmartAudio wykorzystujemy pin TX wybranego UART na kontrolerze lotu, łącząc go z RX po drugiej stronie. Prawda jest taka, że producent opisze ten pin np. jako SA (skrót od SmartAudio), a w każdym razie da nam w instrukcji lub specyfikacji do zrozumienia, że to tam ma wejść sygnał sterujący. Kwestia wejścia sygnału jest nieprzypadkowa. Niektóre nadajniki FPV mają wejścia na mikrofon, czyli tam spodziewają się otrzymać sygnał z mikrofonu. SmartAudio jest wyłącznie rozszerzeniem, które zostało nazwane Smart z uwagi na to, że na pinie na którym pojawiał się sygnał mikrofonowy, przy okazji dało się przenosić dodatkowe dane. W przypadku np. TBS Unify Pro jednoczesne podłączenie mikrofonu i SmartAudio do jednego pinu wymagało nieco więcej zachodu, ale tak oryginalnie zrodziła się ta opcja. Potem, gdy okazało się, że mikrofony nie są zbyt często w praktyce wykorzystywane, producenci po prostu zostawili pin jako SmartAudio, ponieważ ten akurat zyskiwał na popularności.
Aby SmartAudio działało, po stronie BetaFlight musimy ustawić dany UART. Wchodzimy w zakładkę Ports, a przy wybranym UART rowijamy menu w kolumnie "Peripherals". Możemy wybrać "TBS SmartAudio" albo "IRC Tramp".
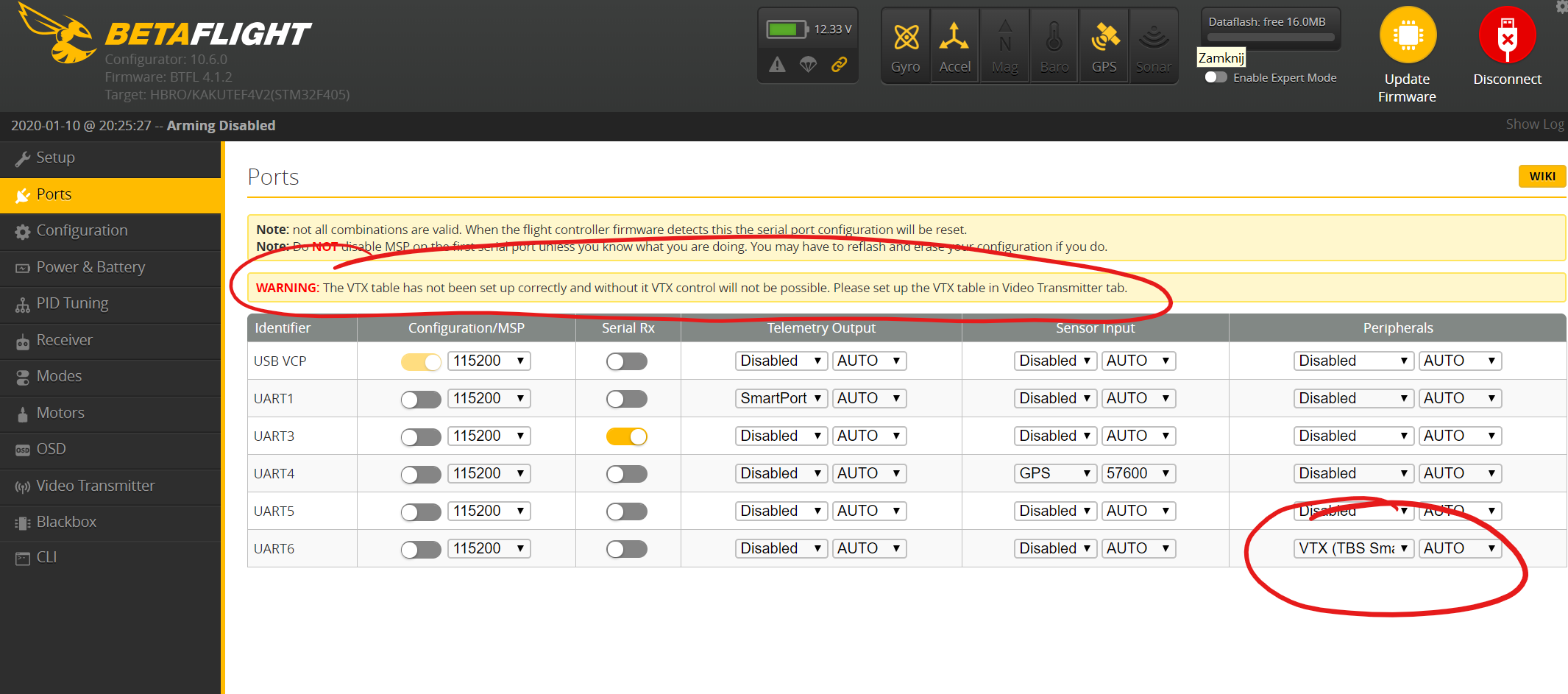
Z uwagi na to, że FuriousFPV Stealth wspiera ten drugi to w moim przypadku była to opcja VTX (IRC Tramp). Komunikat, który wyświetla się u góry mówi o tym, że skonfigurowaliśmy SmartAudio, ale nie mamy ustawionych tabel częstotliwości i kanałów. W najnowszych wersjach BetaFlight musimy ręcznie wprowadzić konfigurację, którą będzie się kierować kontroler lotu. Musimy poustawiać moce, częstotliwości itd. Na szczęście na stronie BetaFlight można znaleźć gotowe konfiguracje. Na razie przejdźmy jednak do zakładki "Video Transmitter".
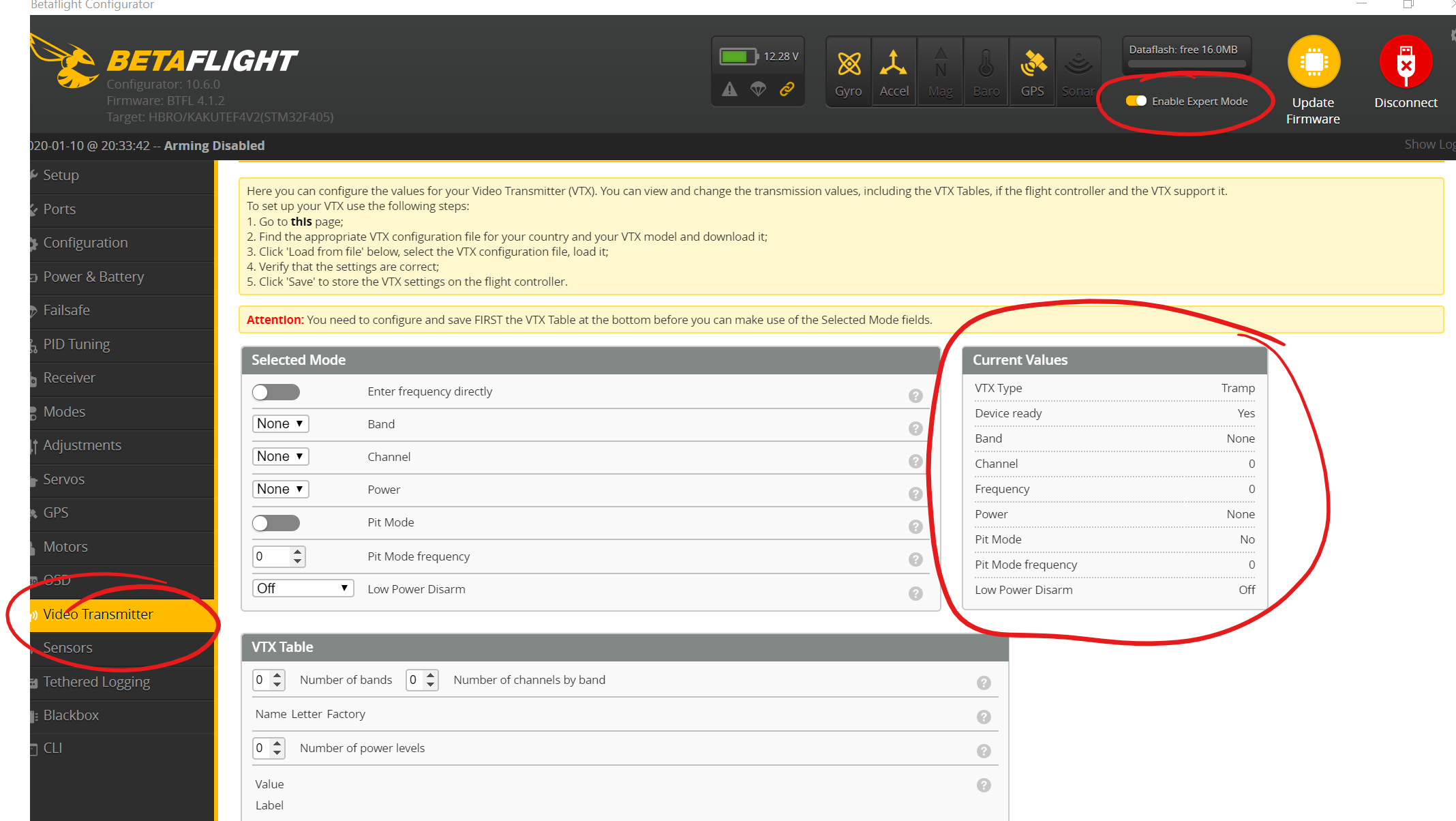
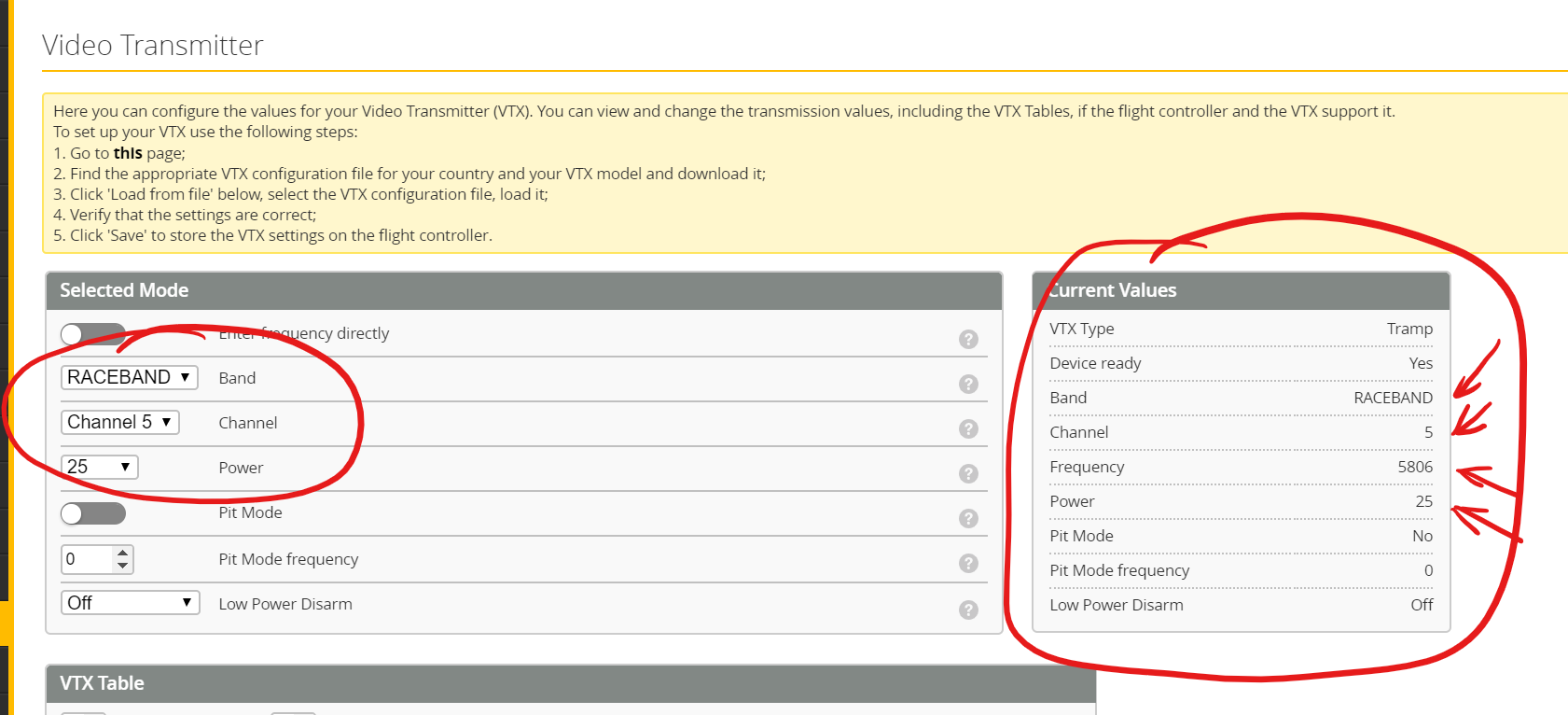
W zakładce zwróćmy przede wszystkim uwagę na tabelę prawej stronie. Pokazuje ona bieżące ustawienia nadajnika FPV. "VTX Type" mówi nam, jaki typ protokołu mamy skonfigurowany, co wynika z poprzedniej zakładki, czyli "Ports". Ważniejsze jest drugie pole - "Device ready". Jeśli nadajnik komunikuje się prawidłowo z kontrolerem lotu, to zobaczymy tam "Yes". Pamiętajmy, że aby tak się stało, musimy podłączyć pakiet Li-Po do koptera. W innym razie nadajnik nie będzie zasilany i trudno, żeby działał :)
Teraz pora na skonfigurowanie tabel dla danego nadajnika. Do wersji BetaFlight 4.0 nie musieliśmy nic specjalnego ustawiać, natomiast od 4.1 musimy poustawiać kanały, moce, częstotliwości itd. Gdyby tylko ktoś już zrobił to za nas...
Z pomocą przychodzi strona BetaFlight: https://github.com/betaflight/betaflight/wiki/VTX-tables .
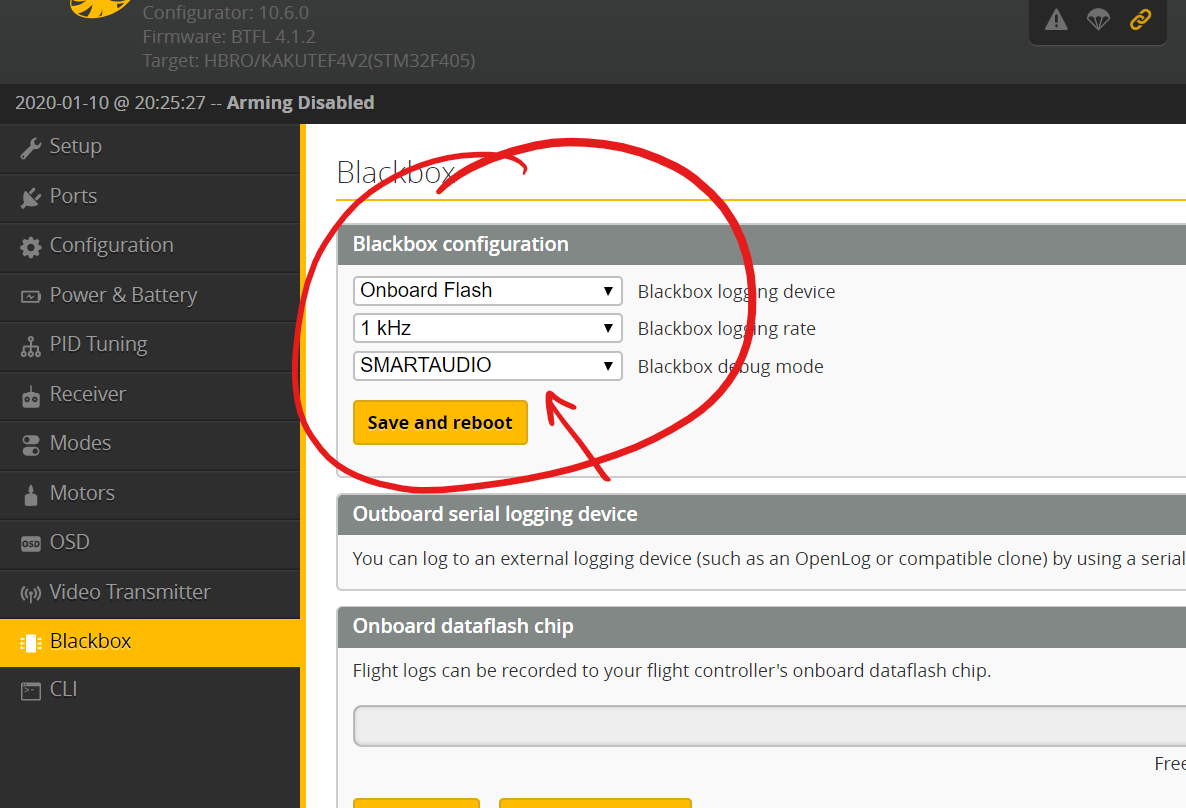
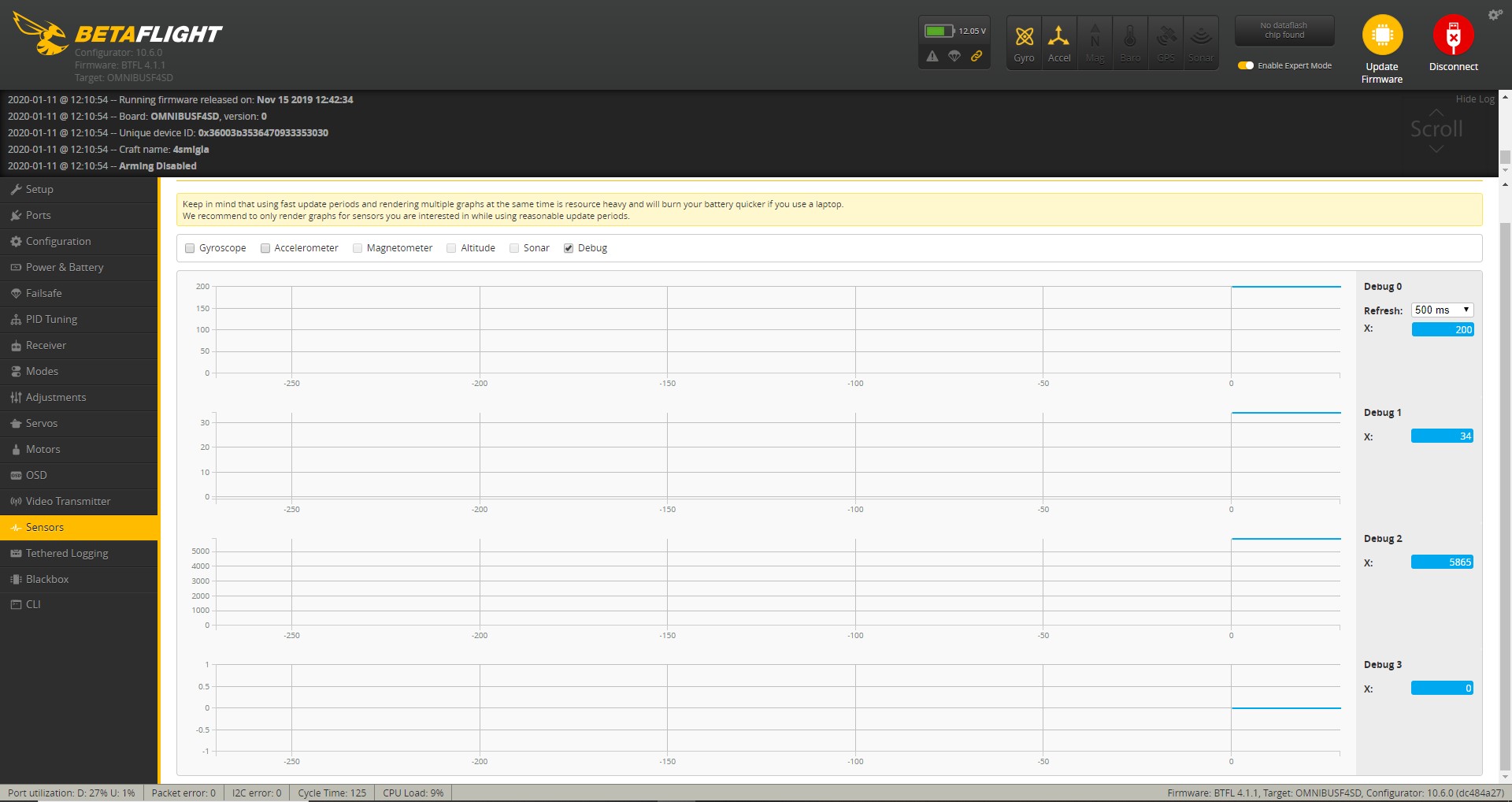
Dla danego typu protokołu musimy pobrać odpowiednią tabelę. O ile w przypadku IRC Tramp jest nieco łatwiej, o tyle SmartAudio się komplikuje, z uwagi na 3 wersje: 1.0, 2.0, 2.1. Ustalenie, którą mamy, nie jest na szczęście tak trudne, jak mogłoby się wydawać. W tym celu wejdźmy w zakładkę "Blackbox" w BetaFlight. W niej ustawmy "Blackbox debug mode" na "SMARTAUDIO", a następnie zapiszmy ustawienie poprzez "Save and reboot".
Teraz przechodząc do zakładki "Sensors" (tak - musimy wpierw zaznaczyć "Enable Expert Mode" w prawym górnym rogu okna BetaFlight) zaznaczmy pole "Debug" i po podłączeniu zasilania do koptera, spójrzmy na wykresy i wartości przy nich. Pierwszy definiuje wersję SmartAudio. Wartość 100 i 116 to SmartAudio 1.0; 200 i 216 - SmartAudio 2.0; 300 i 316 - SmartAudio 2.1. Wartości z "16" na końcu oznaczają odblokowany nadajnik FPV. W przypadku TBS Unify oznacza to dostęp do maksymalnej mocy (200mW w wersji Race i 800 mW w wersji Pro) oraz możliwości wybrania wszystkich kanałów.
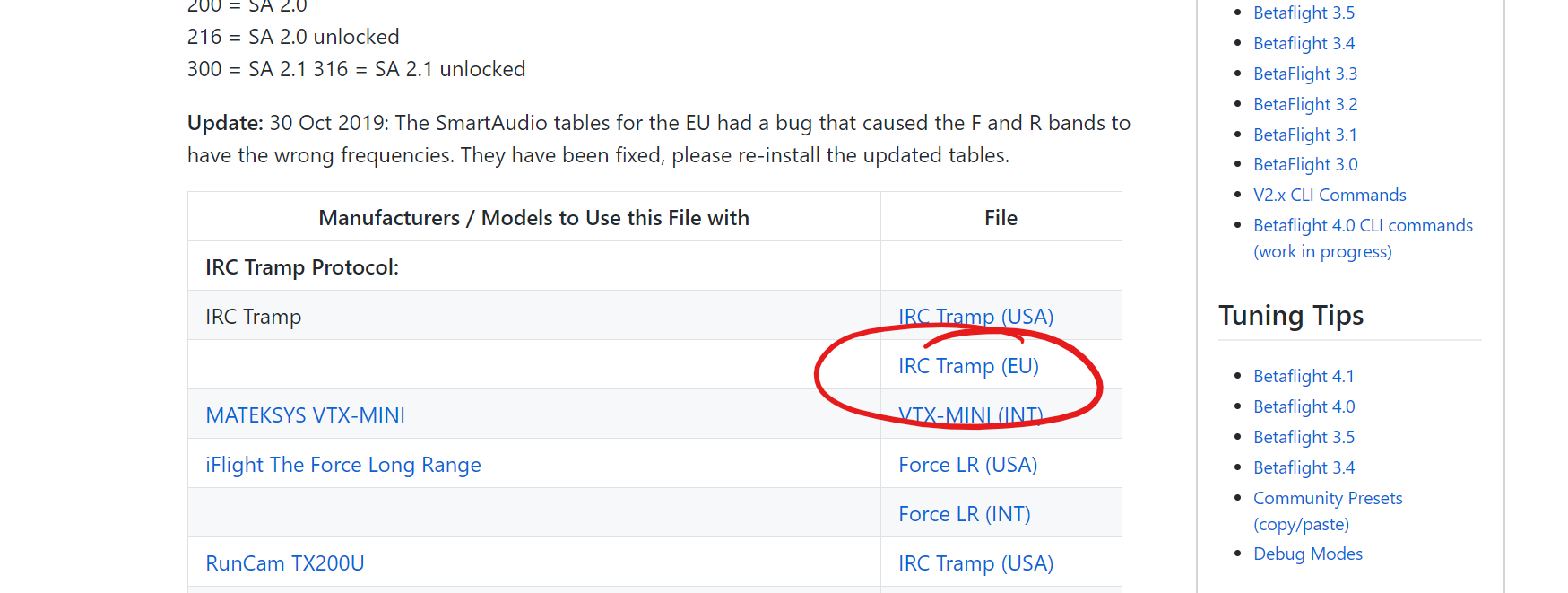
Tyle wiedzy na razie nam wystarczy. Teraz trzeba pobrać odpowiedni plik. Ja akurat korzystam z IRC Tramp, więc wybieram ten, ale jeśli macie inny nadajnik to myślę, że łatwo go znajdziecie. Mamy dostępne warianty EU i USA, a czasem INT. Nas w Europie interesuje wariant EU (standaryzacja ETSI) lub INT, który oznacza International (międzynarodowe). USA na ogół wiąże się ze standardami określanymi przez tamtejszą Federalną Komisję Łączności (FCC). W Europie mamy obecnie obciętą część kanałów, ale jeśli chcemy być zgodni z lokalnymi przepisami, wybieramy wariant EU. Pamiętajmy, że w tym wariancie RaceBand jest przycięty do 4 kanałów. W FCC będziemy ich nadal mieli 8, czyli tak jak przywykliśmy mieć.
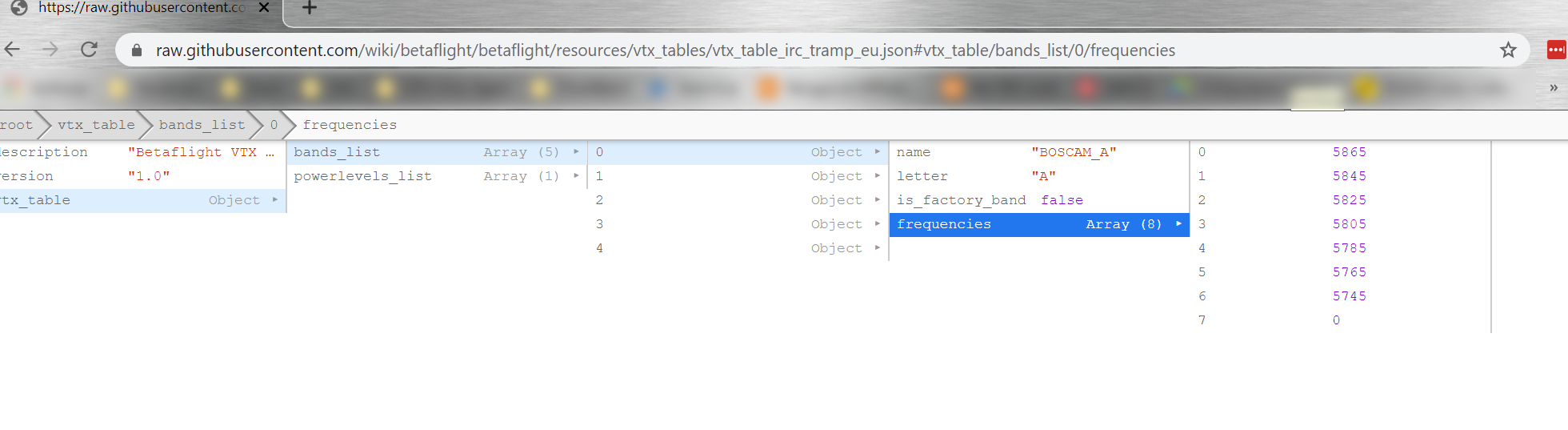
U mnie po kliknięciu wyświetla się podgląd pliku, co pewnie wynika z pluginu, który służy do podglądania plików JSON. Tym niemniej wystarczy kliknąć prawym klawiszem i wybrać opcję "Zapisz link jako..." i zapisać sobie konfigurację. Następnie wczytamy ją w BetaFlight.
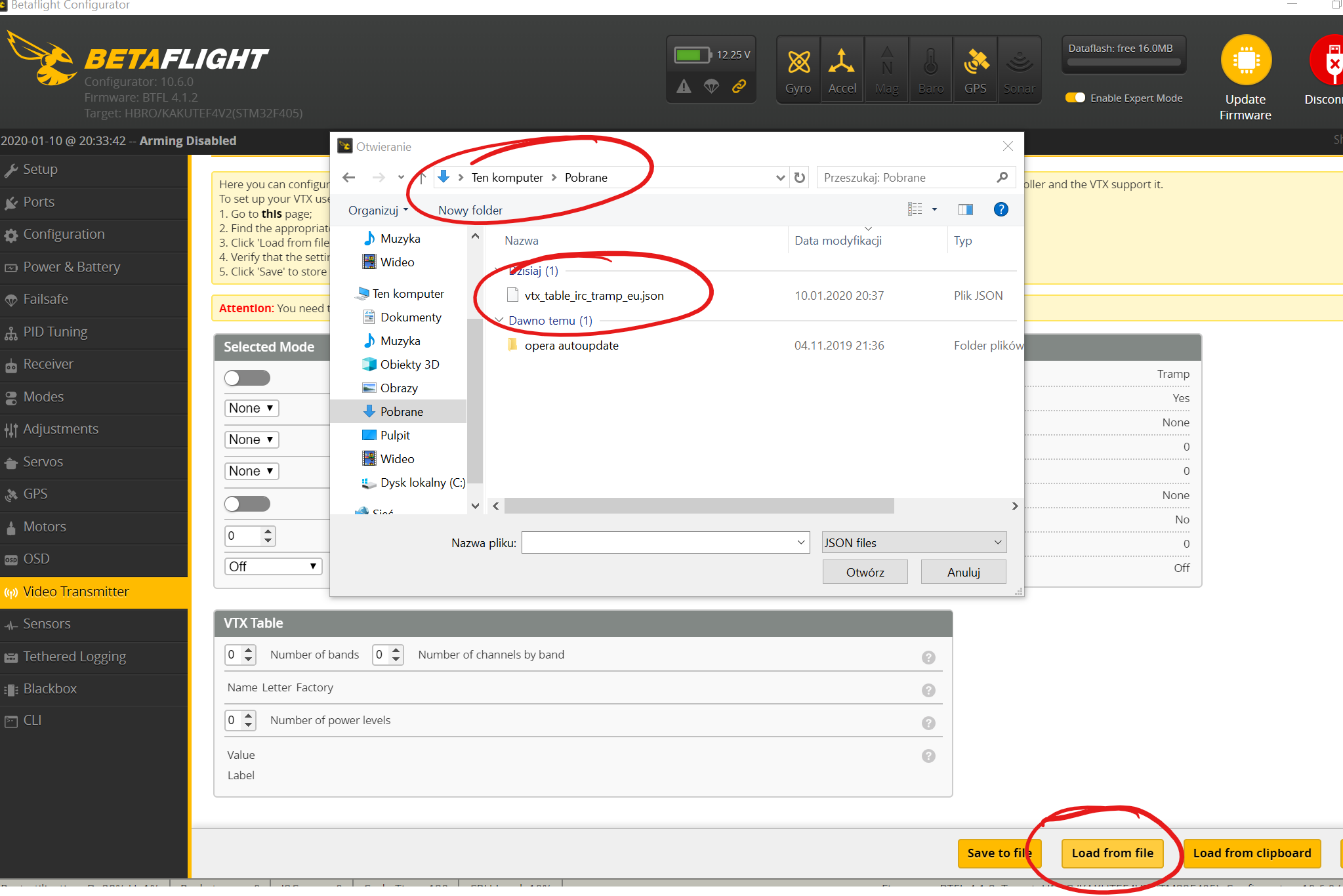
Wróciwszy do BetaFlight i zakładki "Video Transmitter" możemy odnaleźć pobrany plik i wczytać go przyciskiem w prawym dolnym rogu. "Load from file" otworzy nam typowe okno, w którym go wybierzemy.
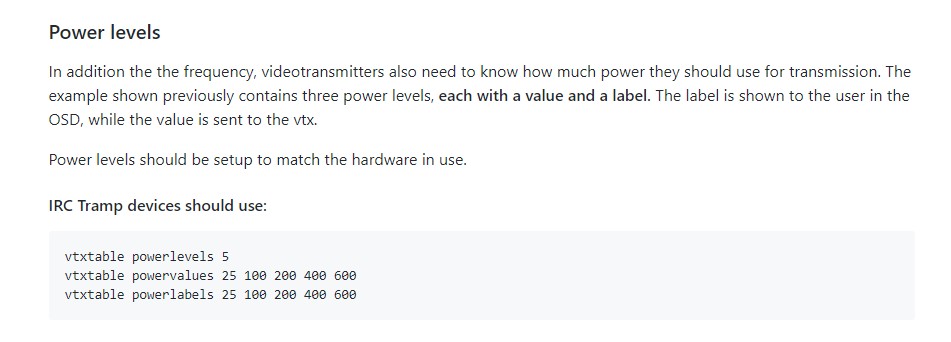
Dzięki temu, że pobraliśmy plik z dysku, nie musimy budować od zera tabeli z kanałami i częstotliwościami. W moim przypadku brakowało natomiast ustawień mocy. Jak się okazuje, protokoły bardzo różnią się wartościami, które należy do nich przesłać, aby ustawić tę właściwą. Zwróćmy uwagę, że pole "Value" to wartość, która jest przesyłana do nadajnika, zaś "Label" to napis, który pojawi się przy danym ustawieniu. Oznacza to, że np. dla urządzeń SmartAudio, wartość "2" oznacza tak naprawdę moc 500mW, czyli opatrzylibyśmy ją poprzez etykietę (Label) = 500. Rozpiska definiowanych mocy dla różnych nadajników znajduje się tutaj: https://github.com/betaflight/betaflight/blob/master/docs/VTX.md
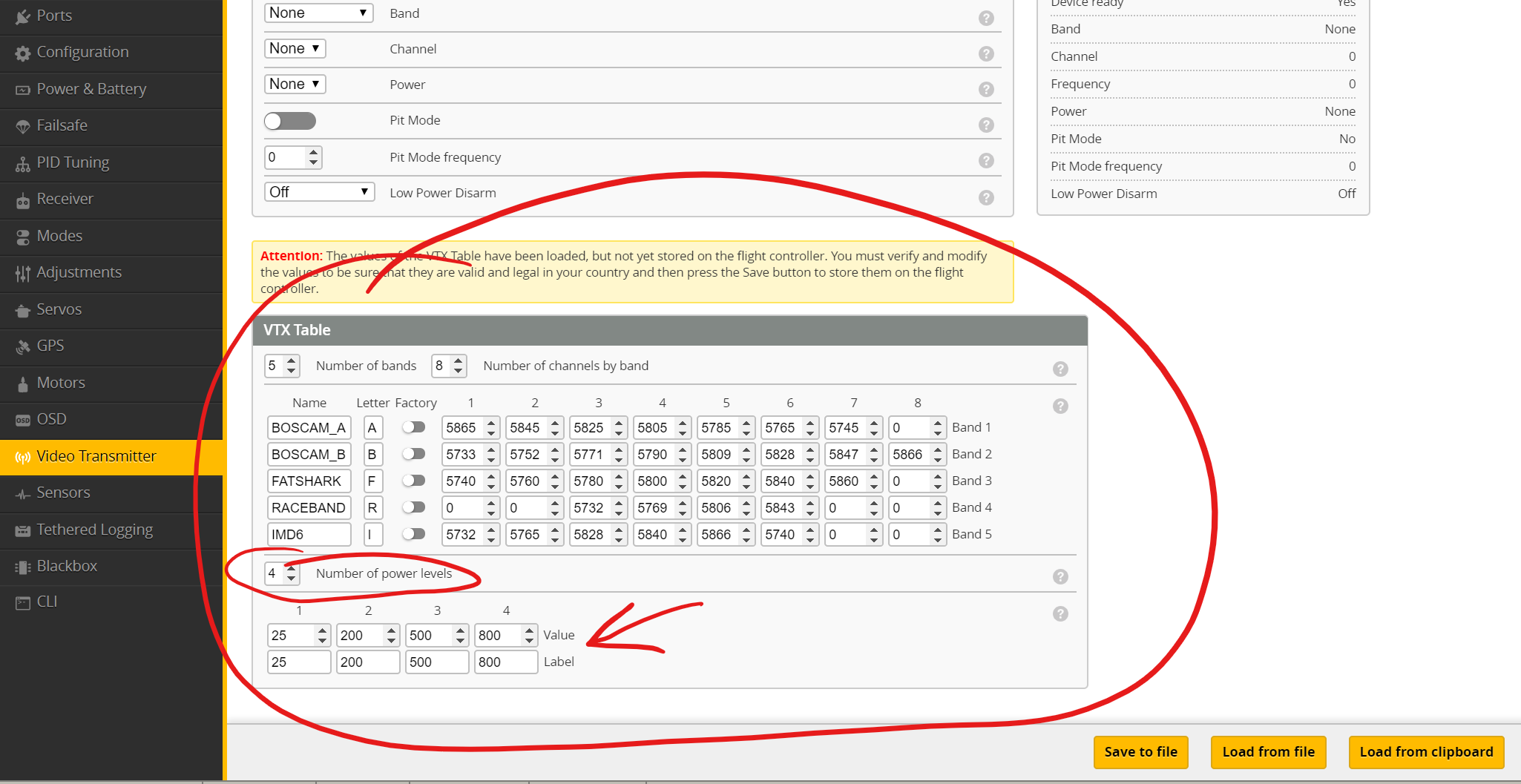
Wnikliwi zauważą, że ilustracja, którą przygotowałem też jest błędna, ponieważ dla FuriousFPV Stealth powinienem zastosować 5 poziomów mocy - odpowiednio: 25, 100, 200, 400, 600 z takimi samymi etykietami.
No dobrze, jak już ustawimy odpowiednie poziomy mocy, to pozostaje jeszcze wstępna konfiguracja nadajnika. Coś na początek. Ja latam na RaceBand, na ogół kanale 5. Chciałbym więc, aby kopter uruchamiał się z takim właśnie ustawieniem. Jeśli dopiero zaczynamy zabawę, polecam ustawić moc na 25mW, aby nadajnik nie grzał się, gdy my będziemy konfigurować i testować kopter. Jeśli idziecie prosto latać, od razu możecie ustawić np. 200mW, ale każde ustawienie można łatwo zmienić poprzez OSD i tak. Tym niemniej, aby zobaczyć, czy SmartAudio działa, możemy powybierać wstępnie opcje.
Warto jeszcze w tym miejscu wtrącić, że BetaFlight ma opcję: "vtx_low_power_disarm", którą możemy ustawić przez CLI (ostatnia zakładka w lewej kolumnie BetaFlight). Jeśli ustawimy tą opcję na "ON" to w momencie, gdy kopter będzie rozbrojony, nadajnik będzie pracował na najniższej możliwej mocy - na ogół w przedziale 0-25mW zależnie od jego typu. W momencie uzbrojenia, wskoczy na wartość, która została przez nas ustawiona w SmartAudio. Oznacza to, że mając nadajnik ustawiony np. na 800mW, będąc na ziemi będziemy mieli 25mW, a jak tylko uzbroimy kopter, kontroler lotu wyśle do nadajnika żądanie zmiany na 800mW. Wygodne, ale ma swoją wadę. Jeśli spadniecie gdzieś w krzaki i będziecie próbować namierzyć kopter po sile sygnału nadajnika FPV z użyciem kierunkowej anteny w goglach, bo np. buzzera nie słychać z uwagi na to, że kopter leży za daleko; to po rozbrojeniu wskoczy Wam z automatu 25 mW lub mniej, co bardzo utrudni szukanie sprzętu. Z drugiej strony nadajnik się nie ugotuje, więc coś za coś. Warto zauważyć, że na szczęście lepsze VTX mają zabezpieczenie termiczne i same redukują moc, gdy są za gorące.

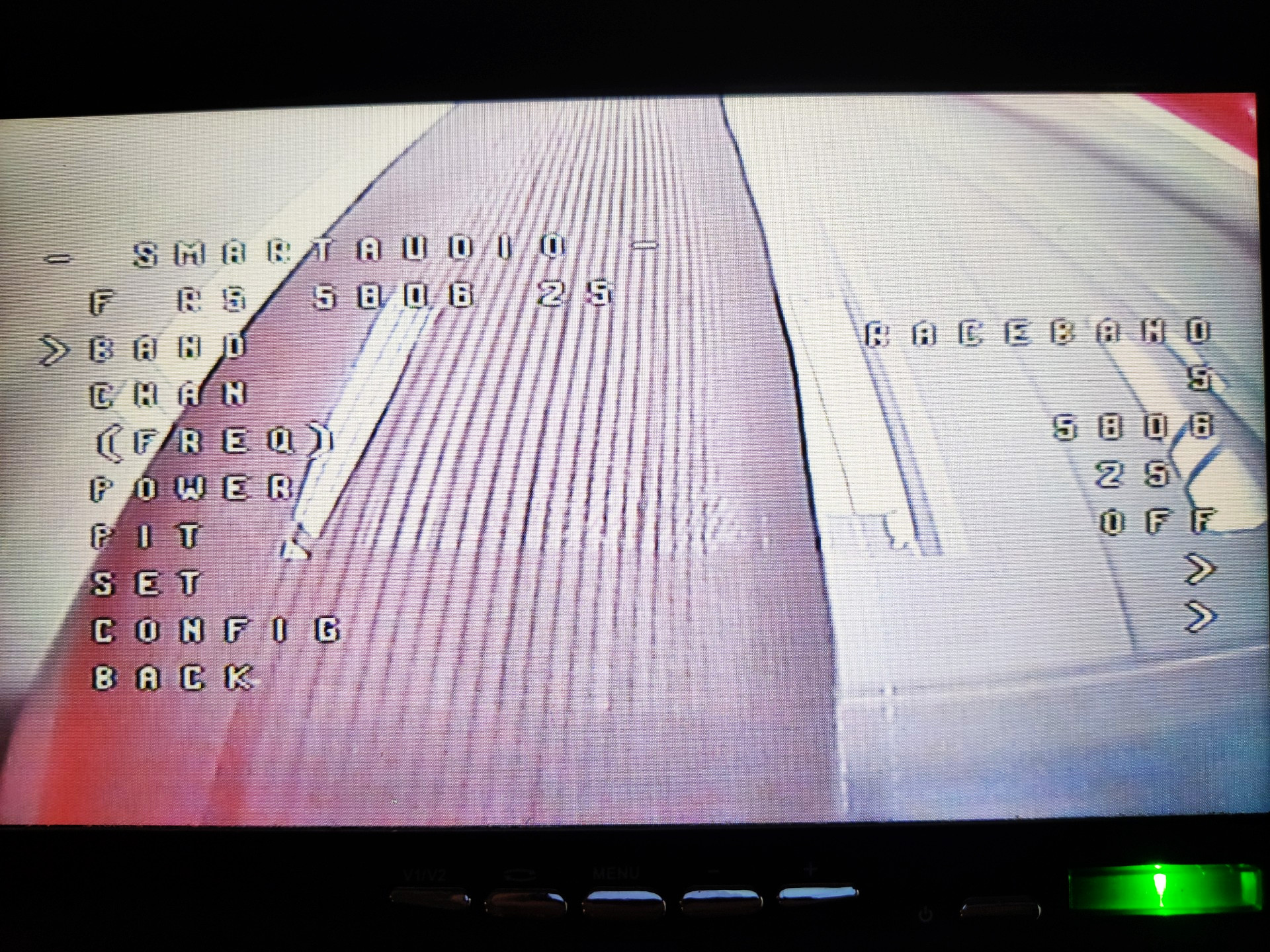
Po zapisaniu ustawień powinny nam one pokazać się w prawej tabeli. Jak już nastoimy gogle na właściwy kanał i zobaczymy, że obraz faktycznie się pokazał, możemy też zrobić prosty test i przez OSD zmienić dotychczasowy kanał. Po zapisaniu ustawień obraz powinien zniknąć z uwagi na to, że nadajnik zmienił aktualny kanał. Jeśli ponownie uda się nam go wyszukać, to znaczy, że SmartAudio działa. Możemy też przetestować, czy działa zmiana mocy i położyć kopter gdzieś w trawie, odejść i zobaczyć, czy jak już pojawią się zakłócenia - zmiana mocy faktycznie poprawi obraz. Pułapką SmartAudio może być to, że latając pomyślimy, że mamy ustawione 800mW, gdy tymczasem nadajnik cały czas będzie pracował na 25mW. Wystarczy tylko źle dobrać wartości mocy, co pokazywałem wyżej. Sprawdźmy więc wpierw, czy wszystko działa, nim wypuścimy kopter na kilometr i więcej.
Pozostaje już tylko zabrać kopter na zewnątrz i nie przejmować się więcej ręcznym ustawianiem kanałów.
Udanych lotów!
{kind=link}