
Niewiele kopterów cieszy się tak dużym zainteresowaniem, jak Mobula 7. Wynika to z jej ceny, ale również całkiem niezłych osiągów, wynikających z zastosowania pakietów 2S. Jeszcze do niedawna TinyWhoopy takie, jak Snapper 6/7 latały na bateriach o napięciu znamionowym 3.7V. Był to świetny sprzęt do rozbijania się po domu, ale na zewnątrz nadawał się jedynie do spokojnego latania. Dodatkowo, nie za duża moc wykluczała złożone ewolucje. Próbę zmiany tego trendu podjęto właśnie poprzez podniesienie napięcia zasilania i zmniejszenie liczby obrotów na wolt (KV) w silnikach. Mobula 7 jest modelem przejściowym, który próbuje połączyć latanie na 1S, bo takie też jest możliwe, z dodatkową możliwością uruchomienia go na 2S przy wykorzystaniu dwóch pakietów spiętych razem. Czy to się sprawdza? Zobaczmy!
W pudełku
Mobula 7 przychodzi do nas w kartonowym pudełku, które w środku zostało wyłożone rodzajem pianki, która sztywno trzyma wszystkie elementy. Najważniejszymi z nich są kopter oraz ładowarka.

Warto zauważyć, że model możemy kupić w dwóch wersjach. Według Banggood jest to Basic lub Standard version. Różni je wyłącznie ładowarka. W pierwszym wariancie otrzymamy proste urządzenie podłączane do portu USB, które pozwoli nam podłączyć pojedynczy pakiet. Z kolei w wersji Standard otrzymamy ładowarkę na 6 pakietów, z możliwością wyboru zarówno prądu, jak i końcowego napięcia. Wcześniej wspomniany wariant Basic pozwala na wybór tylko tego drugiego parametru, a więc tam również możemy określić, czy chcemy aby ładowarka skończyła na 4.2V, czy też ma "dociągnąć" do 4.35V.

Zestaw akcesoriów sam w sobie jest dość bogaty. W komplecie znajdziemy klucz do zdejmowania śmigieł, zapasowy ich komplet, śrubokręt, wtyczkę-zaślepkę, przekładkę z TPU, która trzyma obie baterie razem oraz 4 pakiety Li-Po, czyli w sumie 2 komplety do latania. Te ostatnie to kolejny, poza ładowarką, bonus od HappyModel, gdyż na ogół otrzymujemy jedną baterię. Tutaj możemy albo czterokrotnie polatać na 1S, albo odbyć dwa loty na 2S, więc zawsze to jeden zakup mniej na początek, bo dodatkowe pakiety to jedna z pierwszych rzeczy, jakie będziemy zamawiać.

Sama ładowarka pozwala na podłączenie do niej do 6 pakietów na raz. Zważywszy na to, że kopter potrzebuje do lotu na dobrą sprawę 2 sztuk na raz, możemy w ten sposób przygotować 3 zestawy baterii. Zwróćmy uwagę na to, że ładowarka przyjmuje zasilanie 7-24V albo z okrągłego złącza 5.5mm. Musimy więc miec albo pakiet Li-Po, który może zasilać ładowarkę, albo zasilacz, który będzie miał jedno z tych wyjść i zgadzał się napięciowo. Jeśli chodzi o regulację opcji ładowania, to możemy wybrać ładowanie pakietów LiHV (4.35V na celę) albo LiPo (4.2V) dla każdego z osobna. Druga sprawa to prąd ładowania. Mamy do wyboru typowe w tych ładowarkach 0.2A, albo 0.6A. Zważywszy na to, że pakiety od Mobuli mają 300mAh, czyli 0.3Ah, tak naprawdę powinniśmy wybierać raczej 0.2A, aby nie przekraczać prądu 1C (0.3A). Rozwiązanie z 0.6A doładuje pakiet szybciej, ale kosztem jest żywotność baterii. Dodatkowo, jeśli będziemy ją ładować do 4.35V, dodatkowo obniżymy jej trwałość.

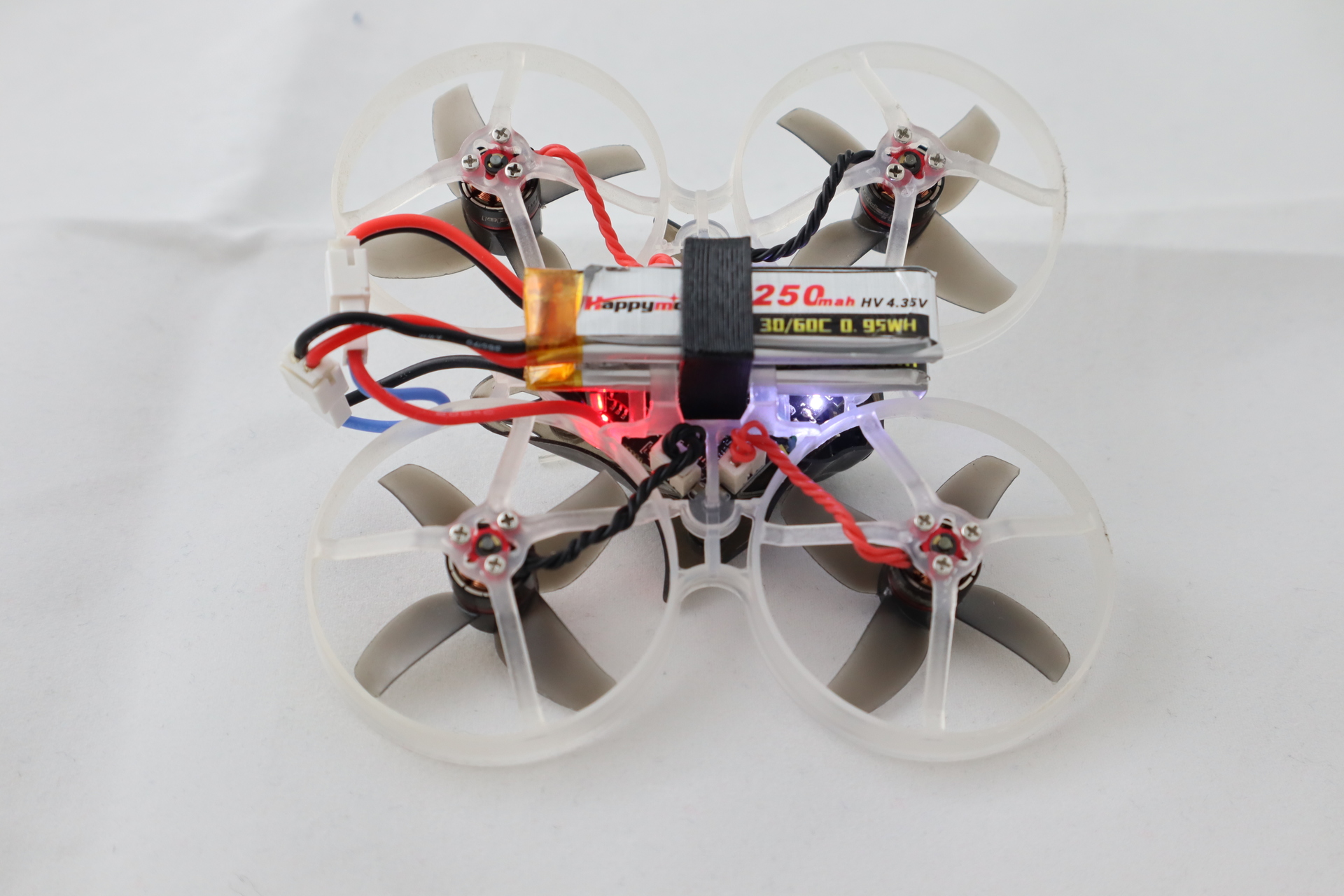
Wracając do baterii. Mobula 7 trafia do nas z 4 pakietami, z których każdy ma napięcie znamionowe 3.8V (czyli Li-Po HV), a więc pozwalają się ładować do 4.35V. Jak zawsze daje to nieco więcej mocy podczas lotu, ale też skraca żywotność pakietów. Nie musimy więc tego robić, chyba że uznamy, iż są one tak tanie, że nie warto je oszczędzać, co też jest uzasadnionym stwierdzeniem. Baterie mają pojemność 250mAh i zakończone są złączem JST PH 2.0, co na szczęście w bezszczotkowych Whoopach stało się standardem. Co prawda Mobula nie pogrzeszyłaby XT-30, ale o tym później.

Budowa
Mobula 7 ma całkiem zgrabny, opływowy kształt kadłuba. Rama to standardowe 75mm, czyli nieco tylko powiększony TinyWhoop (oryginalnie 65mm). Jasna rama kontrastuje z ciemnymi śmigłami i kadłubem, natomiast całość wygląda całkiem zgrabnie.

Kadłub zdaje się przypominać akryl - jest półprzeźroczysty i zupełnie gładki. Z początku obawiałem się nieco o jego trwałość, ale szybko wyszło na to, że jego samego trudniej jest połamać, niż na przykład bardzo lekki, ale też kruchy model od Bety 75X, którą recenzowałem pewien czas temu.

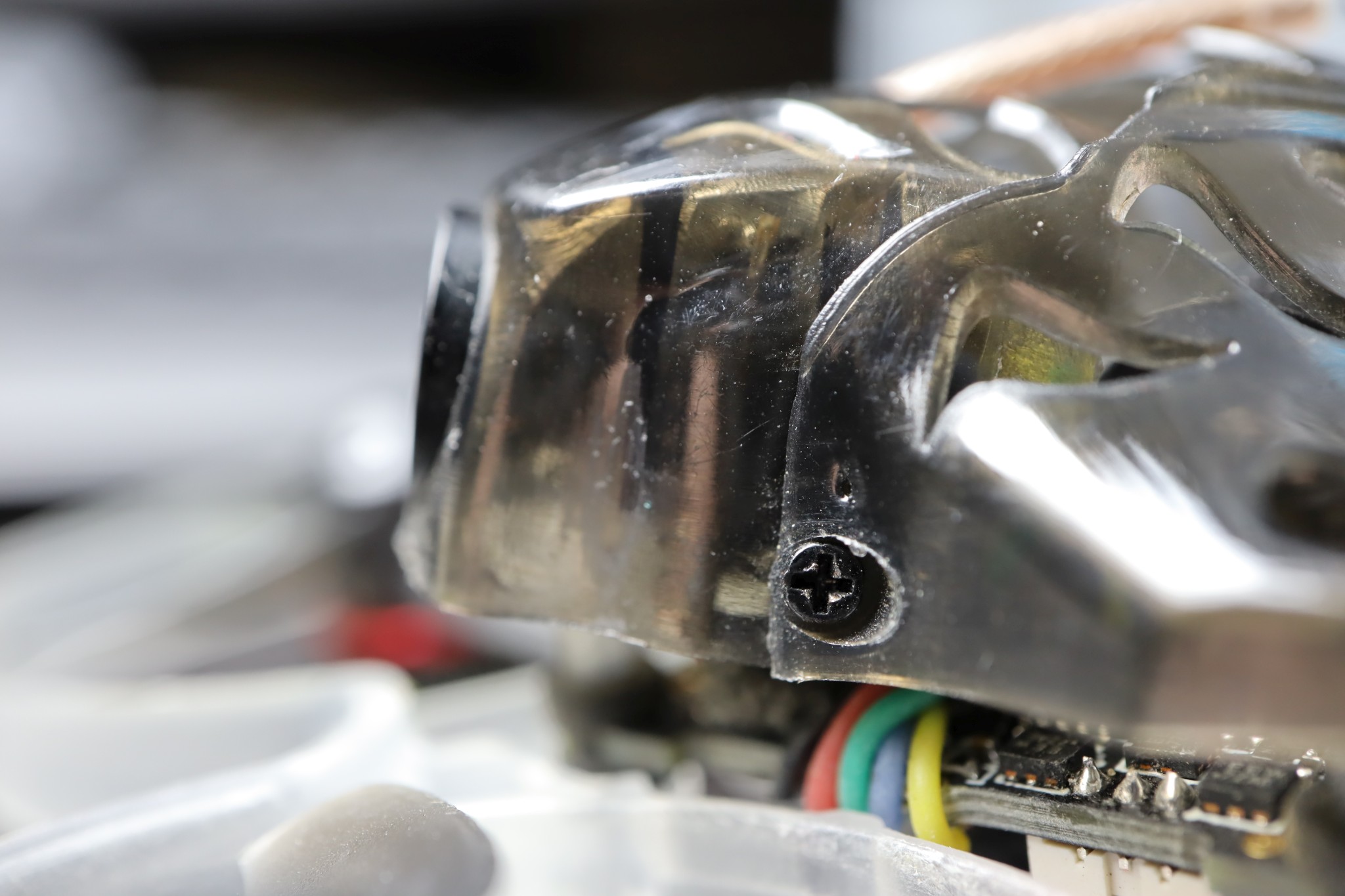
Sam kadłub musiał być też sztywny, ponieważ w nim osadzona została kamera z nadajnikiem. Z uwagi na to, że jest to łączone rozwiązanie (AiO), cała jego masa trzyma się na dwóch śrubkach, które mocują zewnętrzną obudowę do reszty kadłuba. Mamy jednak dzięki temu możliwość regulowania pochylenia obiektywu. Spokojnie możemy go ustawić poziomo w wersji dla zupełnie początkujących, by maksymalnie być w stanie go ustawić pod kątem około 25 stopni zważywszy na to, że nieco przeszkadzają przewody. Przy dużym uporze kamera pójdzie jeszcze dalej, ale nie wiem, czy śrubki będą w stanie utrzymać ją na stałe w takiej pozycji.

Silniki specjalnie nie urosły w stosunku do analogicznych modeli. Cały czas jest to rozmiar 0802 o KV wynoszącym 16000. Jest to kompromis pod kątem użycia pakietów 1S i 2S, chociaż czuć, że producent stawiał jednak na dwa pakiety. Latanie na 1S jak najbardziej jest wykonalne i nawet całkiem dynamiczne, porównywalne z TinyHawkiem, ale czuć wyraźnie, że jeśli nie skompensujemy mocno gazem ostrych zwrotów, to tracimy wysokość. Wychylenie lewego manipulatora maksymalnie w górę też pokazuje, że kopter nie ma zapasu mocy, aby dynamicznie zacząć się wznosić. Jest to więc opcja, ale wydaje mi się, że lepiej pozostać przy 2S i ograniczeniu nieco krzywej Throttle.
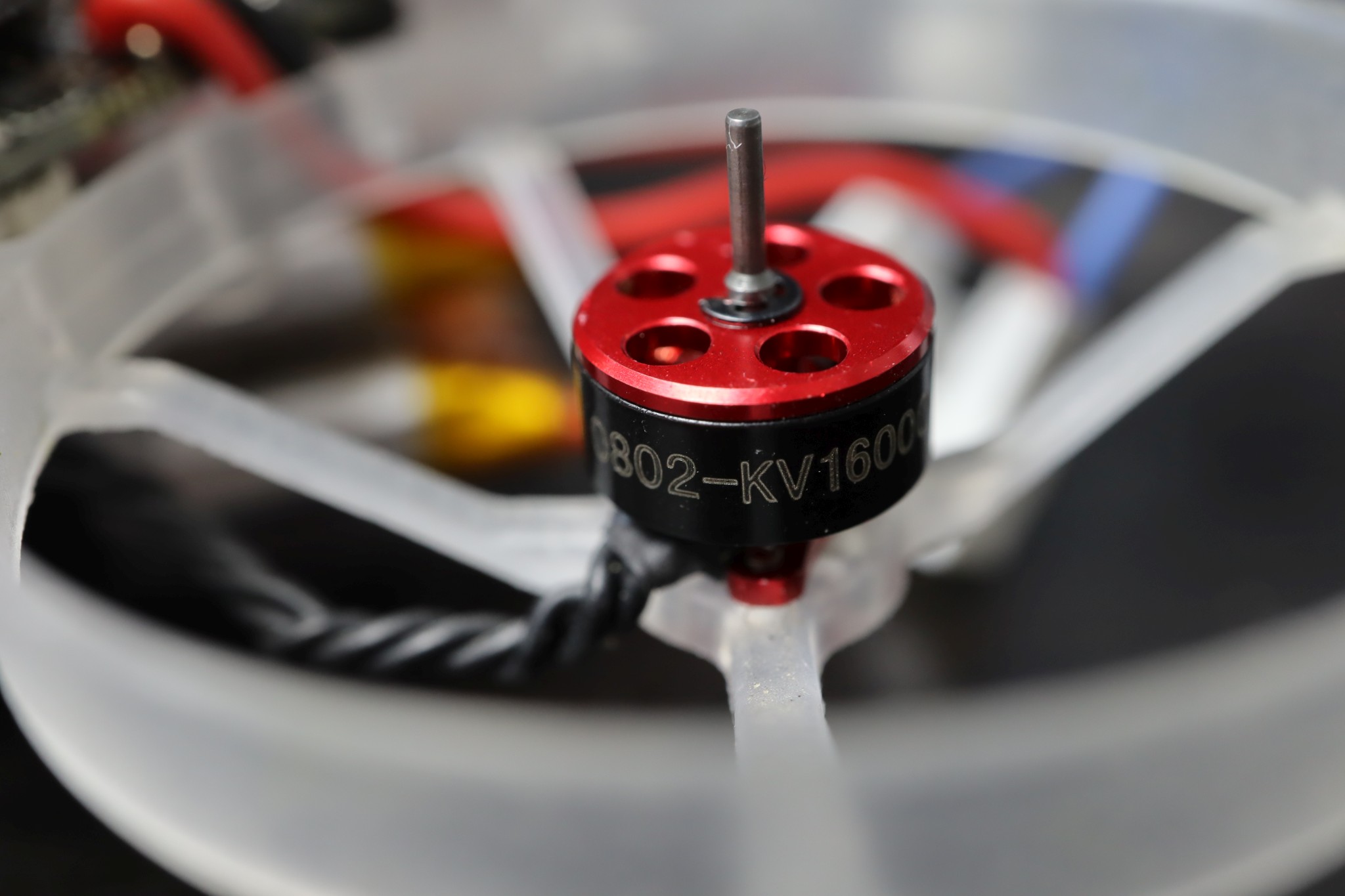
Silnik ma ośkę o średnicy 1mm. Tutaj uczulam, aby zwracać na to uwagę, bo np. śmigła od Bety 75X wyglądają identycznie, ale wewnętrzna średnica piasty to 1.25mm i nie będą tu pasowały. Tym niemniej śmigieł o otworze średnicy 1mm też jest sporo, więc nie powinniśmy mieć problemu z zapasami. Podobnie, jak i od dołu, wirnik silnika trzymany jest pierścieniem Segera.

Sam silnik został ma podstawę z otworami na 3 śruby. Jest to charakterystyczne dla silników w tym rozmiarze. W przypadku 110x nie ma już takiej regularności i np. Beta 75X ma 4 śruby. Ważne też jest to, że nie będziemy mieli problemu z wymianą ramy, ponieważ zarówno kontroler lotu, jak i same silniki są typowe.

Śmigła mają duże piasty, które pokrywają się średnicą z samym silnikiem. Ich demontaż może być nieco kłopotliwy, bo musimy zmieścić kluczyk do zdejmowania śmigieł pomiędzy piastę, a wierzch wirnika. Nie ma tam zbyt wiele miejsca, a dodatkowo przeszkadza nam zewnętrzna część ramy koptera, która nieco wystaje poza obrys samego śmigła.


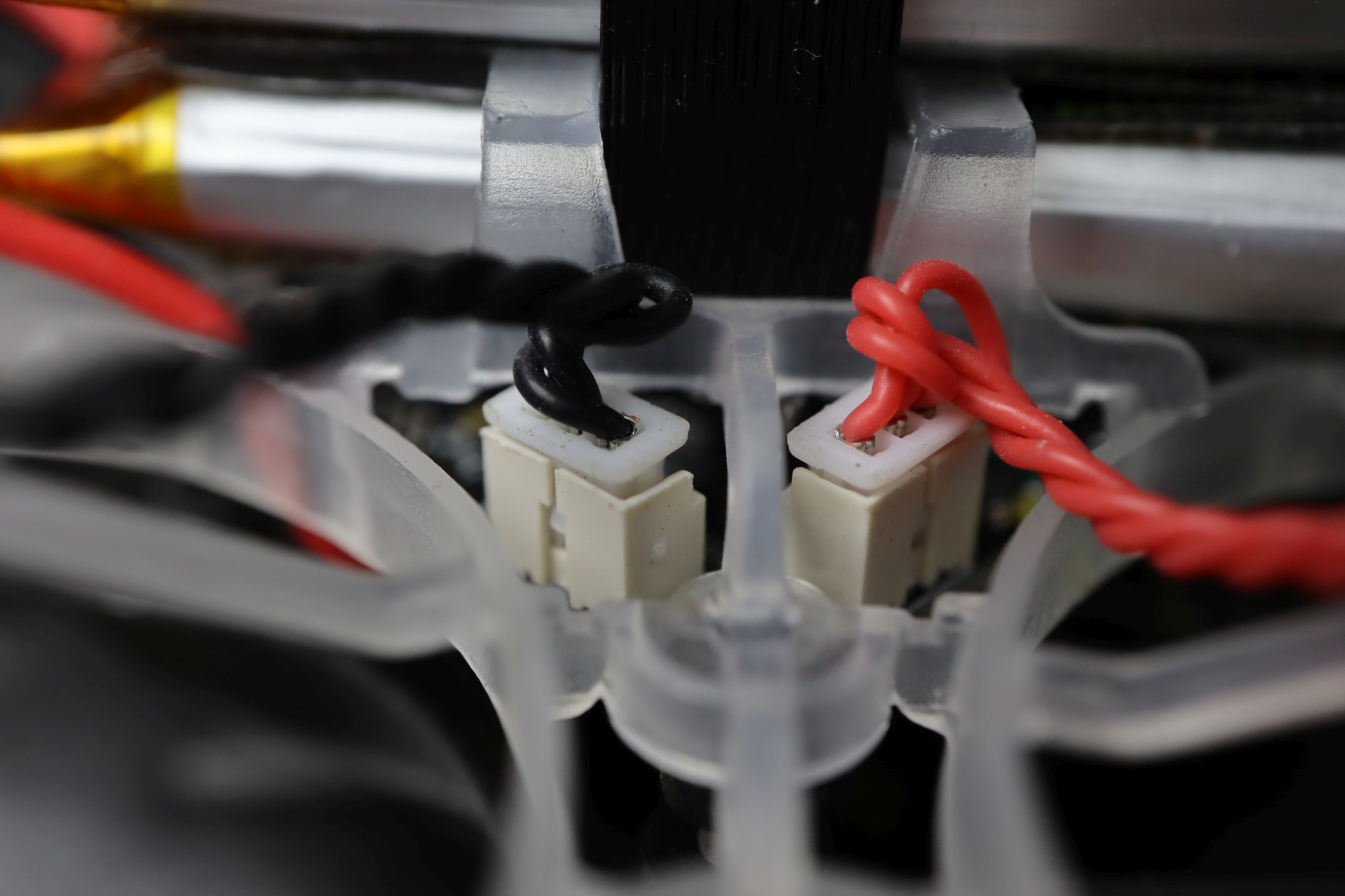
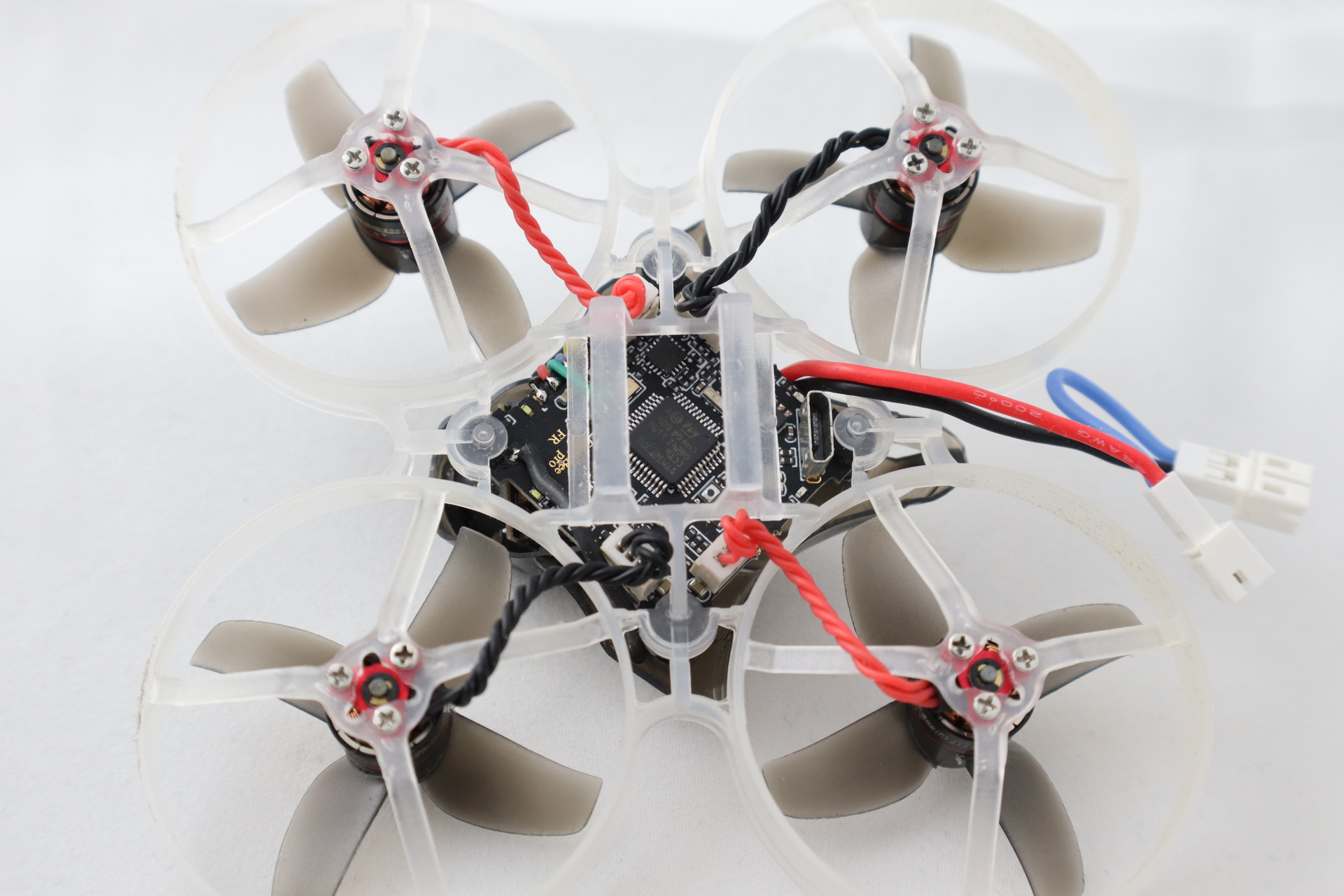
Silnik podłączamy jak zawsze - przewodem 3-pinowym, takim samym jak we wszystkich pozostałych bezszczotkowcach tego rozmiaru. Producent zastosował dwa kolory przewodów. Te same pojawiają się na skosie, co oznacza, że lewe i prawe silniki mają inny kolor kabelków. Zakładam, że może być tak, że kierunek obrotów nie został odwrócony bezpośrednio w ESC, a po prostu poprzez zamianękolejności przewodów we wtyczce. W częściach zapasowych na Banggood nie można wybrać koloru przewodów, mimo iż na zdjęciach pojawiają się oba, więc możliwe, że to tylko estetyczna kwestia. Tak, czy inaczej, wśród silników bezszczotkowych nie ma "lewych" i "prawych", więc i tak zamawiamy tylko jeden typ.
Mobula 7 ma od spodu 4 diody. Dwie z przodu są białe, zaś tylne - czerwone. Sygnalizują one, czy kopter jest połączony z aparaturą (świecą w sposób ciągły, gdy dostaje on prawidłowy sygnał), ale mogą także pomóc namierzyć kopter po zmroku, gdy wpadnie nam w krzaki. Drobiazg, ale cieszy.
Zerkając na model z wierzchu z pewnością zauważymy antenę FPV, która wychodzi przez górną część kadłuba, ale jest mocno pochylona wzdłuż niego, aby nie dało się jej zbyt łatwo złamać, ani wyrwać. Jest to typowy dipol, ale trudno szukać zaawansowanych rozwiązań w tanim, bądź co bądź kopterze. Nie zapominajmy też, że Mobula jako taka nie jest kopterem do dalekich lotów, więc dobra antena w goglach i tak załatwi sprawę.


Możemy też bliżej przyjrzeć się mocowaniu obudowy od kamery do samej ramy. Jak wspomniałem wcześniej, mamy tutaj 2 śrubki, które trzymają z obu boków. Należy jednocześnie pamiętać, że wchodzą one w sam plastik, więc należy ostrożnie je wkręcać zmieniając kąt pochylenia kamery. W przeciwnym razie możemy zetrzeć gwint w mocowaniu i obiektyw zacznie nam opadać. Nie wydaje się też to rozwiązaniem, które wytrzyma ciągłe zmiany kąta. Raczej jest to opcja, z której korzystałbym sporadycznie.
Sam kadłub trzyma się na trzech śrubkach. Dwie po bokach, jedna z tyłu. Z przodu znajduje się kamera, więc tam nic nie zostało przykręcone. Śrubki trzymające kadłub wkręcone zostały w słupki, na których osadzony jest kontroler lotu. Ten jak zawsze jest izolowany przed wibracjami poprzez usadowienie go na gumach, które wkładamy na każdy z 4 słupków, a narożniki z wycięciami samej płytki umieszczamy w wycięciu gum. Tym sposobem kontroler lotu jest mocowany w 4 miejscach, ale elastycznie. Jest to nota bene standard w TinyWhoopach, ale stwierdziłem, że wyjaśnię to tym, którzy nie siedzą w temacie.

Koszyczek na baterię pod spodem jest dość niski i ma za zadanie zmieścić tylko jedną baterię. Jest to wynik rozwiązania, które ma wspierać latanie na 1S. Wtedy pojedynczy pakiet nie będzie się nam wysuwał.
Chcąc latać na 2S robimy następujący manewr. W środek wkładamy adapter wydrukowany na drukarce 3D wykonany z poliuretanu (TPU), który jest częściowo elastyczny. Po włożeniu pierwszej baterii normalnie, druga zmieści się dokładnie w pozostałym otworze w adapterze. Z drugiej strony oprze się ona na zewnętrznej części koszyczka na baterię. Całość siedzi w mocowaniu bardzo solidnie i nie wysunie się nam nawet, jeśli w coś uderzymy.
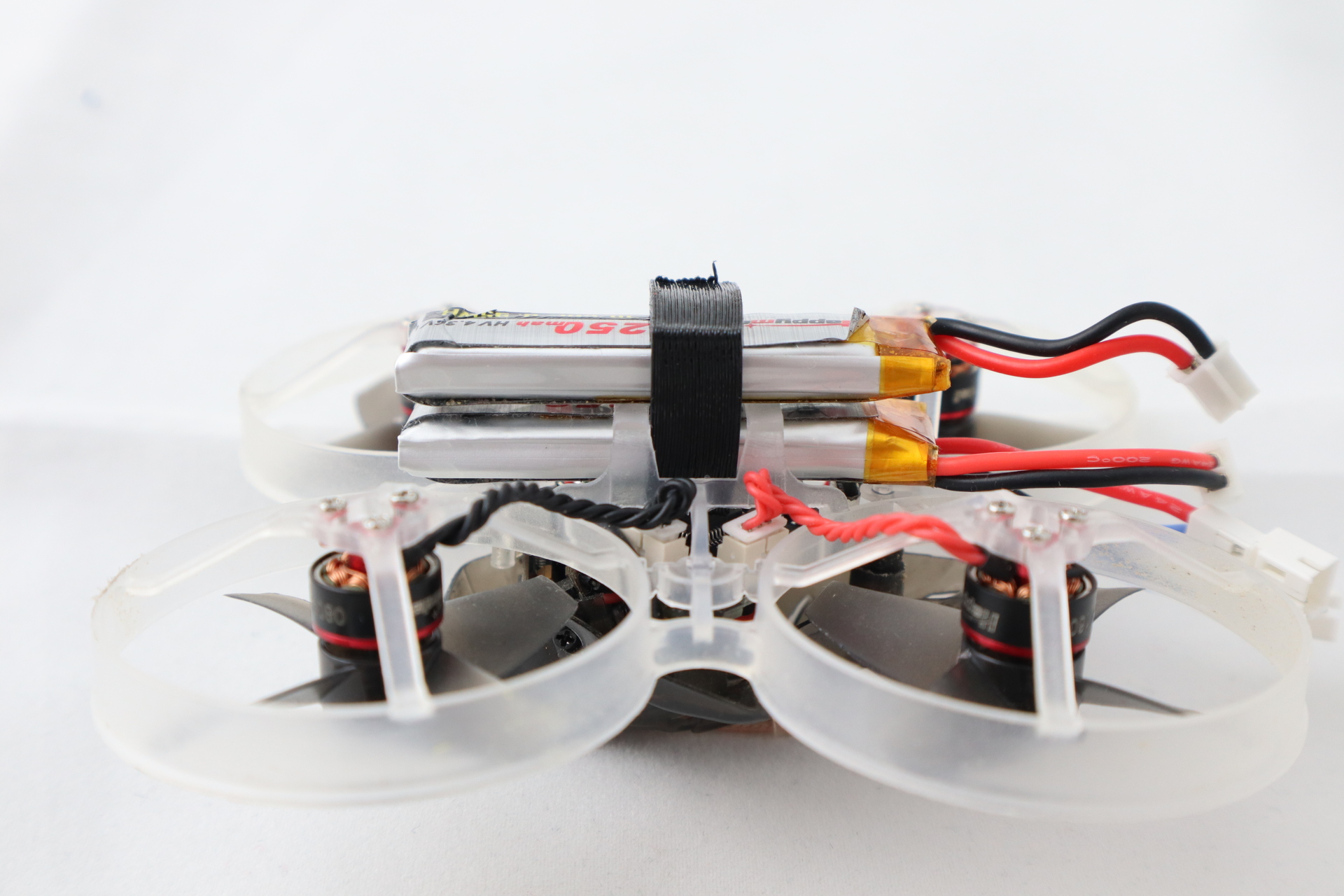

Z uwagi na to, że kopter jest zasilany dwoma osobnymi ogniwami połączonymi szeregowo, ma on też dwie wtyczki zasilające. Nie ma znaczenia w jakiej kolejności podłączymy do nich baterie. Jeśli zechcemy latać na 1S, w drugą wtyczkę wkładamy dołączoną wtyczkę-zworkę, która łączy po prostu oba piny. W ten sposób zamykamy obwód.
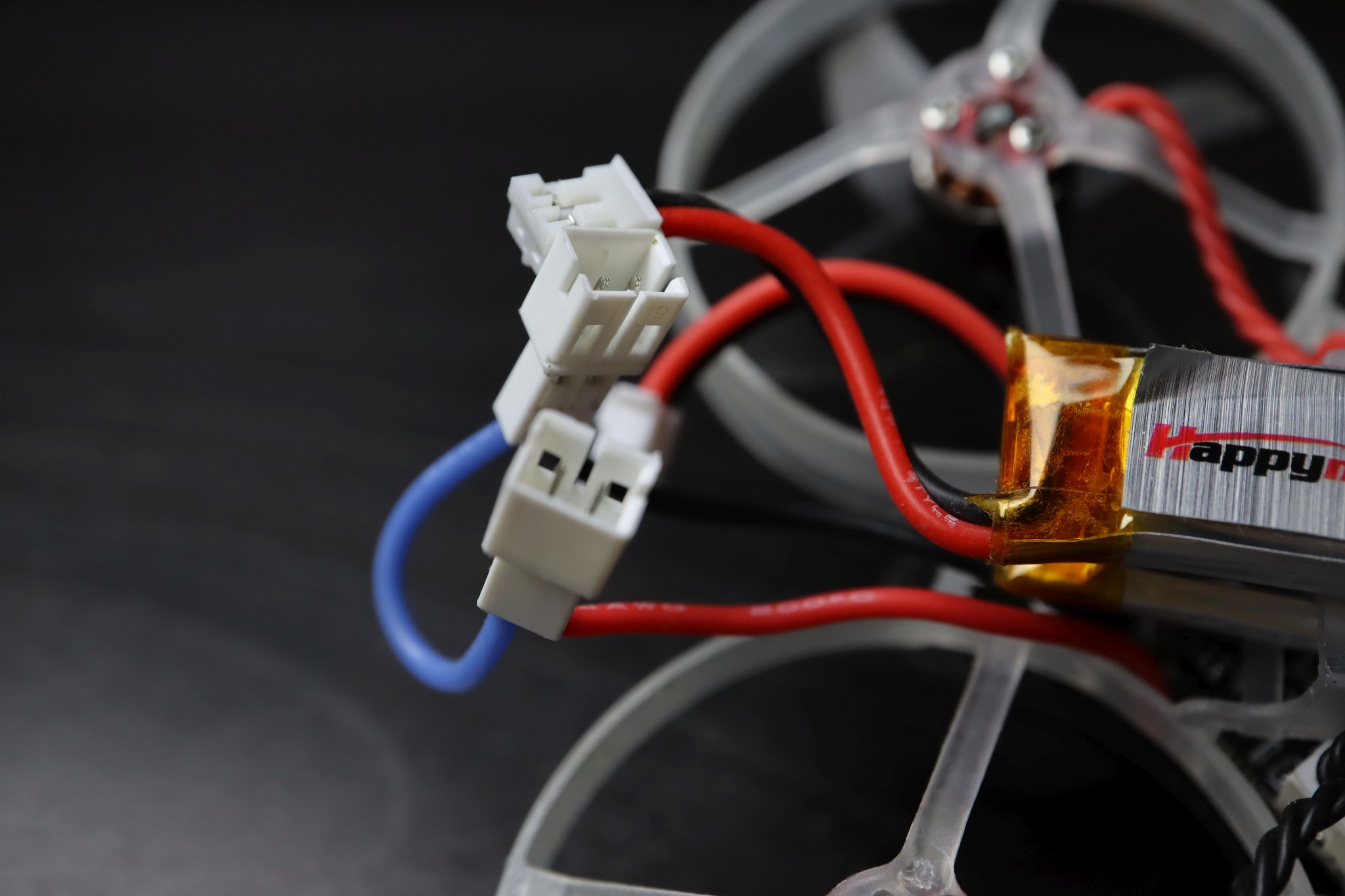
Z uwagi na zastosowanie dwóch osobnych baterii, złącze zasilania to PH 2.0. Wiem, że niektórzy przelutowują to złącze, wybierając w zamian XT-30. Sam rozważam taką zmianę w swojej Mobuli, ponieważ widzę od niedawna bardzo zauważalny spadek napięcia na samych konektorach. Nie jest to kwestia baterii, ponieważ na wszystkich parach tak się dzieje. Pod obciążeniem bardzo szybko uaktywnia się alarm niskiego napięcia, kopter zaczyna piszczeć, ale mimo to lata całkiem długo, tyle że na OSD widać cały czas okolice 3.3-3.2V, więc ewidentnie pojawia się duży opór, który blokuje swobodny przepływ prądu.

Najsłabszym ogniwem Mobuli 7 jest kamera. Ma ona szeroki kąt widzenia - 120 stopni, ale nie domaga w kwestii rozdzielczości i rozpiętości tonalnej. Najczęściej objawia się to poprzez prześwietlenia niektórych części obrazu (są za jasne, albo wręcz białe), zaś sama rozdzielczość jest zauważalnie niska. Widoczne jest ziarno, a liczba detali jest ograniczona. Wśród whoopów, którymi latałem Mobula 7 wypada najgorzej, choć to wcale nie znaczy, że nie da się nią latać. Przeciwnie, całkiem satysfakcjonująco, ale jeśli macie skalę porównawczą np. z TinyHawkiem, to bez problemu zauważycie różnicę między obydwiema kamerami.

Budowa wewnętrzna
Rozkładanie Mobuli nie jest jakimś specjalnie trudnym procesem. Musimy w zasadzie tylko zdjąć kadłub, aby dostać się do środka. Trzymają go dwie śrubki - dwie po bokach, jedna z tyłu. Bardzo przyda się dołączony w zestawie śrubokręt, ponieważ otwory znajdują się dość głęboko i niełatwo do nich dotrzeć.

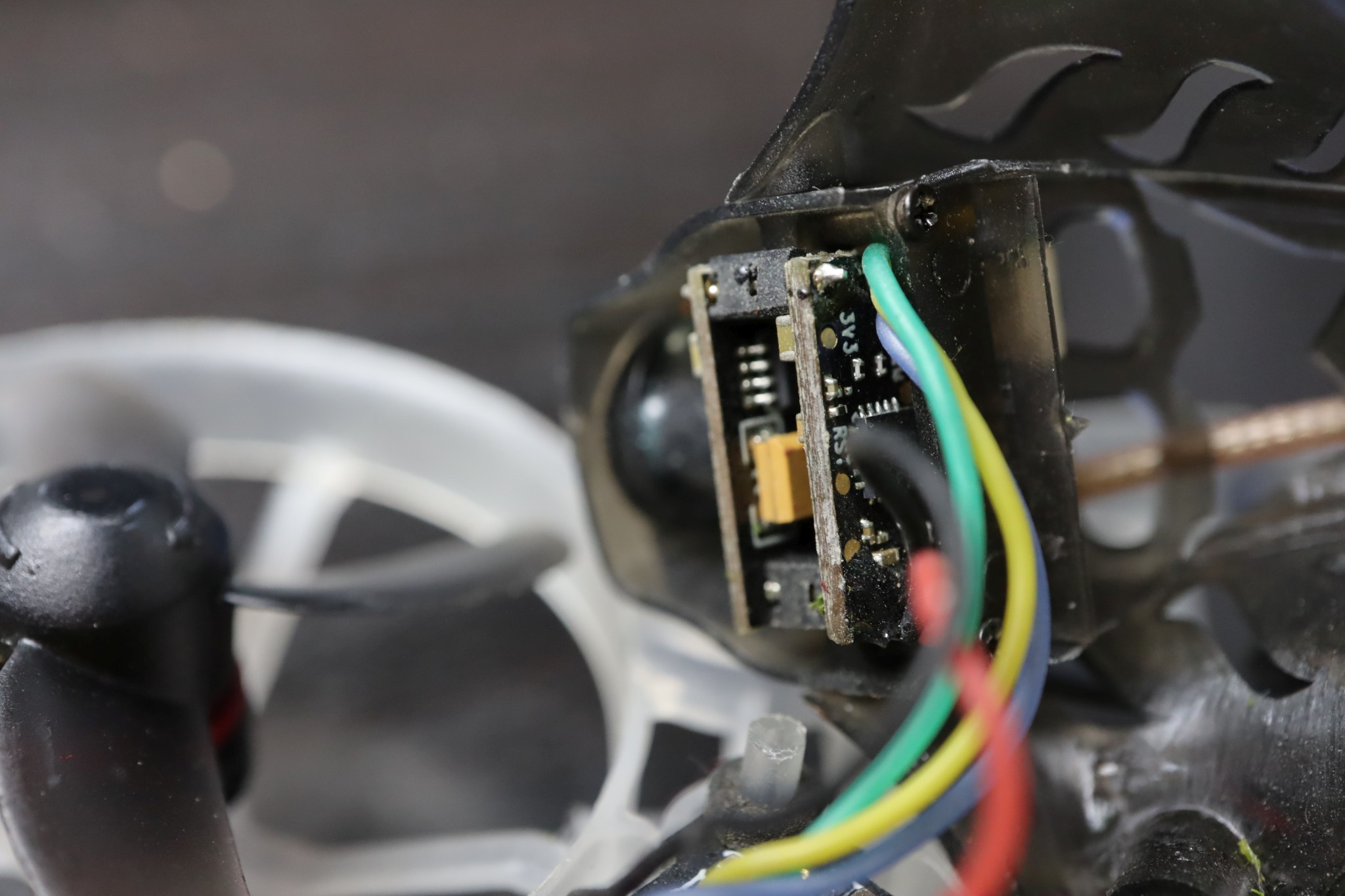
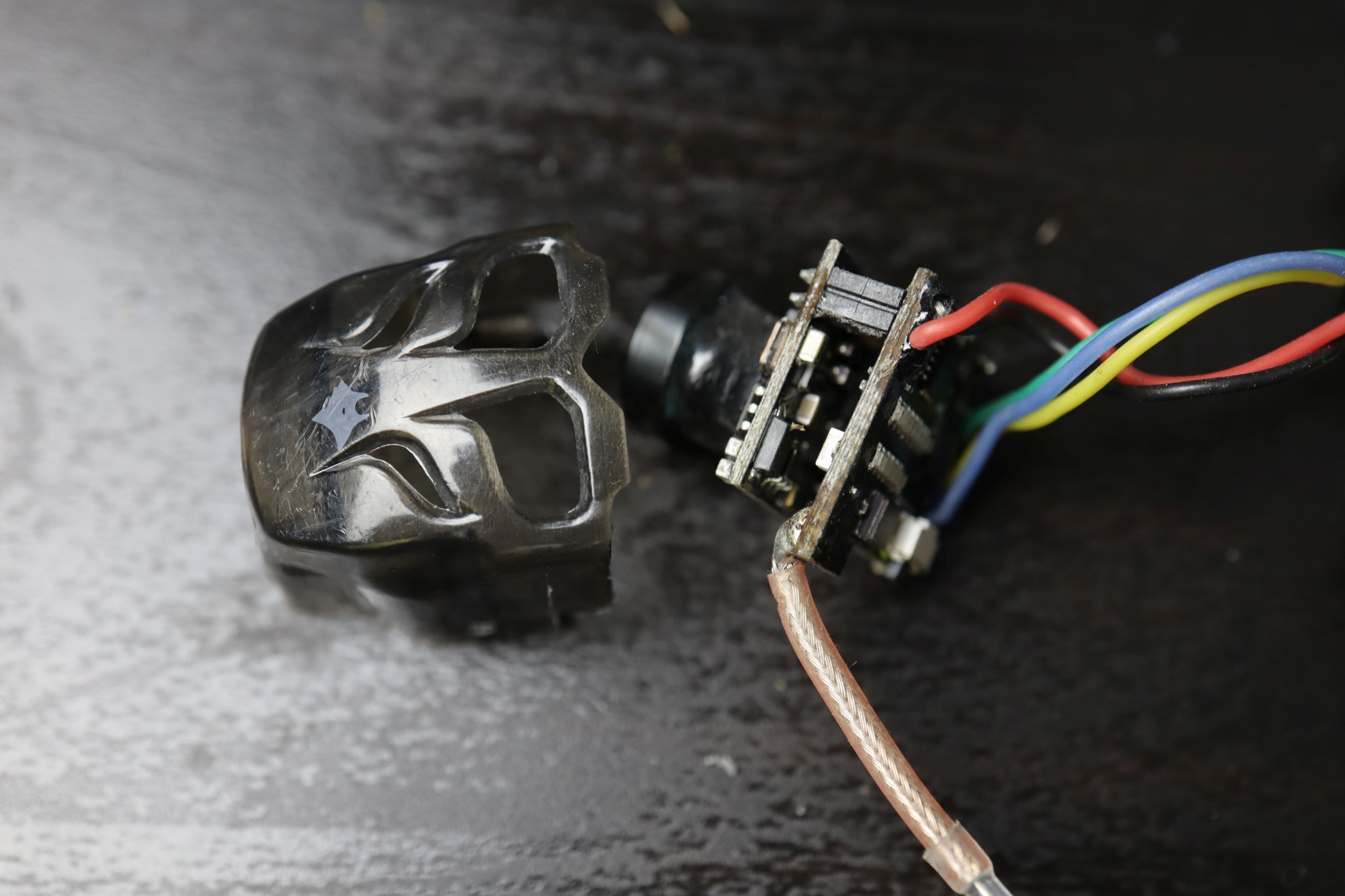
Możemy wtedy zsunąć kadłub, ale pamiętajmy o tym, że przewody od kamery z nadajnikiem są przylutowane bezpośrednio do kontrolera lotu. Oznacza to, że kadłub wciąż będzie połączony z płytką na kopterze. Możemy jednak wykręcić śrubki, które trzymają kamerę z boku.

Jak już wspomniałem, kamera jest połączona z nadajnikiem, czyli tak zwane All-In-One (AIO). Obie płytki są nierozdzielalne bez rozlutowania, a i tak w razie awarii będziemy zmuszeni kupić całość. Na szczęście tego typu rozwiązania nie są drogie, ale też są ograniczone do 25mW z uwagi na niewielkie gabaryty. Należy jednak wspomnieć, że moc nadajnika jest wystarczająca, by zapewnić dobry obraz w kontekście zasięgu sterowania, bo odbiornik zintegrowany z kontrolerem lotu nie gwarantuje tak dalekiego lotu jak na XM, czy XM+ od FrSky.
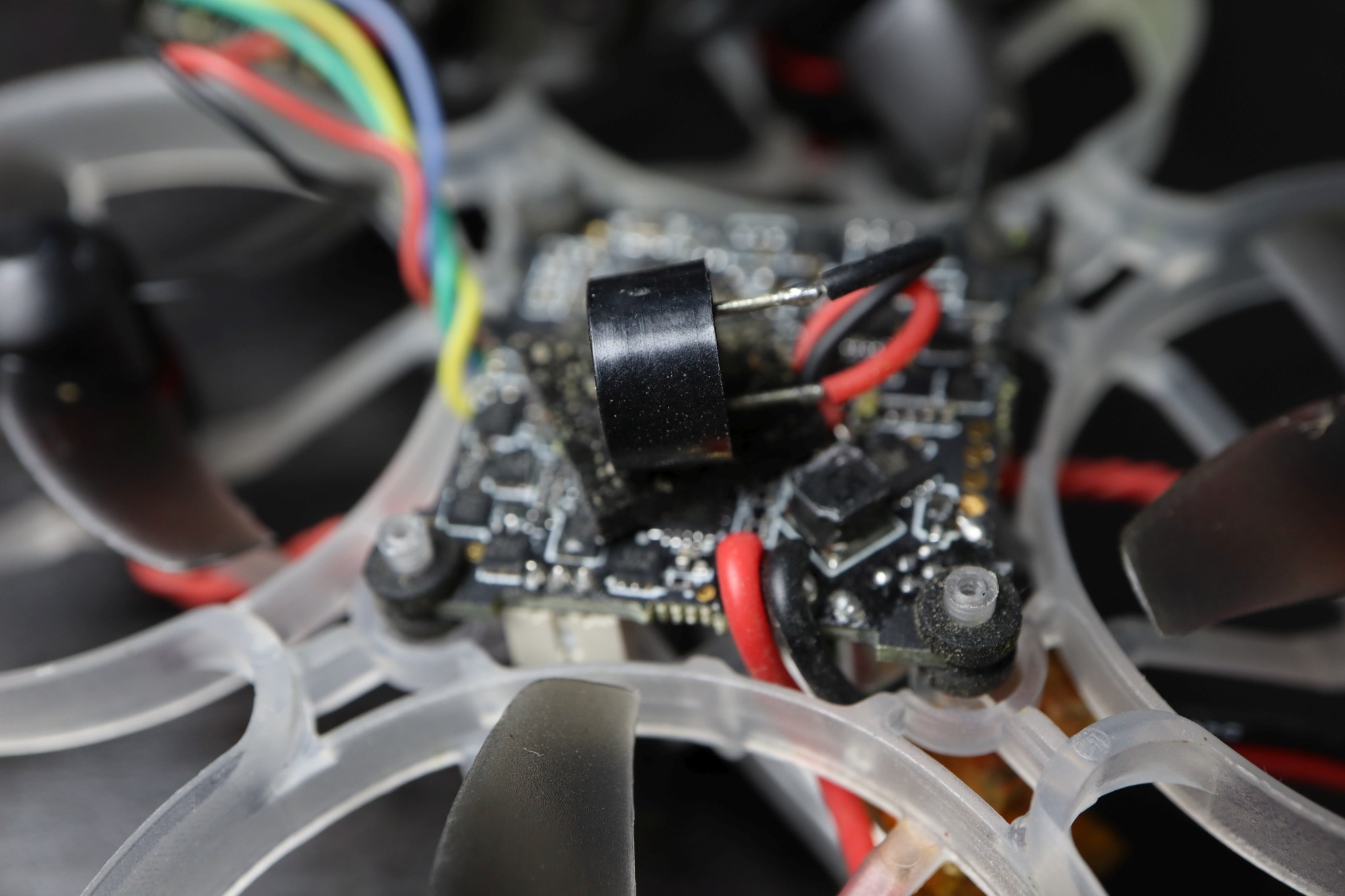
Na wierzchu kontrolera lotu przyklejono buzzer. Trzyma się on na miejscu dzięki paskowi dwustronnej taśmy. Jednocześnie w żaden sposób nie zabezpieczono wyjść tego elementu. Jeśli macie PVB60, rurkę termokurczliwą, albo kawałek taśmy izolacyjnej, to można prowizorycznie odizolować nóżki, aby podczas upadku nie zetknęły się z niczym na kontrolerze lotu.
Kontroler lotu jest zintegrowany razem z ESC. W Mobuli 7 producent zastosował CrazyBee z procesorem F3. Warto odnotować, że Betaflight jedynie do wersji 4.0 będzie go wspierała, a następne wersje będą wychodzić już tylko dla wyższych wersji: F4 i F7. Oczywiście Mobula niekoniecznie skorzystałaby z nowinek w oprogramowaniu, bo i na bieżącej wersji lata wystarczająco dobrze, ale w odróżnieniu od TinyHawka, który miał F4, nie podłączymy koptera do komputera w trybie HID, a więc nie posłuży jako pośrednik do sterowania aparaturą w symulatorach. U góry po lewej stronie zobaczymy też mikroprzycisk do bindowania (srebrny z czarną kropką). Aby połączyć naszą aparaturę z kopterem, wpierw włączmy parowanie w niej samej. Następnie musimy podłączyć Li-Po do koptera, a następnie w dowolnym momencie przytrzymać wspomniany przycisk przez 2 sekundy. Kiedy diody na kopterze (białe z przodu, czerwone z tyłu) zaczną migać powoli - oznacza to, że parowanie się udało. Po wyjściu z trybu kojarzenia na aparaturze, diody na Mobuli 7 powinny się zaświecić w sposób ciągły, sygnalizując, że mamy prawidłowe połączenie.
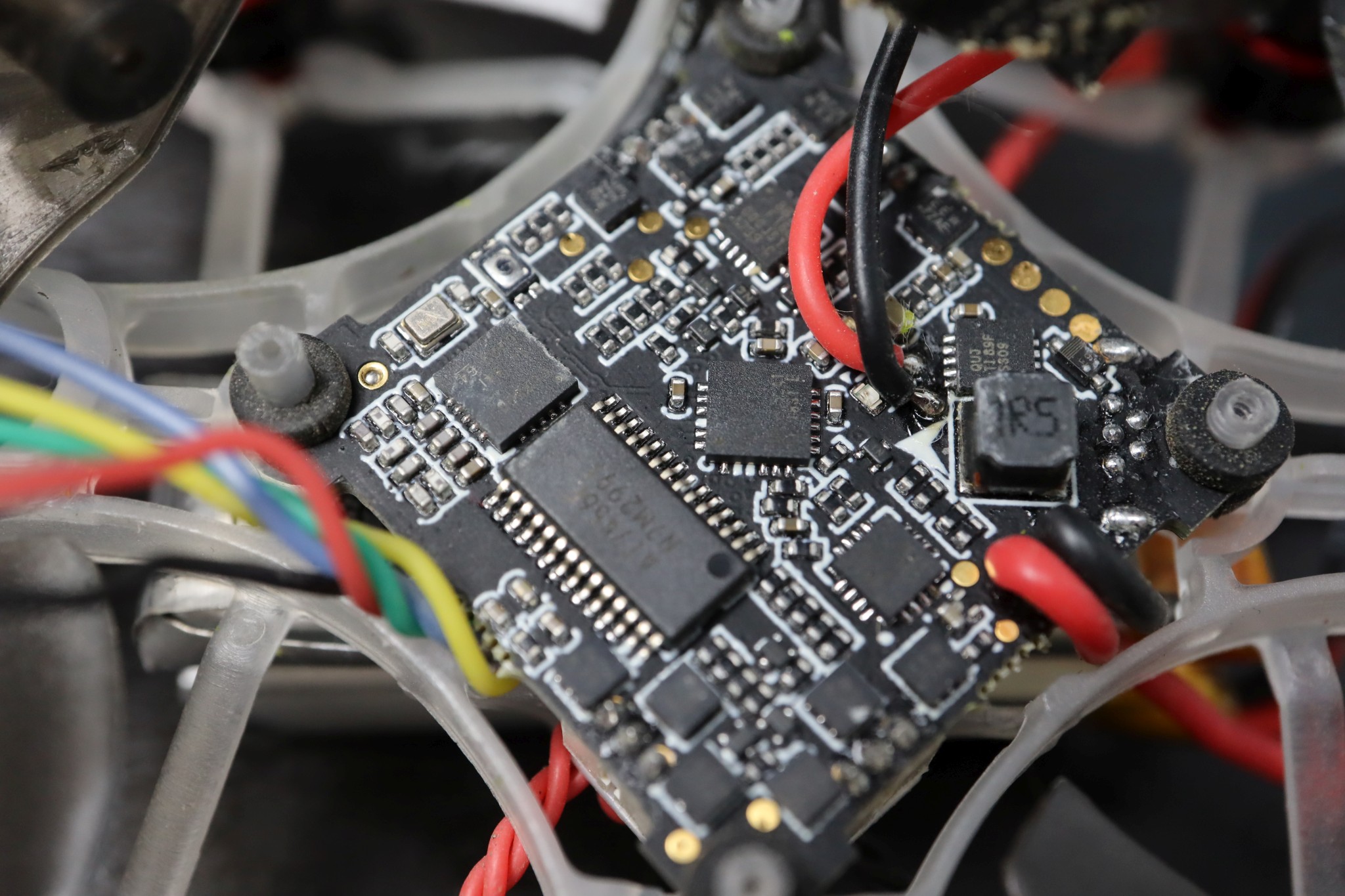
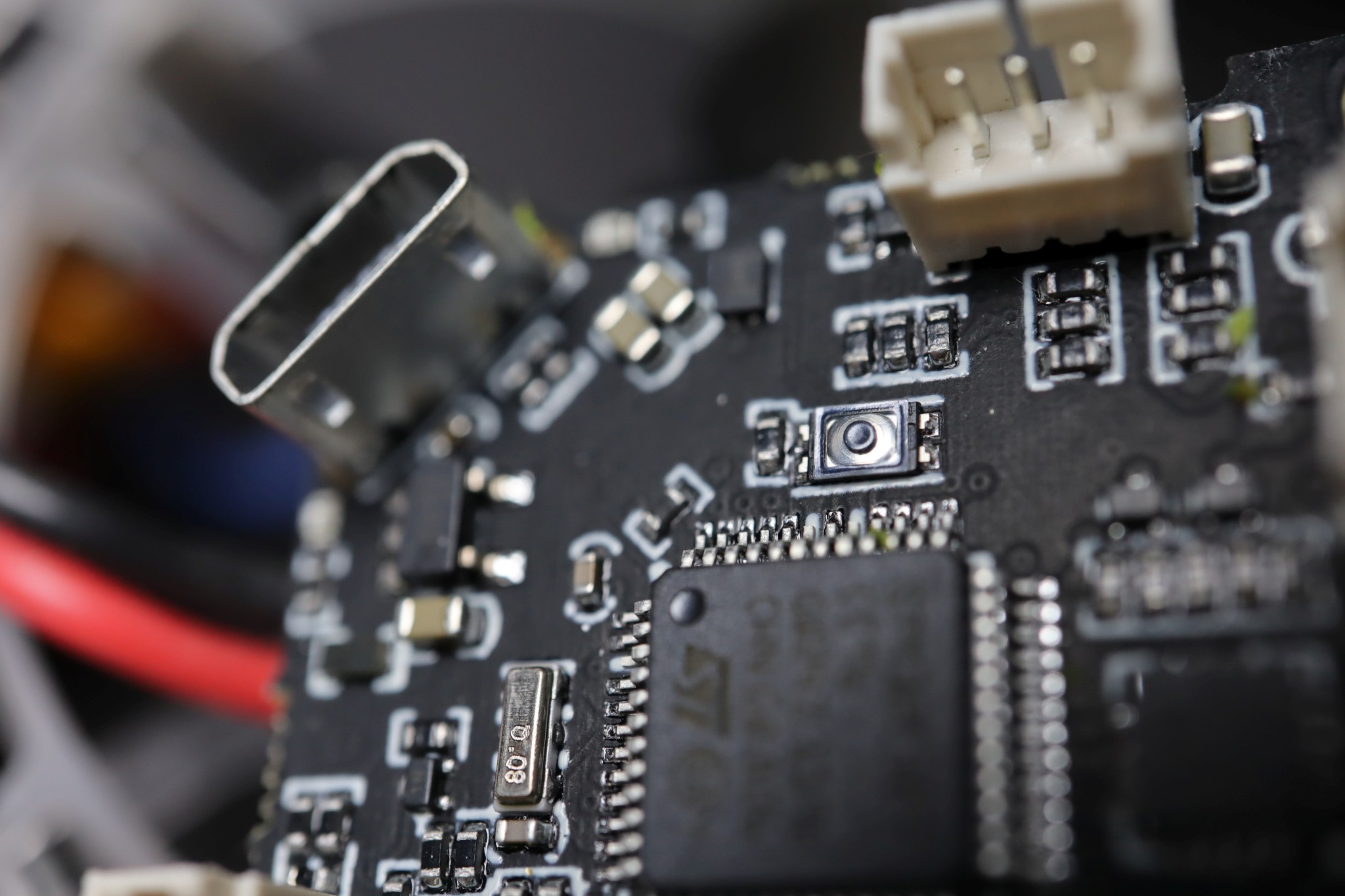
Po rozpięciu wtyczek od silników możemy też dostać się do spodu kontrolera lotu. Tam znajduje się między innymi port microUSB, który wykorzystamy do połączenia koptera z komputerem. Jest on tak umiejscowiony, abyśmy mogli dojść kablem bez potrzeby demontażu czegokolwiek oczywiście - jedynie bateria zasłania port, ale podczas konfiguracji nie musimy jej podłączać. Obok procesora F3 (największy układ scalony, dokładnie pośrodku) znajduje się miniaturowy przycisk. Służy on do wprowadzenia kontrolera lotu w tryb DFU i wgrywanie nowszych wersji Betaflight.

Kamerę da się oczywiście wyjąć z obudowy. Z tyłu znajduje się plastikowa poprzeczka, która jest zamocowana na dwóch śrubkach. Po jej demontażu kamera wyjdzie w całości z obudowy.
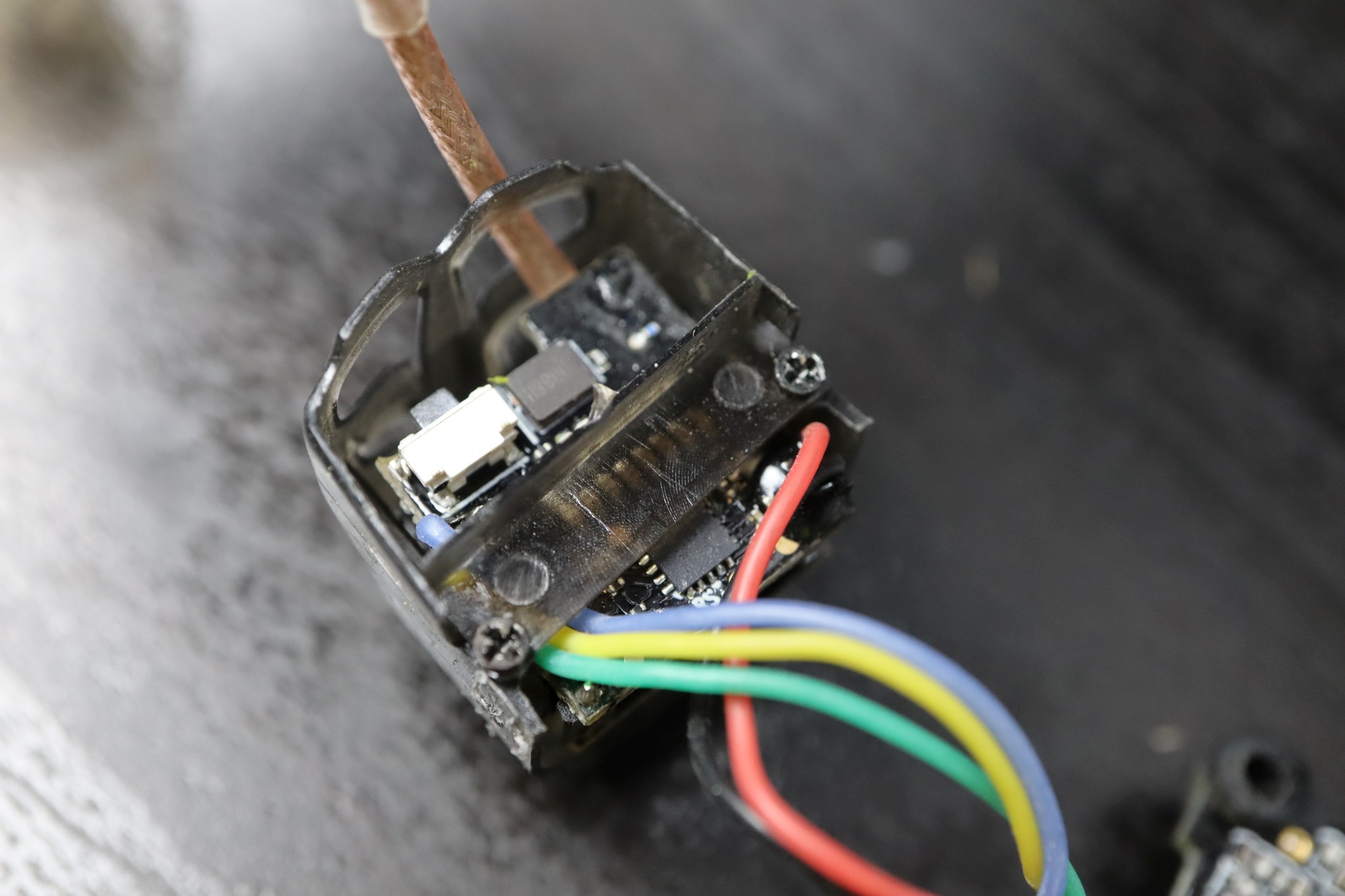
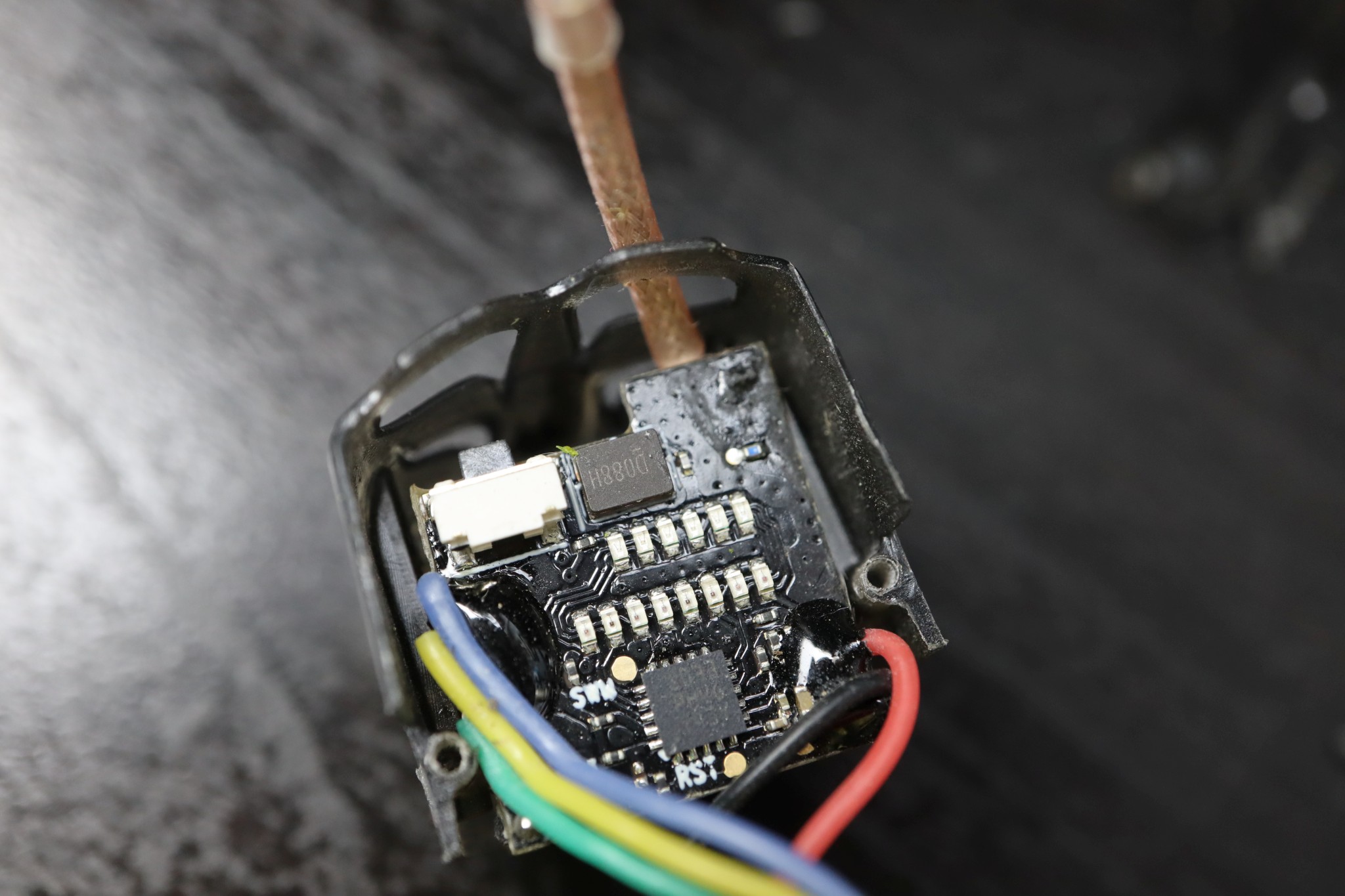
Przy okazji zwróćmy uwagę na antenę, która jest przylutowana na sztywno. Akurat w kamerach AiO jest to bardzo popularne z uwagi na skromne gabaryty.
Charakterystyka lotu
Podsumowanie
HappyModel Mobula 7 to całkiem udany kopter, szczególnie gdy spojrzymy na niego w kontekście ceny. Nie składa się z najwyższej klasy komponentów, ani też nie jest wzorem dla innych kopterów 2S, ale w całokształcie jest właśnie taki - przyzwoity. Producent postawił na elastyczność i tutaj akurat trudno narzekać. Możemy pochylać kamerę do latania szybkiego, albo spokojnego, jak również dostajemy opcję latania na 1S i 2S, co z punktu widzenia rynku wcale nie jest takie powszechne. Kamera nie rzuca na kolana, ale wystarcza, żeby coś było widać. Kadłub jest całkiem trwały, czego nie można powiedzieć o ruchomym mocowaniu samego obiektywu. Złącze PH 2.0 ma tendencję do degradacji wraz z czasem użytkowania modelu. Jednocześnie Mobula 7 ma całkiem przyjemną charakterystykę lotu, jest dynamiczna na 2S i posiada fabryczny buzzer, który pozwala ją znaleźć, gdy spadnie nieco dalej od nas. Jednocześnie, jeśli lubimy dłubać i mamy ochotę nieco ją doinwestować kupując ramę V3, dokładając LEDy i manipulując nieco ustawieniami kontrolera PID, możemy za przyzwoitą kwotę kupić naprawdę niezły kopter, który pozwoli się nam cieszyć FPV na zewnątrz i w środku, wszędzie tam, gdzie latanie czymś większym wiązałoby się z niepotrzebnym ryzykiem.
Ocena 4Śmigła.pl: 4.0 / 5.0 ![]()
![]()
![]()
![]()
![]()
Mobula 7 - Banggood
Mobula 7 - Gearbest
Warto wiedzieć
Latanie na 1S
Mobula 7 pozwala na latanie z jednym tylko pakietem. Należy jednak pamiętać, że z punktu widzenia samego napięcia, różnica między 1S, a 2S jest dokładnie dwukrotna i wartość KV, którą mają silniki jest kompromisem. Dla 1S mogłaby być wyższa, bądź po prostu agresywniejsze śmigła (o większym skoku). Moje testy wykazały, że da się latać Mobulą 7 po domu na 1S, ale ewidentnie brakuje mu trochę mocy przy maksymalnym wychyleniu lewego manipulatora. Jest to zauważalne, gdy chcemy nieco dynamiczniej poszaleć i przy zwrotach musimy je mocno kompensować przepustnicą. W tym względzie właśnie odczuwa się kompromis. TinyHawk był przeznaczony do latania na 1S i jego śmigła i silniki lepiej się w tym względzie sprawdzają. Za to nie ma dynamiki Mobuli 7, bo umówmy się, dodatkowe 3-4V różnicy robią gigantyczą różnicę przy tak małych silnikach.
Opadająca kamera
Tak, jak przewidywałem, kamera "zjechała" po jednym z uderzeń o ziemię. Na usprawiedliwienie Mobuli 7 powiem, że to był Failsafe, więc kopter spadł trawę, ale z parunastu metrów, więc ogólnie zniósł to bardzo dobrze. Z drugiej strony po uderzeniu kamera się obluzowała i skierowała w dół. Po dokręceniu śrub znowu trzyma swoją pozycję, ale jedna z nich zdaje się mieć już wyrobiony gwint, więc nie trzyma tak mocno, jak druga. W najgorszym przypadku po prostu przykleję kamerę w jednej pozycji, no ale cóż, mocowanie nie jest najpewniejsze.
Mocowanie listwy LED
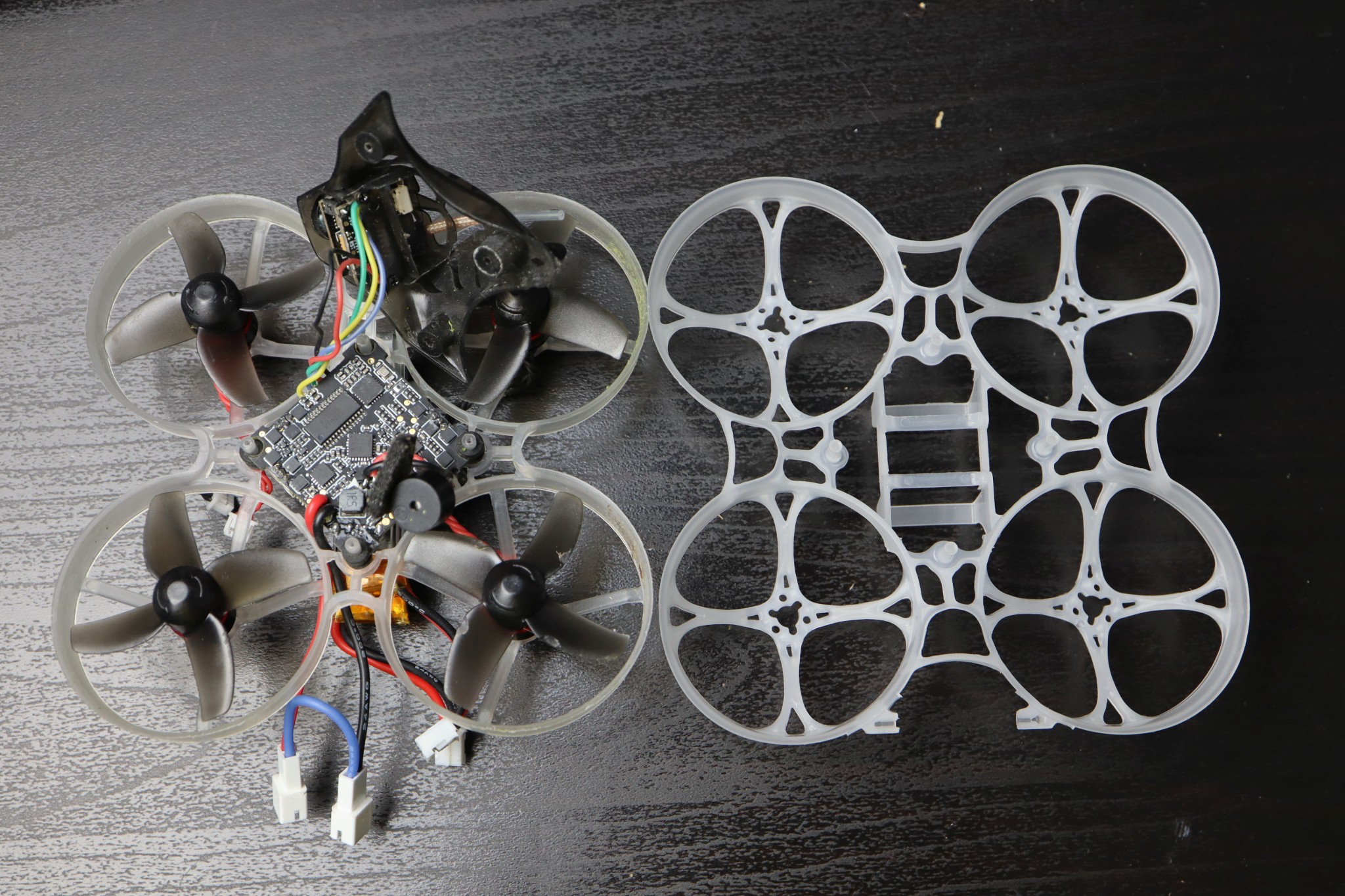
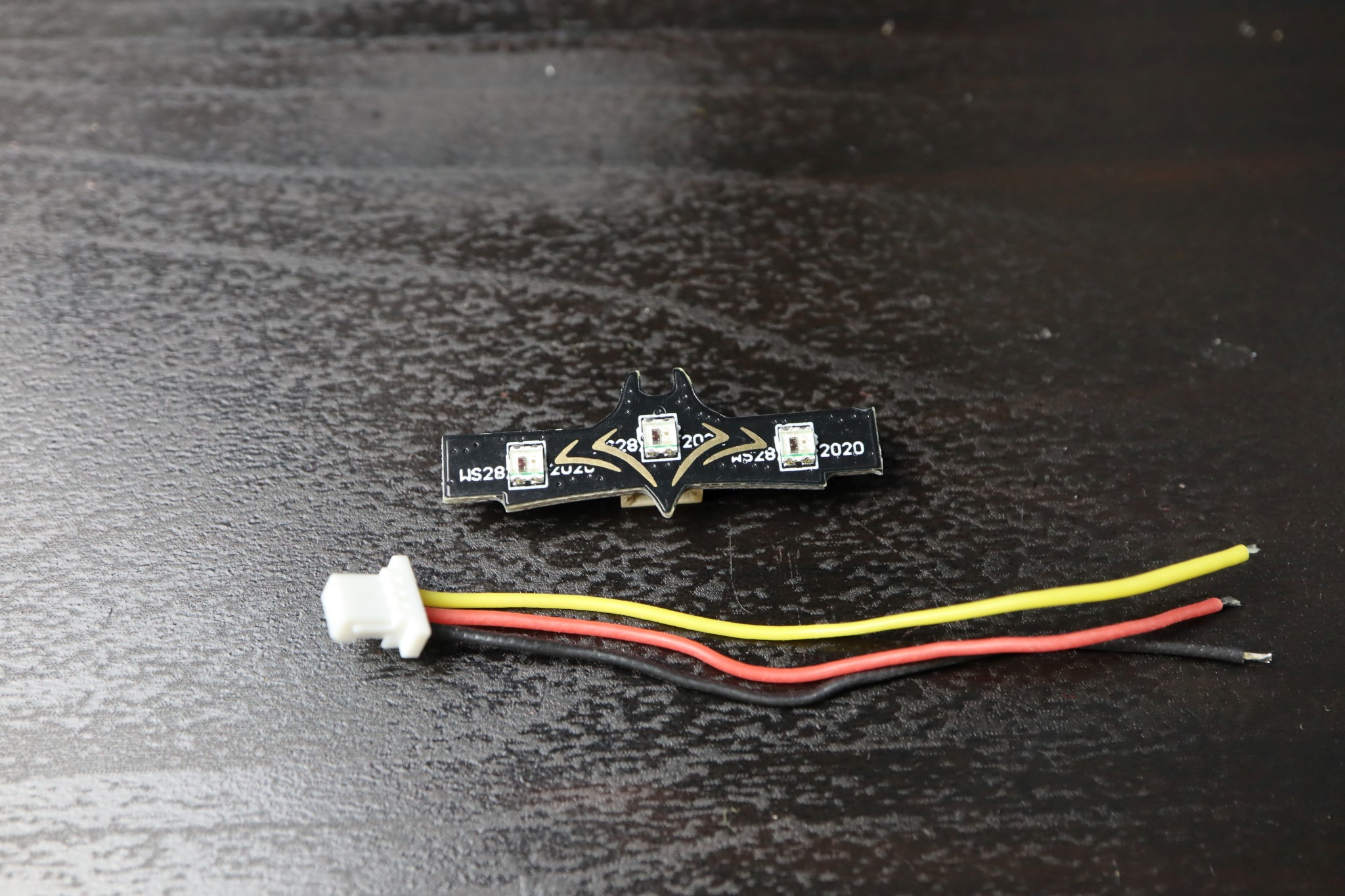
Mobula 7 nie ma z tyłu diod, ale można je osobno dokupić, a kontroler lotu ma odpowiednie wyprowadzenia. Jest to miniaturowa, podłużna płytka z 3 LEDami ułożonymi w rzędzie. Dają one dodatkowe oświetlenie z tyłu. Nim jednak pójdziecie na zakupy obejrzyjcie ramę, którą otrzymaliście. Ja otrzymałem ją parę miesięcy temu jeszcze z wersją 1, która nie miała mocowania na LEDy i musiałem kupić nowszą wersję ramy.
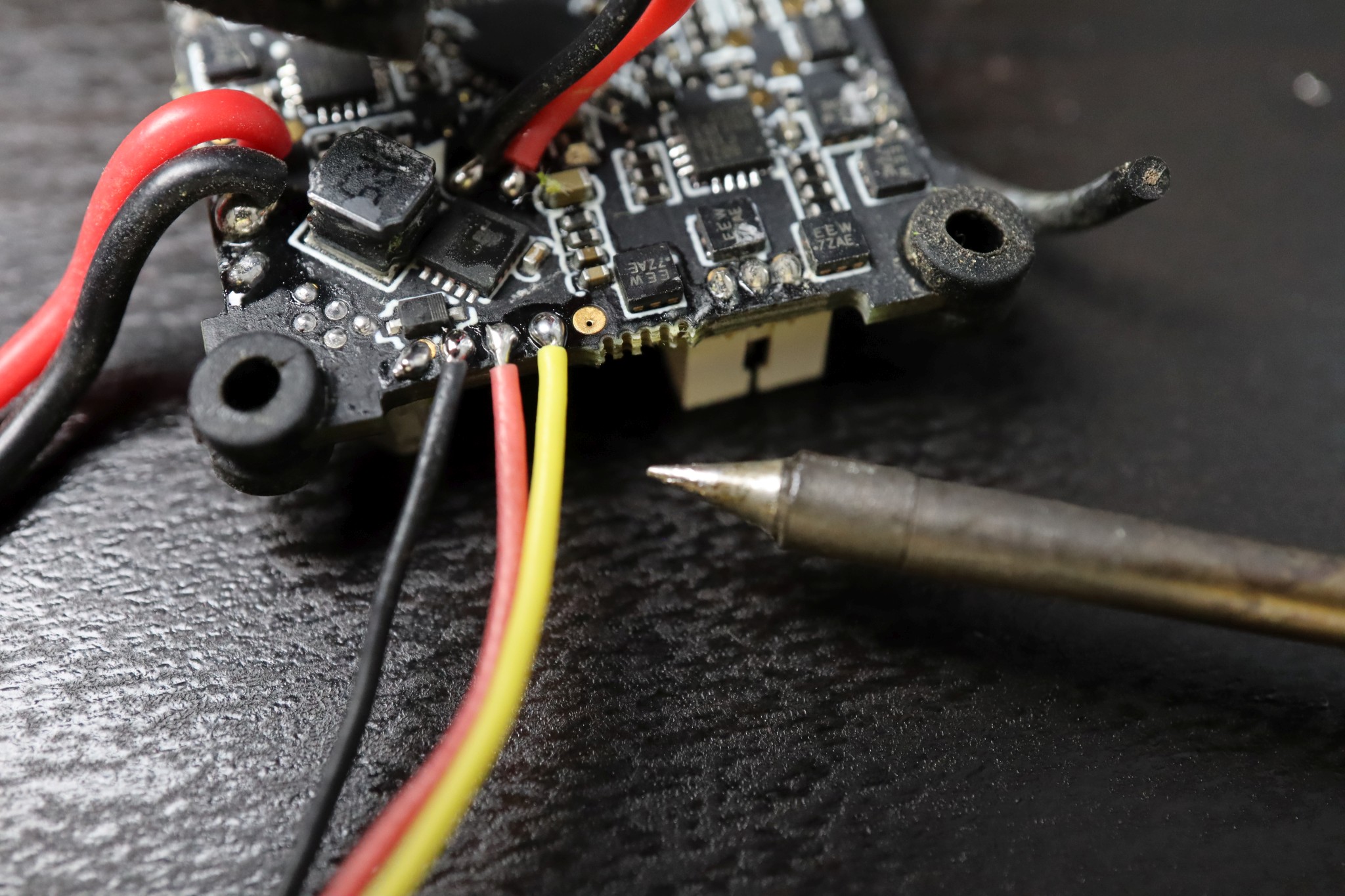
Wraz z listwą diodową otrzymujemy też przewód zakończony wtyczką. LEDy mają odpowiednie gniazdo. Jak nietrudno się domyślić, czerwony i czarny przewód to zasilanie, zaś żółty dostarcza sygnał sterujący bieżącym kolorem diod.
Aby diody zadziałały, musimy przylutować wszystkie 3 przewody do kontrolera lotu. Odpowiednie pady są pokazane w instrukcji od kontrolera lotu. Interesują nas pierwsze 3 od lewej strony. Pierwszy, już pokryty cyną, należy do gniazda microUSB, więc jego pomijamy. Szykujemy natomiast 3 kolejne. Ostatni nie będzie nam potrzebny.
{kind=link}
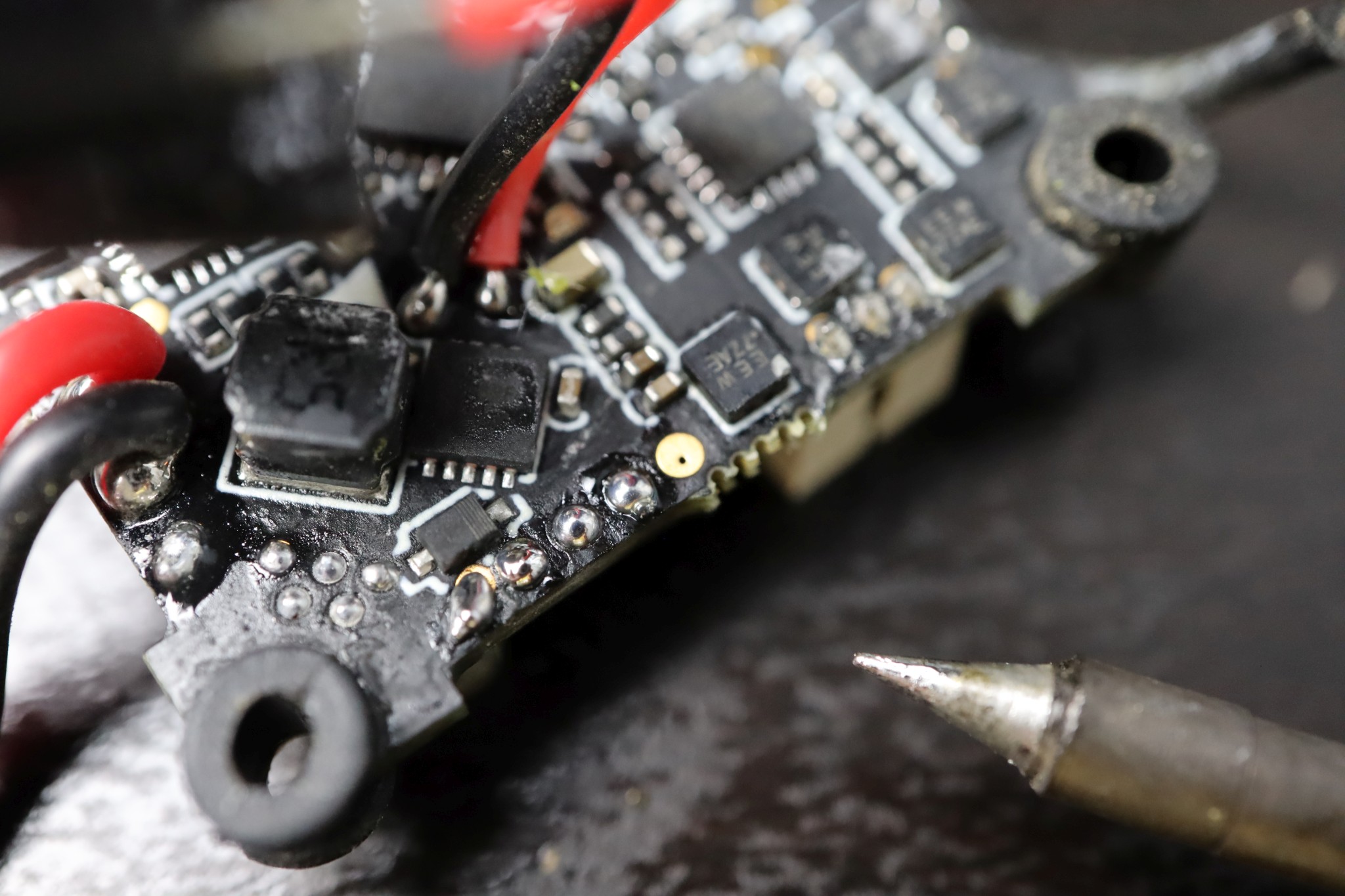
Punkty do lutowania są dość małe, więc zwrócmy baczną uwagę, czy nie zwarliśmy którejś z par. Gdyby tak się stało, można potraktować miejsce lutowania topnikiem, użyć odsysacza cyny, albo plecionki do rozlutowywania. Jeśli będziemy mieli wątpliwości - od tego jest miernik elektryczny, który w trybie mierzenia ciągłości obwodu pozwoli stwierdzić, czy mamy zwarcie. Kolejność lutowania jest przedstawiona na zdjęciu poniżej, ale dla porządku jeszcze podam, że jest to odpowiednio GND (czarny), 5V (czerwony) i LED_STRIP (zółty).
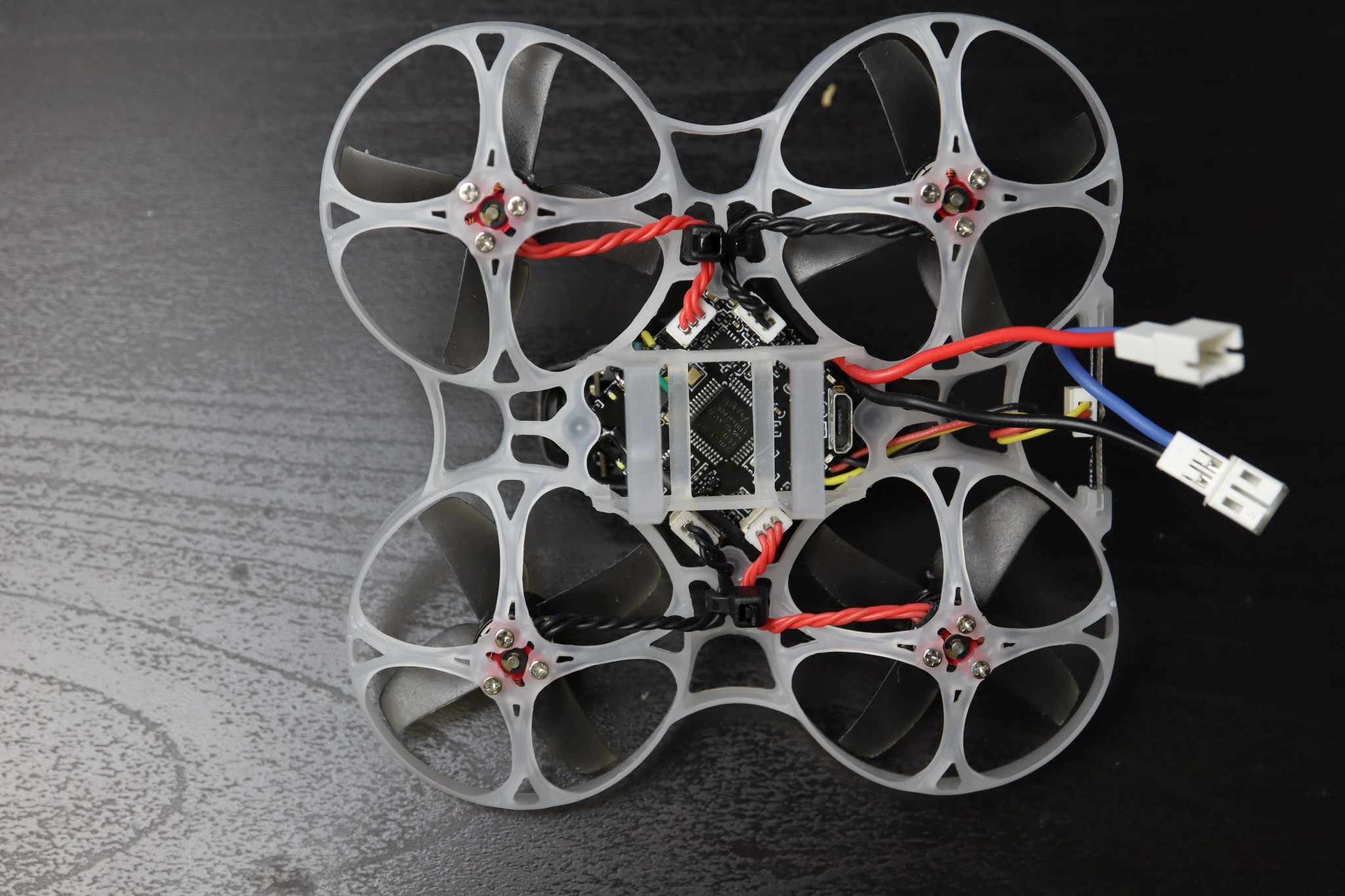
Oryginalnych przewodów nie skracałem. W zamian, zostawiając pewien bufor i odciążając pola lutownicze, zawinąłem przewody wokół tylnej poprzeczki i dopiero wpiąłem wtyczkę do LEDów. Tym sposobem, gdybym wyrwał diody przy upadku, szarpnięcie rozłoży się częściowo na pętli, która znajduje się na poprzeczce z tyłu. Gdybym pociągnął je bezpośrednio, byłoby ryzyko, że urwę jeden z punktów, które lutowałem, a naprawienie tego nie należałoby do łatwych.

Korzystając z tego, że wymieniłem ramę i wlutowałem LEDy, przy okazji zrobiłem porządek z przewodami od silników. Aby nie były luźne, spiąłem obie pary opaskami zaciskowymi. Jest to operacja, którą należy wykonywać delikatnie, ponieważ izolacja przewodów jest cienka (choć wykonana z silikonu, więc giętka i elastyczna), a opaska może ją rozciąć ostrą krawędzią. Jeśli jednak nie zaciśnie się ich zbyt mocno, będą trzymały kable z dala od śmigieł, a przy okazji przewody nie będą luźno dyndały. Tak wygląda to zdecydowanie estetyczniej.
Instrukcja konfiguracji Betaflight i parowania z aparaturą
Wersja online instrukcji znajduje się tutaj: Mobula 7 - instrukcja
{kind=link}